用于对螺纹进行光学测量的方法和装置与流程
本发明涉及一种借助紧固在操纵器上的并且相对于金属管件可自由定位的至少一个测量头对金属管件的至少一个端部处的螺纹进行光学测量的方法。本发明还涉及一种用于对螺纹进行光学测量、特别是用于执行所述方法的装置。
背景技术:
1、用于输送加压流体(例如天然气或石油)并以抗压且气密和液密地彼此螺纹连接的管件的螺纹受到严格的密封性要求。在这种石油专用管材(octg,oil country tubulargoods)作为用于石油或天然气勘探井的套管或立管、或者用于天然气或石油输送管路的情况下,通常使用具有底切的螺纹牙侧面的锥形螺纹。在管件的端侧,密封唇通常联接至螺纹。螺纹和密封唇都必须满足最高的精度要求。在现有技术中,基本已知对螺纹进行光学测量,以便对管件做质量控制。
2、例如由专利文献wo 2019/09371a1已知用于对管件的外螺纹轮廓进行光学测量的方法和装置。所述装置包括用于待测管件的支具和具有至少一个测量设施的光学测量单元,其包括光源和布置在光源的光路中的、用于记录外螺纹轮廓的阴影图像的摄像机,其中,光学测量单元刚性地布置在保持成能够围绕三个空间轴线枢转的支撑元件上,其中,光学测量单元还具有至少两个测量装置,它们的光路彼此相交。所述方法包括:将待测管件布置在支具上,使得空间轴线横向于测量单元的测量平面伸延,并且外螺纹布置在光源和分配的摄像机之间的光路中;将测量单元取向成使得测量平面与空间轴线围成直角;借助于至少一个测量设施的摄像机记录外螺纹的阴影图像;以及评估阴影图像。
3、例如由专利文献ep 3 465 079 b1已知用于测量螺纹的另一种装。该装置包括:用于可释放地保持管件的保持器,其中,螺纹形成在管件的端部处;具有第一光学传感器的第一光学测量区,其中,第一光学测量区安装至装置的操纵器,该操纵器设立成使第一测量区相对于管件运动,并且其中,第一光学测量区能够围绕第一调整轴线相对于螺纹的螺纹轴线调整,其中,在操纵器处布置有装置的具有第二光学传感器的第二光学测量区,其中,光学测量区共同形成用于同时测量螺纹的对置侧的测量通道。装置的特征尤其在于,借助于操纵器,测量通道能够围绕至少一个第二调整轴线相对于螺纹轴线倾斜,使得测量通道能够在立体角区间内自由取向。
4、由专利文献de 10 2007 017 747 a1已知对管件端部处的外螺纹轮廓进行光学测量方法和装置,其中,预先在生产线中以节拍的方式产生螺纹,并且在进一步加工之前在生产线中对螺纹从头到尾连续地进行测量。通过在管件和至少一个光学测量单元之间由旋转和平移组成的相对运动与管件横截面相切地照明、更确切地说扫描先前产生的螺纹的轮廓,所述光学测量单元由布置在背光中的照明器和摄像机组成。
