包括永磁体的非接触式位置传感器的制作方法
本发明涉及用于绝对角度或线性位置精确测量的非接触式磁和/或电磁位置传感器领域。此类传感器使得能够以相当于总行程的0.1%,即,对于在完整旋转上执行的检测<0.5°的高精度来检测角度位置或线性位移。在现有技术中,用于对参考点(相对于固定点围绕轴线成角度(或线性)地运动)的角度(或线性)位置进行磁测量的设备是已知的。这样的测量设备通常包括旋转的磁元件(或磁阻元件-emc)和测量磁通量或该磁通量(或磁场)的轴向分量和/或径向分量的磁敏元件(ems),由此通过计算推导出敏感的磁元件相对于参考点的角度位置。“360°霍尔效应传感器”类型或“正余弦霍尔效应传感器”类型的第一传感器解决方案使用测量磁场的至少两个分量的单一探头,或使用一个在偏移期间生成通量比例变化的磁路。这种测量设备的精度是有限的(通常≥1°机械),并且可能被认为对某些应用(例如用于机器人)是不够的。使用至少两个霍尔效应探头的同一类型的传感器使得有可能提高这种测量设备的精度(特别是通过不同的场分量的结合),但该精度仍然接近0.5°机械度,并且可能仍然被认为对某些应用(例如机床)是不够的。另一系列带有绕组定子的铁磁类型传感器,通常被称为旋转变压器(例如,磁阻旋转变压器),使用分布在定子部分上的磁发射器和接收器线圈系统。这些旋转变压器的准确度非常高,但它们在应用中被描述为笨重、昂贵并且组装复杂。它们被广泛用于工业(例如机床)和汽车工业(动力转向、变速器),但仍然限于少数高端应用。第三系列传感器使用若干磁道(每个磁道都具有给定的磁化轮廓或磁通量),通常在它们之间进行索引。“nonius”或“游标效应”类型的传感器是第三系列中的一部分,其中两个轨道上的磁极对数不同,从而在用于指定角度(或线性)位置的磁信号中生成相移。在该系列中已知的还有能够产生数字信号的多极“编码器”类型的传感器,这些传感器被组合在一起,使得能够确定相对或绝对的角度位置,或者将“360°霍尔效应传感器”和“编码器”类型的数字传感器关联在一起的组合传感器,使得能够将一次完整旋转的粗略模拟测量结果与大量的数字信号相组合,使得可以经由专用算法局部细化该测量结果,从而能够计算出精确的角度值。这些传感器(或编码器)非常精确(<0.5°),比旋转变压器更紧凑,但它们需要使用至少2个磁轨(或emc),并且每磁轨至少一个磁探头(或ems)。这些传感器被描述为比仅包括单一emc的传感器更昂贵,组装更复杂。它们的使用通常限于卫星、机床、装配机器人和医疗机器人中的高精度定位技术。
背景技术:
0、现有技术
1、同样已知的是法国专利fr2923903,它描述了一种角度或线性磁位置传感器,该传感器包括由至少一个磁体组成的移动元件,该磁体的磁化方向在由运动方向和法线方向定义的表面上沿磁体运动方向线性变化、至少四个磁敏元件和根据移动元件的绝对位置提供信号的至少一个处理电路,其中第一组磁敏元件由位于同一点、在空间上与第二组磁敏元件偏移的一对磁敏元件组成,第二组磁敏元件也由位于同一点、在磁体的运动方向上的一对磁敏元件组成。第一组磁敏元件和第二组磁敏元件中的磁敏元件能够测量磁场的切向分量,并且第一组磁敏元件和第二组磁敏元件中的磁敏元件能够测量磁场的法向分量。处理电路能够产生至少两个代数组合,每个代数组合包括第一组磁敏元件的分量和第二组磁敏元件的分量,从而确定两个实质上电移相90°的正弦信号。
2、专利fr2919385还描述了一种实现两个非接触式360°传感器来产生绝对多圈传感器的解决方案。第一非接触式传感器用于测量旋转构件从0°到360°的旋转角,第二传感器用于确定旋转构件的完整旋转次数。在两个传感器之间集成了连续齿轮减速比n的机械系统。减速器的输入轴与第一传感器相连,第二传感器的转子与减速器的输出轴相连。每当第一传感器转一整圈,第二传感器只转1/n圈。第二传感器使得能够以有限的精度和分辨率获得总绝对角的测量结果,但第一传感器通过细化第二传感器的测量结果解决了这个问题,从而在360°范围内获得非常精确的精度和分辨率。此外,在第一传感器失效的情况下,第二传感器甚至能够检测到(n倍的分辨率降低)旋转构件在旋转过程中的位置,并检测到第一传感器的故障情况。
