一种障碍物探测器的制作方法
1.本实用新型涉及探测器技术领域,特别涉及一种障碍物探测器。
背景技术:
2."巡检机器人"基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,巡检机器人需要配合移动底座进行移动巡检,传统的移动底座依靠视觉进行主动避障,不便于判断障碍物的距离,对于外部的撞击没有任何防护能力,导致巡检机器人容易受伤。
技术实现要素:
3.本实用新型目的是针对上述存在的问题和不足,提出一种障碍物探测器通过减速器带动蜗杆旋转,蜗杆与蜗轮啮合带动移动轴旋转,进而壳体定点移动,激光雷达和毫米波雷达检测前后,判断障碍物与壳体的距离并将信号传输给控制器,超声波雷达配合毫米波雷达和激光雷达对壳体四侧进行检测,便于移动,便于检测障碍物的距离,解决了传统不便于判断距离问题和被动防护能力较弱问题。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种障碍物探测器,包括壳体,所述壳体的顶部外壁安装有旋转组件,且壳体的底部外壁安装有移动结构,所述壳体的两侧外壁中心处均安装有激光雷达,且壳体两侧外壁位于激光雷达两侧处安装有毫米波雷达,所述壳体远离激光雷达的两侧外壁安装有等距离分布的超声波雷达;旋转组件包括开设在壳体顶部外壁的旋转槽、安装在旋转槽底部内壁的旋转盘、转动连接在旋转盘顶部外壁的旋转环和安装在旋转槽中心处的旋转电机。
6.优选的,所述旋转环的内侧外壁安装有锥齿环,且旋转电机输出轴连接有锥齿轮,所述旋转环的顶部外壁安装有安装板,且锥齿轮与锥齿环啮合。
7.优选的,所述安装板的顶部外壁安装有安装柱,且安装柱的顶部开设有升降槽,安装柱位于升降槽中安装有电动推杆,且电动推杆的顶端外壁安装有巡检仪器,所述安装板的顶部外壁一侧安装有控制器;
8.根据上述方案:通过壳体两端的防撞条配合吸能杆对受到的撞击进行吸收,旋转电机通过锥齿路带动旋转环旋转,安装板旋转带动巡检仪器转向,电动推杆提高巡检仪器的高度,便于巡检,便于辅助转向。
9.优选的,所述巡检仪器、激光雷达、毫米波雷达和超声波雷达通过信号线连接控制器信号输入端。
10.优选的,所述移动结构包括等距离转动连接在壳体底部的移动轴、安装在壳体内壁的驱动电机和减速器、连接在减速器输出端的蜗杆、设在移动轴中心处的蜗轮、安装在移动轴两端的履带轮和连接在履带轮外壁的履带;
11.根据上述方案:通过减速器带动蜗杆旋转,蜗杆与蜗轮啮合带动移动轴旋转,进而壳体定点移动,激光雷达和毫米波雷达检测前后,判断障碍物与壳体的距离并将信号传输
给控制器,超声波雷达配合毫米波雷达和激光雷达对壳体四侧进行检测,便于移动,便于检测障碍物的距离。
12.优选的,所述驱动电机输出轴与减速器输入端连接,且蜗杆与蜗轮啮合。
13.优选的,所述壳体的两端外壁两侧均安装有吸能杆,且吸能杆的一端外壁安装有防撞条。
14.优选的,所述驱动电机、电动推杆和旋转电机通过导线连接连接控制器,且控制器通过导线连接电源。
15.本实用新型的有益效果为:
16.1、通过减速器带动蜗杆旋转,蜗杆与蜗轮啮合带动移动轴旋转,进而壳体定点移动,激光雷达和毫米波雷达检测前后,判断障碍物与壳体的距离并将信号传输给控制器,超声波雷达配合毫米波雷达和激光雷达对壳体四侧进行检测,便于移动,便于检测障碍物的距离;
17.2、通过壳体两端的防撞条配合吸能杆对受到的撞击进行吸收,旋转电机通过锥齿路带动旋转环旋转,安装板旋转带动巡检仪器转向,电动推杆提高巡检仪器的高度,便于巡检,便于辅助转向。
附图说明
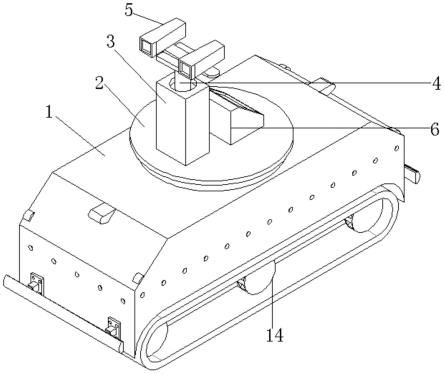
18.图1为本实用新型提出的一种障碍物探测器的整体结构示意图;
19.图2为本实用新型提出的一种障碍物探测器的展开结构示意图;
20.图3为本实用新型提出的一种障碍物探测器的壳体结构示意图;
21.图4为本实用新型提出的一种障碍物探测器的底部部分截面结构示意图。
22.图中:1壳体、2旋转组件、3安装柱、4电动推杆、5巡检仪器、6控制器、7旋转槽、8旋转盘、9旋转环、10锥齿环、11安装板、12旋转电机、13锥齿轮、14移动结构、15激光雷达、16毫米波雷达、17超声波雷达、18吸能杆、19防撞条、20移动轴、21蜗轮、22驱动电机、23减速器、24履带轮、25履带。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
