一种改进型检测机器人的制作方法
本技术涉及隧道机电设施故障检测,尤其涉及一种改进型检测机器人。
背景技术:
1、路隧道机电工程是高速公路机电工程的一个分部工程,包括通风、照明、消防、监控、低压供配电等子系统,随着社会的发展,隧道机电设施故障检测中常使用检测机器人。
2、现有技术中诸如cn215003685u的实用新型公开了一种检测机器人,包括主体部、支撑机构、视觉传感器、上位机、驱动组件和控制模块,所述驱动组件包括:车轮;设置在车轮的中心的用于驱动车轮运动的第一电机;设置在主体部的左侧壁和第一电机之间以及主体部的右侧壁和第一电机之间的驱动臂;位于主体部的容纳腔室中的用于驱动驱动臂在竖直方向上运动的第二电机,本申请的检测机器人能够利用驱动臂在竖直方向上的运动来调整主体部距离地面的高度,从而允许检测机器人顺利地按照预定路线行驶,避免行驶过程中发生触底的情况。
3、但是在对比较复杂环境的隧道进行机电检测时,机器人会出现与现场物体碰撞的情况发生,造成机器人出现侧翻或局部损坏的情况,易造成机器人无法正常使用的情况,进而需维修人员对检测机器人进行救援,降低检测机器人的实用性。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在机器人会出现与现场物体碰撞并出现损坏的缺点,而提出的一种改进型检测机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:一种改进型检测机器人,包括机器人本体、车轮、支架、红外线探测仪、散热板和防护装置,所述车轮与机器人本体的表面转动连接,所述支架设置在机器人本体的表面,所述红外线探测仪设置在支架的表面,所述散热板设置在机器人本体的表面,所述防护装置设置在机器人本体的表面,所述防护装置包括固定板,所述固定板与机器人本体的表面固定连接,所述固定板的内壁插设连接有卡板。
3、优选的,所述卡板的内壁固定连接有固定弹簧,所述固定弹簧的表面固定连接有定位杆,所述定位杆与固定板的表面插设连接,所述定位杆的表面固定连接拉块。
4、优选的,所述卡板的表面固定连接有套管,所述套管的内壁滑动连接有固定杆,所述固定杆的表面固定连接有抵板。
5、优选的,所述抵板的表面固定连接有伸缩弹簧,所述伸缩弹簧远离抵板的一端与卡板的表面固定连接。
6、优选的,所述机器人本体的表面设置有连接装置,所述连接装置包括安装座,所述安装座的表面开设有放置槽,所述支架的下表面固定连接有底座。
7、优选的,所述底座与放置槽的内壁插设连接,所述底座的内壁固定连接有稳定弹簧,所述稳定弹簧的表面固定连接有连接杆。
8、优选的,所述连接杆的表面固定连接有提杆,所述提杆的两端均固定连接有卡杆,所述卡杆与安装座的表面插设连接。
9、与现有技术相比,本实用新型的优点和积极效果在于:
10、1.本实用新型中,通过设置防护装置,便有对机器人本体进行碰撞缓冲,对此拉动拉块,定位杆相继受力滑入卡板的内壁,固定弹簧相继受力形变后收紧,随即将卡板插入固定板的内壁,随即松开拉块,固定弹簧失去束缚后回弹,定位杆同时受力插入固定板的内壁,当遇见障碍物时抵板受力推动固定杆滑入套管内壁,伸缩弹簧同时受力形变后收紧,机器人本体相继受力停止,通过设置防护装置,便于对机器人本体受到外力撞击时能有效地起到防护作用,避免碰撞导致机器人本体出现侧翻或受损的情况,进而减少维护人员的工作负担,并提高设备的实用性,并有效地提升了设备的稳定性。
