一种用于机器人零部件测试的测试装置的制作方法
1.本实用新型涉及零部件测试技术领域,具体为一种用于机器人零部件测试的测试装置。
背景技术:
2.测试工装是为了方便生产测试、来料检验、返厂维修而制作的半自动化测试平台。它可测试agv控制器、电机驱动器、磁导航传感器、避障传感器、地标等外挂件,这些外挂件简称被测设备。
3.现有测试工装包括稳压电源、万用表、电脑及被测设备。测试被测设备之前,先用万用表测试被测设备的电路板是否合格,然后将被测设备通过人工手动将零部件的电源线接至稳压电源的输出端,再将信号线接至usb转串口的接线端子上,最后将usb接头接至电脑usb接口,打开相对应的零部件测试软件进行单一的零部件测试,观察零部件测试软件是否有相对应的数据上传,根据数据判断该零部件是否合格。
4.但是,现有的测试工装只能对单一的零部件进行测试,如果有多个零部件则需多次测试,导致测试过程繁琐复杂,费时费力,且工作效率低。
技术实现要素:
5.本实用新型的目的在于提供一种用于机器人零部件测试的测试装置,能够实现单个零部件测试,同时也可以实现多个零部件共同测试。
6.本实用新型提供了一种用于机器人零部件测试的测试装置,包括:
7.测试台;
8.agv控制器,其设在测试台上;
9.继电器组,其各个端口均与agv控制器连接;
10.带灯自锁按钮箱,其各个带灯自锁按钮的开关均与继电器组上的端口连接;
11.多组驱动组件,均与继电器组上的端口连接;
12.接线端子排,其各个端口均通过继电器组上的端口与agv控制器连接;其中多组被测设备分别通过接线端子排与agv控制器连接。
13.进一步地,还包括:
14.空气开关,其输入端与测试台上接入的供电电源连接;
15.电源模块,其输入端连接在空气开关的输出端上;
16.电压电流表,其输入端连接在空气开关的输出端上;
17.所述电源模块、电压电流表的输出端分别通过继电器组上的端口与agv 控制器连接。
18.进一步地,所述驱动组件至少为两组;
19.每组所述驱动组件,均包括:
20.电机;
21.电机驱动器,所述电机与其对应的电机驱动器通过导线连接,所述电机驱动器与电源模块电连接。
22.进一步地,还包括指示灯箱,各个指示灯的开关均与agv控制器连接。
23.进一步地,所述被测设备包括:
24.一组避障传感器或者地标传感器或者一组磁导航传感器或者无线充电器或者四合一仪表或者避障传感器、地标传感器、磁导航传感器、无线充电器以及四合一仪表任意组合,其均通过接线端子排与agv控制器连接。
25.进一步地,所述一组避障传感器,包括:前避障传感器和后避障传感器。
26.进一步地,所述一组磁导航传感器,包括:前磁导航传感器和后磁导航传感器。
27.进一步地,所述agv控制器通过232串口或网口线与电脑连接。
28.与现有技术相比,本实用新型的有益效果:
29.本实用新型中提供了一种用于机器人零部件测试的测试装置,该测试平台利用了机器人本身的设备作为激励信号,来测试其他零部件,通过带灯自锁开关按钮控制继电器组的通断状态作为外接测试状态和测试状态。每路都能用于测试各零部件及外部被测零部件状态,在继电器组中的继电器处于常闭时为测试状态;当继电器组中的继电器处于常开时为外部设备被测状态。所有设备既可以作为测试设备也可以作为被测设备。
30.此测试平台涵盖了目前机器人的基本零部件,包含agv控制器、电机驱动器、磁导航传感器、避障传感器、地标等外挂件设备,可以单个零部件测试,也可以同时多个零部件共同测试。具有简单、便捷、可靠、易上手等优点,大大提高了零部件测试的工作效率。
附图说明
