光电模块、光电编码器、伺服电机以及伺服系统的制作方法
本技术涉及光电编码器,特别涉及一种光电模块、光电编码器、伺服电机以及伺服系统。
背景技术:
1、光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,可以用于在伺服系统中进行相对位置检测或者绝对位置检测,为了实现伺服系统的快速位置响应和快速位置、速度闭环,则需要编码器的位置响应的反馈快速,否则会影响伺服系统的刚性。
2、目前在利用光电编码器进行绝对位置检测时,由于存在光源发光的准直度差异、光源发光面积相对接收阵列的面积较小、小孔光源光束发散以及发光元件与接收模块对准度存在偏差等因素的存在,会导致光电接收阵列的中间接收到的光强较强、两边接收到的光强较弱,因此会导致光电接收阵列输出的信号出现首尾信号幅值和偏置较小,中间信号幅值和偏置较大,亦或中间信号幅值、偏置小,首尾信号幅值、偏置大等问题,为了解决上述问题,目前通常是通过设计繁杂的硬件电路或者使用较高的软件资源来处理这些幅值、偏置不均匀的模拟信号,然而这在时间上会带来较大延迟,使得光电编码器的位置响应的反馈速度较慢,影响伺服系统的响应速度。
技术实现思路
1、本实用新型的主要目的是提出一种光电模块,旨在解决现有的伺服系统响应速度慢的问题。
2、为实现上述目的,本实用新型提出的光电模块,包括:
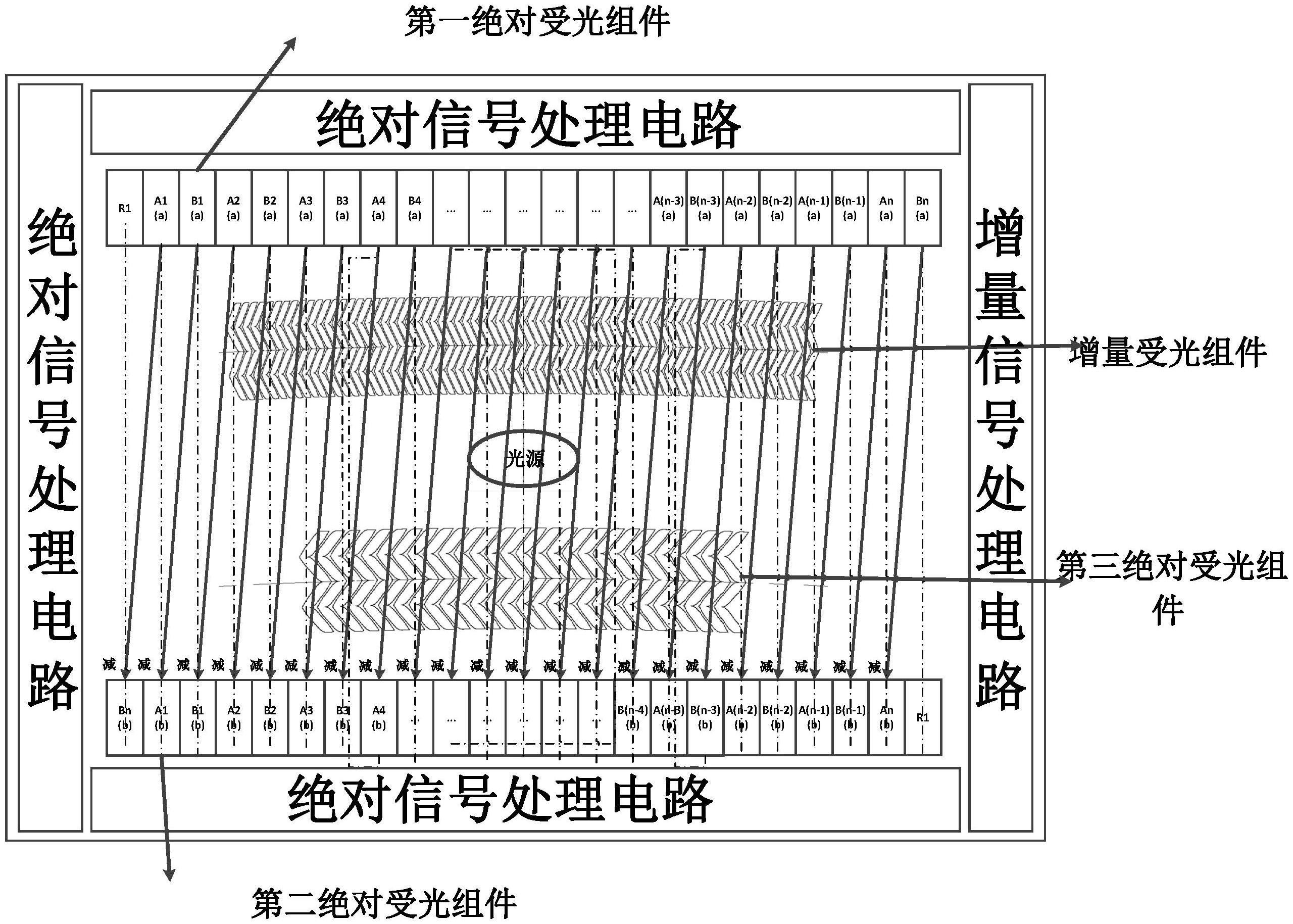
3、第一绝对受光组件,所述第一绝对受光组件由多个第一受光元件和第二受光元件沿测定方向交替配置而成,用于接收从光源射出并在第一绝对图案处透过或者反射的光,所述第一受光元件用于输出第一相位的第一绝对光电信号,所述第二受光元件用于输出第二相位的第二绝对光电信号;
4、第二绝对受光组件,所述第二绝对受光组件由多个第三受光元件和第四受光元件沿测定方向交替配置而成,用于接收从所述光源射出并在第二绝对图案处透过或者反射的光,所述第三受光元件用于输出第三相位的第三绝对光电信号,所述第四受光元件用于输出第四相位的第四绝对光电信号;
5、绝对信号耦合部,用于对所述第一相位的第一绝对光电信号和第三相位的第三绝对光电信号进行减法耦合得到第一绝对角度信号,并对所述第二相位的第二绝对光电信号和第四相位的第四绝对光电信号进行减法耦合得到第二绝对角度信号,所述第一绝对角度信号和所述第二绝对角度信号用于解算绝对位置测量信号。
6、可选地,所述第一绝对图案与所述第二绝对图案之间具有相位差;或者,所述第一绝对图案与所述第二绝对图案对齐设置。
7、可选地,所述绝对信号耦合部包括第一绝对信号处理电路,所述第一绝对信号处理电路耦合连接所述第一受光元件和所述第三受光元件,所述第一绝对信号处理电路包括:
8、第一信号放大器,所述第一信号放大器的输入端与所述第一受光元件的输出端相连,用于对所述第一受光元件输出的第一相位的第一绝对光电信号进行放大,以输出第一放大信号;
9、第二信号放大器,所述第二信号放大器的输入端与所述第三受光元件的输出端相连,用于对所述第三受光元件输出的第三相位的第三绝对光电信号进行放大,以输出第二放大信号;