5、由专利文献ep 2 259 015 b1已知进一步的现有技术,该专利文献描述了管件螺纹的触觉测量和光学测量的组合。
6、最后,由专利文献ep 2 799 809 b1已知用于清洁并且随后测量螺纹的牙侧面的方法。
7、在测量螺纹时,通常将待测量的金属管件置于如下测量位置中,在该测量位置中螺纹在空间中的方位没有确切地限定。这也是由于待测量的管件相对于直线度存在公差,或者若管件在整个长度上没有通过支具支撑则管件端部会由于重力而下垂。这会损害测量的准确性和可再现性。
技术实现思路
1、因此,本发明基于的目的是,提供一种用于光学式螺纹测量的方法和装置,其在测量结果的准确性和再现性方面得到改进。此外,根据本发明的方法和装置应当可以容易且精准地适应测量具有不同直径的金属管件上的不同螺纹。
2、所述目的通过具有权利要求1的特征的方法来实现。所述目的还通过具有权利要求10的特征的装置来实现。根据本发明的方法和装置的有利的设计方案由从属权利要求给出。
3、根据本发明的第一着眼点提出了一种方法,在该方法中测量头可以相对于金属管件自由定位并且测量头具有至少一个光学测量区以及至少一个位置检测器,其中,所述方法至少包括以下方法步骤:
4、a)在测量位置中提供金属管件;
5、b)在测量头靠近金属管件之前和/或期间借助所述至少一个位置检测器确定金属管件的纵向轴线的空间位置;
6、c)在测量部位中定位测量头之前和/或期间将测量头平行于金属管件的纵向轴线取向;以及
7、d)执行光学螺纹测量。
8、上面罗列的方法特征a)至d)优选地按照其罗列的顺序执行,其中,方法步骤b)和c)的顺序可以互换。
9、优选地,所述至少一个位置检测器以如下方式布置在测量头上,使得当测量头靠近待测量的螺纹或待测量的金属管件时,该位置检测器关于测量头经过的调节路径朝待测量的金属管件的方向布置在测量头的前端处。通过这种方式,测量头还可以在靠近螺纹期间取向为平行于金属管件的纵向轴线,例如通过相应地控制其上紧固有测量头的操纵器。
10、在根据本发明的方法的优选的变型方案中提出了另一方法步骤,其包括在测量部位中以关于金属管件的纵向轴线特定的且给定的角度和/或以特定的轴向位置对测量头和/或测量头的测量区进行精确取向。
11、优选地设置至少一个光学测量器件来作为位置检测器,所述光学测量器件尤其是第一线性激光器,其优选地与金属管件的纵向轴线的目标走向或与测量头的预设线性调整取向成呈直角。
12、在根据本发明的方法的另一适宜且优选的变型方案中规定,通过使用测量头上的至少一个第二线性激光器来执行确定金属管件的纵向轴线的空间位置和/或使测量头和/或所述至少一个光学测量区精确取向,所述第二线性激光器取向成平行于金属管件的纵向轴线的目标走向。
13、所述测量头原则上还可以包括第三线性激光器或光切传感器,其设置用于测量螺纹的螺纹牙侧面或牙侧角。