31.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
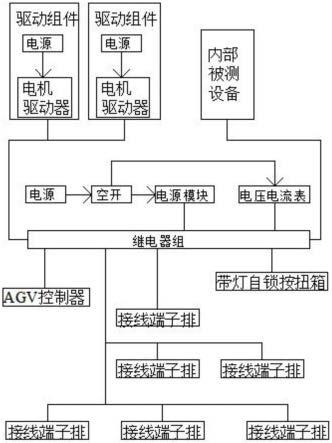
32.图1是本实用新型提出的一种用于机器人零部件测试的测试装置的结构连接示意图;
33.图2是本实用新型提出的一种用于机器人零部件测试的测试装置的实施例中的结构连接示意图。
具体实施方式
34.下面结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
35.实施例
36.如图1所示,本发明提供一种用于机器人零部件测试的测试装置,包括:
37.测试台;agv控制器,其设在测试台上;继电器组,其各个端口均与agv 控制器连接;带灯自锁按钮箱,其各个带灯自锁按钮的开关均与继电器组上的端口连接;多组驱动组件,均与继电器组上的端口连接;接线端子排,其各个端口均通过继电器组上的端口与agv控制器连接;接线端子排,其各个端口均通过继电器组上的端口与agv控制器连接;其中多组被测设备分别通过接线端子排与agv控制器连接。
38.本实用新型中,还包括:
39.空气开关,其输入端与测试台上接入的供电电源连接;
40.电源模块,其输入端连接在空气开关的输出端上;
41.电压电流表,其输入端连接在空气开关的输出端上;
42.电源模块、电压电流表的输出端分别通过继电器组上的端口与agv控制器连接。
43.本实用新型中的驱动组件至少为两组;
44.每组驱动组件,均包括:
45.电机;
46.电机驱动器,电机与其对应的电机驱动器通过导线连接,电机驱动器与电源模块电连接。
47.本实用新型中,还包括指示灯箱,各个指示灯的开关均与agv控制器连接。
48.本实用新型中的被测设备包括:
49.一组避障传感器或者地标传感器或者一组磁导航传感器或者无线充电器或者四合一仪表或者避障传感器、地标传感器、磁导航传感器、无线充电器以及四合一仪表任意组合,其均通过接线端子排与agv控制器连接。
50.其中,一组避障传感器,包括:前避障传感器和后避障传感器。
51.一组磁导航传感器,包括:前磁导航传感器和后磁导航传感器。
52.本实用新型中的被测设备,可以是内部被测设备,也可以是外部被测设备。
53.本实用新型中的agv控制器通过232串口或网口线与电脑连接
54.下面结合具体的实施例对本实用新型做具体实施方式的说明。
55.如图2所示,电压电流表和24v及12v电源模块分别接在空气开关输出端上,最后将12v及24v电源模块的输出端接在继电器组上,最后从继电器组的端口上接在agv控制器上。4个电机驱动器、2个磁导航传感器、2个避障传感器、1个地标、1个无线充电器分别接在继电器组上相对应的接口上,然后从继电器组相对应的的接口分别接在agv控制器和外接端子排上,带灯自锁按钮分别接在对应的继电器上,最后用232串口线(或网口线)将电脑与agv 控制器连接。
56.工装所有的部件;每一个部件与每一个的连接,具体连接关系如下:
57.48v电源模块
‑‑
空气开关
‑‑
电压电流表和24v电源模块和12v电源模块
ꢀ‑‑
agv控制器;
58.电机
‑‑
驱动器
‑‑
继电器组
‑‑
接线端子排和agv控制器;
59.避障传感器
‑‑
继电器组
‑‑
接线端子排和agv控制器;
60.地标传感器
‑‑
继电器组
‑‑
接线端子排和agv控制器;
61.磁导航传感器
‑‑
继电器组
‑‑
接线端子排和agv控制器;
62.无线充电器
‑‑
继电器组
‑‑
接线端子排和agv控制器;
63.四合一仪表
‑‑
继电器组
‑‑
接线端子排和agv控制器;