10、第一减法电路,所述第一减法电路的输入端分别与所述第一信号放大器和第二信号放大器的输出端电性连接,所述第一减法电路用于对接收的所述第一放大信号和所述第二放大信号进行减法运算,输出第一绝对角度信号。
11、可选地,所述第一减法电路包括:
12、第一偏置电路,所述第一偏置电路的输出端连接于第一减法器的第一输入端,用于向第一减法器输入第一偏置电压信号;
13、第一减法器,所述第一减法器的第一输入端与所述第一信号放大器的输出端电性连接,所述第一减法器的第二输入端与所述第二信号放大器的输出端电性连接,用于基于所述第一偏置电压信号对所述第一放大信号和所述第二放大信号进行减法运算,生成第一减法运算结果信号;
14、第一比较器,所述第一比较器用于将所述第一减法运算结果信号与参考电平信号进行比较,输出第一绝对角度信号,其中,所述参考电平信号与所述第一偏置电压信号幅值相同。
15、可选地,所述绝对信号耦合部包括第二绝对信号处理电路,所述第二绝对信号处理电路耦合连接所述第二受光元件和所述第四受光元件,所述第二绝对信号处理电路包括:
16、第三信号放大器,所述第三信号放大器的输入端与所述第二受光元件的输出端相连,用于对所述第二受光元件输出的第二相位的第二绝对光电信号进行放大,以输出第三放大信号;
17、第四信号放大器,所述第四信号放大器的输入端与所述第四受光元件的输出端相连,用于对所述第四受光元件输出的第四相位的第四绝对光电信号进行放大,以输出第四放大信号;
18、第二减法电路,所述第二减法电路的输入端分别与所述第三信号放大器和第四信号放大器的输出端电性连接,所述第二减法电路用于对接收的所述第三放大信号和所述第四放大信号进行减法运算,输出第二绝对角度信号。
19、可选地,所述第二减法电路包括:
20、第二偏置电路,所述第二偏置电路的输出端连接于第二减法器的第一输入端,用于向第二减法器输入第二偏置电压信号;
21、第二减法器,所述第二减法器的第一输入端连接于所述第三信号放大器的输出端,所述第二减法器的第二输入端连接于所述第四信号放大器的输出端,用于根据所述第二偏置电压信号,对所述第三放大信号和所述第四放大信号进行减法运算并施加偏置电压,生成第二减法运算结果信号;
22、第二比较器,所述第二比较器用于将所述第二减法运算结果信号以及与所述第二偏置电压信号幅值相同的偏置信号进行比较,输出第二绝对角度信号。
23、可选地,所述光电模块还包括第三绝对受光组件和第三绝对信号处理部,
24、第三绝对受光组件由多个第五受光元件沿测定方向配置而成,用于接收反射或透过第三绝对图案的光,所述第三绝对受光组件用于输出第五相位的参考绝对光电信号;
25、所述第三绝对信号处理部,用于基于所述参考绝对光电信号确定参考绝对角度信号;
26、其中,所述参考绝对角度信号用于指示选择所述第一绝对角度信号和所述第二绝对角度信号中的一个解算所述绝对位置测量信号。
27、可选地,所述光电模块还包括增量受光组件和增量信号处理部;
28、所述增量受光组件由多个第六受光元件沿测定方向配置而成,用于接收从光源射出并在增量图案处反射或者透射出的光,不同预设位置的第六受光元件用于分别向增量信号处理部输出第五相位的第一增量光电信号、第六相位的第二增量光电信号、第七相位的第三增量光电信号和第八相位的第四增量光电信号;