14、此外,可以规定,例如在将测量头定位到测量位置期间测量和/或计算金属管件的直径。金属管件的直径可以直接地、例如借助测量头的光学测量区来求取。
15、在根据本发明的方法的另一有利的变型方案中规定,在测量头旋转期间在金属管件的纵向轴线的预设目标走向上求取金属管件的圆度。由于例如在加工中心中的螺纹切削过程,待加工的金属管件在加工过程之后可能不圆或者具有部分呈椭圆形的外轮廓。根据本发明,可以在测量头围绕金属管件的纵向轴线旋转特定角度期间求取金属管件的这种不圆度,例如要么借助至少一个线性激光器并且/或者借助至少一个光学测量区。
16、在根据本发明的方法的变型方案中规定,在测量头围绕金属管件的纵向轴线的目标走向旋转至少180°期间,借助至少一个、优选地借助两个光学测量区来测量在金属管件的圆周上实际螺纹深度与目标螺纹深度的偏差。当测量头围绕金属管件的纵向轴线的目标走向旋转约180°时,可以借助彼此对置布置的两个光学测量区产生总共360°的螺纹扫描。
17、由金属管件的圆周上的螺纹深度的偏差也可以计算金属管件的纵向轴线的实际走向与金属管件的纵向轴线的目标走向的角度偏移。
18、测量头和/或测量区可以调节,以便将测量头和/或测量区相对于载体的精确取向,所述载体可以紧固在操纵器的自由端。优选地,首先通过相应地控制操纵器来将测量头定位到测量部位中,所述操纵器例如构造为具有可以在多个自由度上运动的关节臂机构的工业机器人。优选地通过相对于载体调整测量头来执行测量头更确切地说光学测量区的精对准,其中,所述测量头相对于载体优选地既可以线性调整又可以摆动。所述测量头优选地可以围绕大致垂直于金属管件的纵向轴线的目标走向延伸的轴线摆动。
19、在根据本发明的方法的一种特别有利的变型方案中规定,所述测量头具有两个测量区,这两个测量区优选地大致平行并且彼此间隔一定距离地延伸,其距离可以关于金属管件的纵向轴线调整,其中,所述距离优选地根据金属管件的所求取和/或所计算的直径自动调整。通过这种方式,可以特别容易地实现针对不同的管件直径来校准根据本发明的装置。所述校准可以例如根据布置在测量站中的试件来进行。
20、另一方法步骤优选地包括围绕垂直于金属管件的纵向轴线的目标走向的轴线手动和/或自动地调整至少一个光学测量区,以便使测量头适应给定的螺纹升角。
21、此外,在将测量头定位到测量位置中时,优选地提供关于金属管件的直径和位置的碰撞识别,若检测到测量头可能与金属管件碰撞,则碰撞识别阻止测量头和/或操纵器的进一步运动。由此可以防止敏感的测量电子器件通过冲击引起的力受到损坏。