11、2.本实用新型中,通过设置连接装置,便于对支架进行快速连接,对此拉动提杆,连接杆相继受力带动稳定弹簧形变后扩张,随即将底座放入放置槽的内壁,随即松开提杆,稳定弹簧相继失去束缚后回弹,卡杆相继受力插入安装座的表面,通过设置连接装置,便于对支架进行快速连接,使其需要对红外线探测仪进行维护时拆卸更加方便快捷,对此有效地提升了设备的易用性。
技术特征:
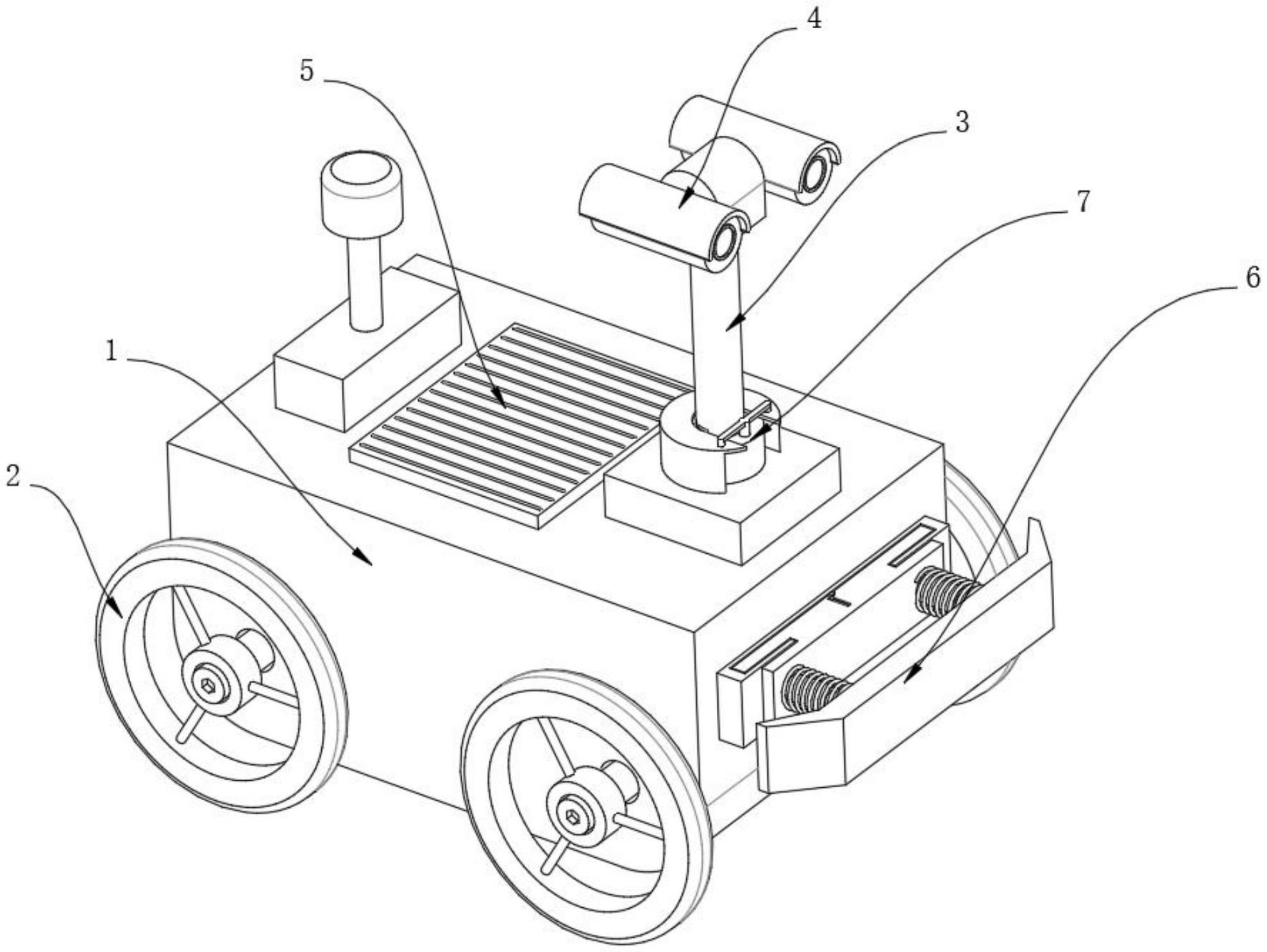
1.一种改进型检测机器人,包括机器人本体(1)、车轮(2)、支架(3)、红外线探测仪(4)、散热板(5)和防护装置(6),其特征在于:所述车轮(2)与机器人本体(1)的表面转动连接,所述支架(3)设置在机器人本体(1)的表面,所述红外线探测仪(4)设置在支架(3)的表面,所述散热板(5)设置在机器人本体(1)的表面,所述防护装置(6)设置在机器人本体(1)的表面,所述防护装置(6)包括固定板(61),所述固定板(61)与机器人本体(1)的表面固定连接,所述固定板(61)的内壁插设连接有卡板(62)。
2.根据权利要求1所述的一种改进型检测机器人,其特征在于:所述卡板(62)的内壁固定连接有固定弹簧(63),所述固定弹簧(63)的表面固定连接有定位杆(64),所述定位杆(64)与固定板(61)的表面插设连接,所述定位杆(64)的表面固定连接拉块(65)。
3.根据权利要求1所述的一种改进型检测机器人,其特征在于:所述卡板(62)的表面固定连接有套管(66),所述套管(66)的内壁滑动连接有固定杆(67),所述固定杆(67)的表面固定连接有抵板(68)。
4.根据权利要求3所述的一种改进型检测机器人,其特征在于:所述抵板(68)的表面固定连接有伸缩弹簧(69),所述伸缩弹簧(69)远离抵板(68)的一端与卡板(62)的表面固定连接。
5.根据权利要求1所述的一种改进型检测机器人,其特征在于:所述机器人本体(1)的表面设置有连接装置(7),所述连接装置(7)包括安装座(71),所述安装座(71)的表面开设有放置槽(72),所述支架(3)的下表面固定连接有底座(73)。
6.根据权利要求5所述的一种改进型检测机器人,其特征在于:所述底座(73)与放置槽(72)的内壁插设连接,所述底座(73)的内壁固定连接有稳定弹簧(74),所述稳定弹簧(74)的表面固定连接有连接杆(75)。
7.根据权利要求6所述的一种改进型检测机器人,其特征在于:所述连接杆(75)的表面固定连接有提杆(76),所述提杆(76)的两端均固定连接有卡杆(77),所述卡杆(77)与安装座(71)的表面插设连接。
技术总结
本技术涉及隧道机电设施故障检测技术领域,具体为一种改进型检测机器人,包括机器人本体、车轮、支架、红外线探测仪、散热板和防护装置,车轮与机器人本体的表面转动连接,支架设置在机器人本体的表面,红外线探测仪设置在支架的表面,散热板设置在机器人本体的表面,防护装置设置在机器人本体的表面,防护装置包括固定板,固定板与机器人本体的表面固定连接,固定板的内壁插设连接有卡板。本技术,通过设置防护装置,便于对机器人本体受到外力撞击时能有效地起到防护作用,避免碰撞导致机器人本体出现侧翻或受损的情况,进而减少维护人员的工作负担,并提高设备的实用性,并有效地提升了设备的稳定性。
技术研发人员:白云恩,刘稳,左传文,孙远,张卓,苏卓,高晓斌,吴志勇,刘志川,王征兵,刘国彦
受保护的技术使用者:中铁一局集团电务工程有限公司
技术研发日:20221209
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!