29、所述增量信号处理部耦合连接预设第一位置的第六受光元件和预设第三位置的第六受光元件,以及耦合连接预设第二位置的第六受光元件和预设第四位置的第六受光元件,用于对所述第五相位的第一增量光电信号和所述第七相位的第三增量光电信号进行差分处理得到第一增量信号,并对所述第六相位的第二增量光电信号和所述第八相位的第四增量光电信号进行差分处理得到第二增量信号,所述第一增量信号和所述第二增量信号用于解算相对位置测量信号。
30、可选地,所述增量信号处理部包括第一增量信号处理电路及第二增量信号处理电路;
31、所述第一增量信号处理电路耦合连接预设第一位置的第五受光元件和预设第三位置的第五受光元件,用于对接收的所述预设第一位置的第五受光元件输出的第五相位的第一增量光电信号,以及所述预设第三位置的第五受光元件输出第七相位的第三增量光电信号进行信号处理,以输出第一增量信号;
32、所述第二增量信号处理电路耦合连接预设第二位置的第六受光元件和预设第四位置的第八受光元件,用于对接收的所述预设第二位置的第六受光元件输出的第六相位的第二增量光电信号,以及所述预设第四位置的第六受光元件输出的第八相位的第四增量光电信号进行信号处理,以输出第二增量信号。
33、可选地,所述第一绝对受光组件与所述第二绝对受光组件错开至少一位设置。
34、本实用新型还提出一种光电编码器,所述光电编码器包括:
35、狭缝部,所述狭缝部具有沿测定方向排布分第一绝对图案和第二绝对图案;
36、以及,如上述的光电模块,所述狭缝部与所述光电模块相对设置。
37、本实用新型还提出一种伺服电机,所述伺服电机包括:
38、转子相对于定子旋转的旋转型电机,或者动子相对于定子移动的直线电机;以及
39、如上述的光电编码器,用于检测所述转子或者所述动子的位置、速度以及加速度中的至少一个。
40、本实用新型还提出一种伺服系统,其特征在于,所述伺服系统包括:
41、转子相对于定子旋转的旋转型电机,或者动子相对于定子移动的直线电机;
42、如上述的光电编码器,其检测所述转子或者所述动子的位置、速度以及加速度中的至少一个;以及
43、控制装置,用于根据所述光电编码器的检测结果,控制所述旋转型电机或所述直线电机。
44、本实用新型技术方案,通过设置第一绝对受光组件、第二绝对受光组件和绝对信号耦合部组成了光电模块,基于该光电模块,本实用新型可以利用第一绝对受光组件采集第一相位的第一绝对光电信号以及第二相位的第二绝对光电信号,利用第二绝对受光组件采集第三相位的第三绝对光电信号以及第四相位的第四绝对光电信号,进而利用绝对信号耦合部对所述第一相位的第一绝对光电信号和第三相位的第三绝对光电信号进行简单地减法耦合,即可得到第一绝对角度信号,以及利用绝对信号耦合部对所述第二相位的第二绝对光电信号和第四相位的第四绝对光电信号进行简单地减法耦合,即可得到第二绝对角度信号,再基于所述第一绝对角度信号和所述第二绝对角度信号,即可解算出绝对位置测量信号,由于本实用新型中减法耦合过程简单、高效,无需设计繁杂的硬件电路或者利用较高的软件资源来进行绝对位置检测,有利于实现光电编码器后级软硬件对前端光电信号的快速处理,所带来的时间延迟低,从而可以实现快速位置反馈,提升伺服系统的响应速度。
- 还没有人留言评论。精彩留言会获得点赞!