64.带灯自锁按钮箱
‑‑
继电器组;
65.指示灯箱
‑‑
agv控制器;
66.1、给测试平台上通电并打开modbus poll软件。
67.2、当modbus运行起来后检查各项数据是否正常,具体包括:
68.①
:四个电机是否转动;
69.②
:拿障碍物在前后避障传感器正前方挡住,看是否会避障传感器;
70.③
:拿一根磁条在前后磁导航传感器上方4cm处放置并左右移动,看 modbus上的前后磁导航传感器是否有数据变换;
71.④
:拿一个地标卡在地标传感器上方约10cm处放置待地标传感器绿灯闪烁后拿走地标传感器看modbus上的地标传感器位有无地标卡上的数据;
72.⑤
:在modbus上看甲烷、硫化氢、温度及湿度是否有数据显示。
73.如以上数据均正常,则进行下一步,若不正常则需根据不正常项进行问题排查。
74.3、如果进行单个零部件测试,则将需测试的零部件接入对应的接线端子排上进行测试。
75.4.1、前、后避障传感器的测试
76.将前、后避障传感器的四芯线按照线号颜色接在对应的接线端子排上,并在带灯自锁按钮箱上找到相对应的按钮按压使之灯亮后会听见继电器由常闭切换到常开的吸合声音后,在拿障碍物在前避障传感器或后避障传感器的正前方挡住,然后在modbus上查看前后避障传感器是否有数据,若有数据上来就说明前后避障传感器测试结果良好;若无数据则需排查问题所在。
77.4.2、前、后磁导航传感器的测试
78.将前、后磁导航传感器的四芯线按照线号颜色接在对应的接线端子排上,并在带灯自锁按钮箱上找到相对应的按钮按压使之灯亮后会听见继电器由常闭切换到常开的吸合声音后,在拿磁条在前磁导航传感器或后磁导航传感器的正上方约4cm处放置,然后在modbus上查看前、后磁导航传感器是否有数据,若有数据上来就说明前后磁导航传感器测试结果良好;若无数据则需排查问题所在。
79.4.3、电机驱动器的测试
80.将需要测试的电机驱动器按要求刷写程序后再按照电机驱动器安装位置把电机驱动器的电源线、霍尔线及can总线接在对应的接线端子排上。然后在带灯自锁按钮箱上找到对应的按钮按压使之灯亮后打开modbus运行,若对应的电机能够根据指令进行正常的正转或反转则说明该驱动器性能完好。反之则不正常,需进一步排查问题。
81.4.4、地标传感器的测试
82.将地标传感器的四芯线按照线号颜色接在对应的接线端子排上,并在带灯自锁按钮箱上找到相对应的按钮按压使之灯亮后会听见继电器由常闭切换到常开的吸合声音后,拿一个地标卡在地标传感器的正上方晃动,待地标传感器的绿灯闪烁后拿走地标卡并在modbus上查看标地数据显示处现实的数据是否和地标卡上的数据相同,若相同说明地标传感器性能完好,反之则不正常,需进一步排查问题。
83.4.5、外挂件(四合一仪表)的测试
84.将外挂件的四芯线按照线号颜色接在对应的接线端子排上,并在带灯自锁按钮箱上找到相对应的按钮按压使之灯亮后会听见继电器由常闭切换到常开的吸合声音后,打开modbus到对应数据位查看是否有数据,若有数据则说明该外挂件良好,反之则不正常,需进一步排查问题。
85.4.6、无线充电器的测试
86.将无线充电器控制端和受电端的线接在对应的接线端子排上,并在带灯自锁按钮
箱上找到相对应的按钮按压使之灯亮后会听见继电器由常闭切换到常开的吸合声音后,在modbus上查看电池是否在充电状态,若在充电状态,说明该无线充电器正常,反之则不正常,需进一步排查问题。
87.最后说明的是:以上公开的仅为本实用新型的一个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1