22、最后,在根据本发明的方法的一种变型方案中,设置了对至少一个光学测量区的污染的识别,该识别优选地是自动的。根据检测到的污染程度,可以要么启动清洁过程或要么功能性地中断测量过程。如果例如传感器或光源的玻璃罩的污染程度增加,则可以通过相应的传感器以所谓灰度识别的形式求取变模糊程度。在该方法中规定,定期地自动清洁玻璃罩、例如气动式地清洁。根据污染程度,可以引入附加的清洁过程。一旦达到预设的污染程度,就无法再可靠地执行测量。在这种情况下取消测量过程是有意义的。测量区的光学传感器可以例如设计为ccd传感器或cmos传感器。
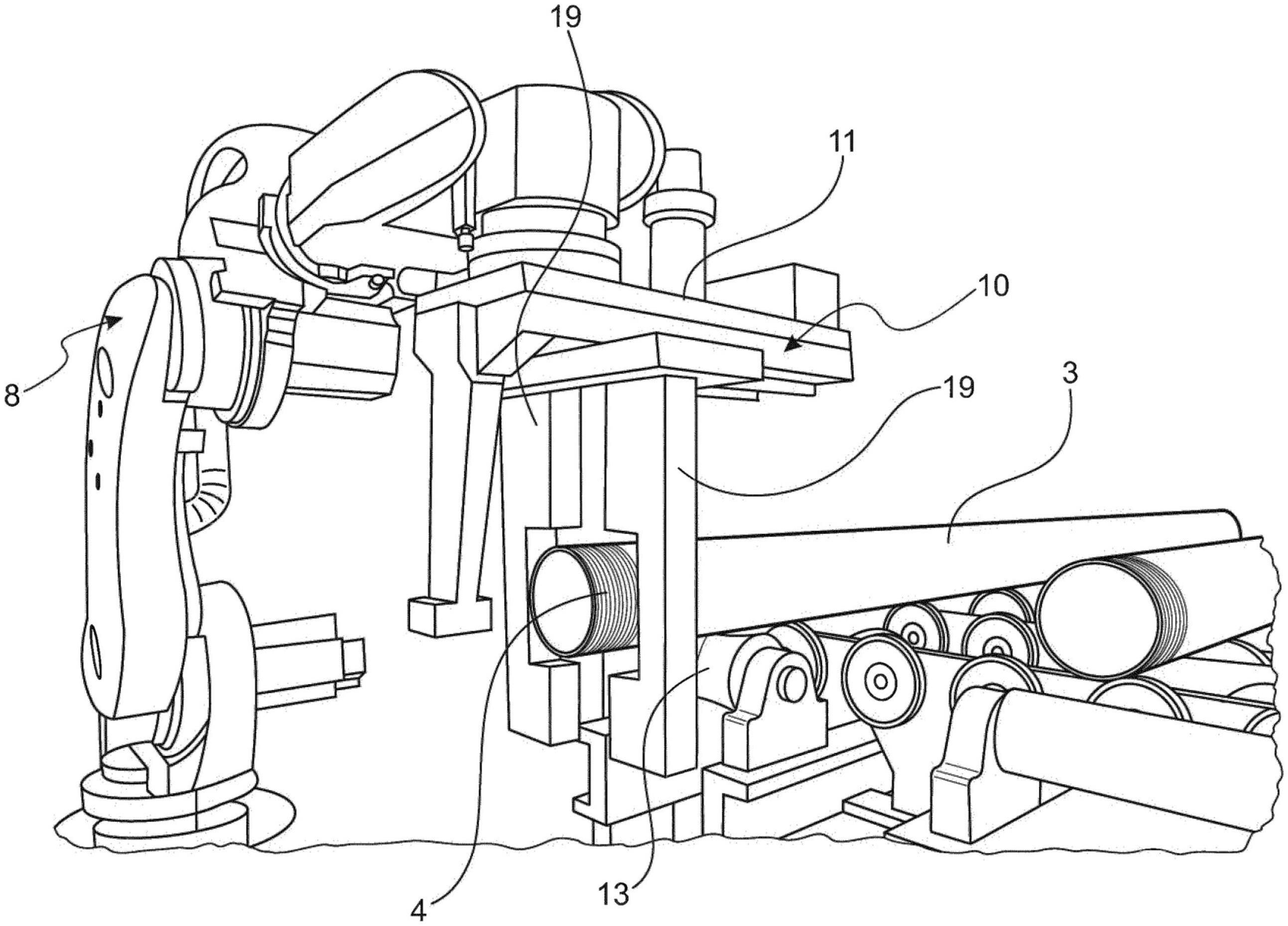
23、本发明的另一着眼点涉及一种用于对金属管件的至少一端上的螺纹进行光学测量的装置,特别是用于执行上述方法的装置。所述装置可以包括至少一个测量头,所述测量头在操纵器上受到引导地能相对于金属管件自由定位,所述测量头具有用于测量螺纹的至少一个光学测量区以及至少一个位置检测器,其中,所述测量头相对于紧固在操纵器的载体可以线性调整和/或围绕一轴线可摆动地紧固,并且所述至少一个光学测量区大致垂直于所述测量头的线性调整路径地延伸,其中,所述装置还包括用于在测量部位中调校和/或校准测量头和/或测量头的测量区的器件。
24、可以例如设置至少一个线性驱动器和/或至少一个旋转驱动器作为用于调校和/或校准测量头的器件,所述器件可以相应地由控制设备控制。
25、适宜地,设置具有带有多个自由度的关节臂的工业机器人作为操纵器。
26、可以设置至少一个第一线性激光器作为位置检测器,其与测量头的线性调整路径大致成直角地延伸。
27、优选地设置至少一个碰撞检测器,若测量头或测量头的部件有与金属管件碰撞的风险,则所述碰撞检测器阻止测量头的调整和/或操纵器的运动。所述位置检测器的线性激光器中的至少一个线性激光器也可以同时满足作为碰撞检测器的功能性。
28、所述测量头适宜地包括至少一个第一光学测量区和第二光学测量区,这些光学测量区分别大致垂直于测量头的线性调整路径地延伸。所述测量头可以例如具有彼此间隔一定距离布置的并且可以相对于彼此调整的至少两个腿部,在这些腿部中分别设置有至少一个光学传感器和与其间隔一定距离布置的至少一个光源,它们分别形成光学测量区。一测量区的光学传感器可以例如构造为cmos传感器或ccd传感器并且具有远心光学器件。
29、光学传感器和光源之间的光路不一定必须沿直线延伸,相反,还可以借助至少一个镜子来偏转该光路。由此可以实现测量头的相对紧凑的构造方式。特别地,可以由此减小各测量区距管件的纵向轴线的距离,并且因此可以减小围绕金属管件的纵向轴线的旋转半径。
30、优选地,光学测量区中的至少一个光学测量区、更确切地说测量头的腿部中的至少一个腿部可以相对于相应的其他测量区横向于测量头的线性调整路径摆动。通过这种方式,可以实现将测量头、更确切地说测量区的位置优选地自动地调整到和/或适应不同的螺纹升角。
- 还没有人留言评论。精彩留言会获得点赞!