24.实施例1:
25.参照图1和图3-4,一种障碍物探测器,包括壳体1,壳体1的顶部外壁安装有旋转组件2,且壳体1的底部外壁安装有移动结构14,壳体1的两侧外壁中心处均安装有激光雷达15,且壳体1两侧外壁位于激光雷达15两侧处安装有毫米波雷达16,壳体1远离激光雷达15的两侧外壁安装有等距离分布的超声波雷达17,壳体1上的激光雷达15配合、毫米波雷达16与超声波雷达17对壳体1周围进行检测,超声波雷达17对靠近壳体1的物体进行检测,并将信号传输给控制器6,便于判断距离,壳体1两端的激光雷达15和毫米波雷达16配合控制器6判断与物体之间的距离,并将信号传输给控制器6,自动判断与物体的距离,便于检测障碍物;
26.移动结构14包括等距离转动连接在壳体1底部的移动轴20、安装在壳体1内壁的驱动电机22和减速器23、连接在减速器23输出端的蜗杆、设在移动轴20中心处的蜗轮21、安装在移动轴20两端的履带轮24和连接在履带轮24外壁的履带25,驱动电机22配合减速器23驱动移动轴20旋转,移动轴20带动履带25旋转驱动壳体1移动,便于携带巡检仪器5进行移动巡检;
27.驱动电机22输出轴与减速器23输入端连接,且蜗杆与蜗轮21啮合;
28.壳体1的两端外壁两侧均安装有吸能杆18,且吸能杆18的一端外壁安装有防撞条19,壳体1两端的吸能杆18与防撞条19撞击的物体进行缓冲,防撞条19受力后压缩吸能杆18,吸能杆18溃缩对能量进行吸收部分,便于保护壳体1上元件和保护撞击物;
29.驱动电机22、电动推杆4和旋转电机12通过导线连接连接控制器6,且控制器6通过导线连接电源。
30.实施例2:
31.参照图1-3,旋转组件2包括开设在壳体1顶部外壁的旋转槽7、安装在旋转槽7底部内壁的旋转盘8、转动连接在旋转盘8顶部外壁的旋转环9和安装在旋转槽7中心处的旋转电机12;
32.旋转环9的内侧外壁安装有锥齿环10,且旋转电机12输出轴连接有锥齿轮13,旋转环9的顶部外壁安装有安装板11,且锥齿轮13与锥齿环10啮合,旋转电机12通过锥齿轮13和锥齿环10带动旋转环9旋转,旋转环9上的安装板11带动巡检仪器5旋转,便于辅助巡检;
33.安装板11的顶部外壁安装有安装柱3,且安装柱3的顶部开设有升降槽,安装柱3位于升降槽中安装有电动推杆4,且电动推杆4的顶端外壁安装有巡检仪器5,安装板11的顶部外壁一侧安装有控制器6,安装柱3上的电动推杆4启动带动巡检仪器5上下移动,辅助巡检,便于调节巡检仪器5的高度;
34.巡检仪器5、激光雷达15、毫米波雷达16和超声波雷达17通过信号线连接控制器6信号输入端。
35.工作原理:使用时,将巡检机器人巡检所需的元器件安装在巡检仪器5部位,驱动电机22启动,驱动电机22通过减速器23带动蜗杆旋转,蜗杆与蜗轮21啮合后带动移动轴20旋转,移动轴20旋转后带动履带轮24和履带25旋转,进而带动壳体1定点移动,移动过程中,激光雷达15和毫米波雷达16检测前后,判断障碍物与壳体1的距离并将信号传输给控制器6,超声波雷达17配合毫米波雷达16和激光雷达15对壳体1四侧进行检测,壳体1两端的防撞条19配合吸能杆18对受到的撞击进行吸收,保护自身的同时也保护了撞击物,移动过程中旋转电机12启动,旋转电机12通过锥齿路13和旋转环9上的锥齿环10带动旋转环9旋转,旋转环9在旋转盘8上旋转带动安装板11旋转,进而带动安装板11上的巡检仪器5转向,电动推杆4提高巡检仪器5的高度,便于巡检,便于辅助转向。
36.文中参照实施例详细描述了本实用新型的示范性实施方式,然而本领域技术人员可理解的是,在不背离本实用新型理念的前提下,可以对上述具体实施例做出多种变型和改型,且可以对本实用新型提出的各技术特征、结构进行多种组合,而不超出本实用新型的保护范围,本实用新型的保护范围由所附的权利要求确定。前述对本实用新型的具体示例性实施方案的描述并非想将本实用新型限定为所公开的精确形式,并且很显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进行选择和描述的目的在于解释本实用
新型的特定原理及其实际应用,从而使得本领域的技术人员能够实现并利用本实用新型的各种不同的示例性实施方案以及各种不同的选择和改变。本实用新型的范围意在由权利要求书及其等同形式所限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1