3、专利fr2898189描述了使用相对于彼此可移动的至少一个永磁体和至少一个磁敏元件的线性或曲线旋转运动磁传感器的另一种解决方案,其特征在于,磁体具有磁化方向,该磁化方向在由所述运动方向和法线方向定义的表面上沿磁体的运动方向基本呈线性变化,在旋转传感器的情况下,排除了径向磁化。
4、专利ep2711663描述了另一盘形解决方案,其具有可以绕轴线(z)旋转移动的点(p)。第一传感器和与盘一体的第一磁元件协作,以测量点(p)相对于原点(o)的近似角度位置(θa)。第二磁元件在盘的外围周向布置。第二传感器被布置在原点(o),以针对与该第二传感器相对定位的第二磁元件,测量该第二磁元件的上游端相对于原点(o)的角度位置。装置根据近似角度位置(θa)确定哪个第二元件与第二传感器相对定位。装置根据所确定的第二元件和第二传感器测量结果来计算参考点(p)的精确角度位置(θ)。
5、现有技术的缺点
6、最简单的现有技术磁传感器不能获得足够的角度(或线性)精度来成功地用于需要高精度定位的应用中。
技术实现思路
1、本发明的目的是通过提供一种简单而廉价的磁测量角度或线性位置的设备来弥补这一主要缺陷。就其最一般的意义而言,本发明涉及一种非接触式的位置传感器,该非接触式位置传感器包括生成磁场的永磁体(或磁编码元件)以及在至少两个方向上所述磁场的至少一个检测元件(或磁敏元件),该永磁体能够在运动方向上运动,并且具有沿着运动方向连续可变的磁化,其特征在于,所述磁化的变化根据不同的场分量呈现与至少两个(准)周期性贡献的组合相对应的形状,该传感器还包括用于组合这些场分量的值并确定精确位置值的计算机。
2、术语“准周期性”是指周期性组合的泛化,其模式从一个周期到另一个周期具有微小的变化,但各个模式的间隔是恒定的。
3、可选地,检测元件可以放置在通量集中器中。
4、有利的是,所述的磁化根据不同的场分量、根据至少两个周期性贡献的组合相对应的形状而变化,所述至少两个周期性贡献是根据不同的周期p和n*p(实数n>0,在位移中恒定或可变)的,第二模式是携载第一模式的载波信号,这种双模式使得能够组合粗略测量结果和经由测量磁场的至少两个分量进行的偏移中的位置的精确测量结果。
5、有利的是,载波和被携载信号彼此索引,以产生与所执行的偏移成比例的相移。
6、根据特定实施例,所述载波和被携载信号是非周期性的。
7、优选的是,磁化具有至少一个磁异常,以检测机械的完整旋转或偏移中的给定位置。
8、根据一个变体,所述磁化的变化具有与三个周期性变化的组合相对应的形状,周期为m*p的第三模式(实数m>0,在位移中恒定或可变),使得能够例如检测机械的完整旋转的数量或偏移中的一个或更多个给定位置。
9、根据一个变体,所述永磁体(或磁强制元件)包括至少一个多极永磁体或多极磁体组件。
10、根据一个变体,所述永磁体是电动机、发电机、致动器、减速器或耦合器的转子的全部或部分。
11、有利的是,所述永磁体包括一组电流回路。
12、根据一种变体,所述磁化的变化具有与多个周期性或准周期性变化的组合相对应的形状,使得能够在偏移中执行精确检测位置,以获知所产生的偏移的数量,并加强测量的精度及其对外部干扰(例如,杂散磁场)的抵御能力。
13、有利的是,所述磁敏元件包括测量至少两个磁场分量方向的至少一个霍尔探头,或磁敏元件的准点组件。
14、根据一个另选方案,所述磁敏元件包括磁阻探头。
15、根据另一另选方案,所述磁敏元件是涡流探头。
16、根据另一另选方案,所述磁敏元件包括多个探头。
17、根据特定实施例,该传感器还包括用于计算和存储计算的角度值和/或传感器的线性的装置。
18、根据特定实施例,本发明所述的测量设备组合磁场分量的模拟检测和数字检测,例如,以节省计算时间。
19、可选地,该设备在所述场分量中的一者失效的情况下具有降级的操作模式(所述场分量的组合),或者使得能够补偿外部源的测量干扰的操作模式(所述场分量的组合)。
20、本发明还涉及一种测量设备,包括用于计算和存储计算的角度值和/或传感器的线性的装置。
21、本发明还涉及上述位置传感器或附加值的测量结果在复杂系统上的应用,所述附加值包括力、扭矩、加速度、制动、相移、总速度、运动方向、旋转次数、惯性、不平衡、振动、噪声、谐波含量、温度、压力、电流、电压。
22、具体非限制性实施方式
23、通过阅读以下关于附图所示的非限制性示例性实施例的描述,将更好地理解本发明,其中:
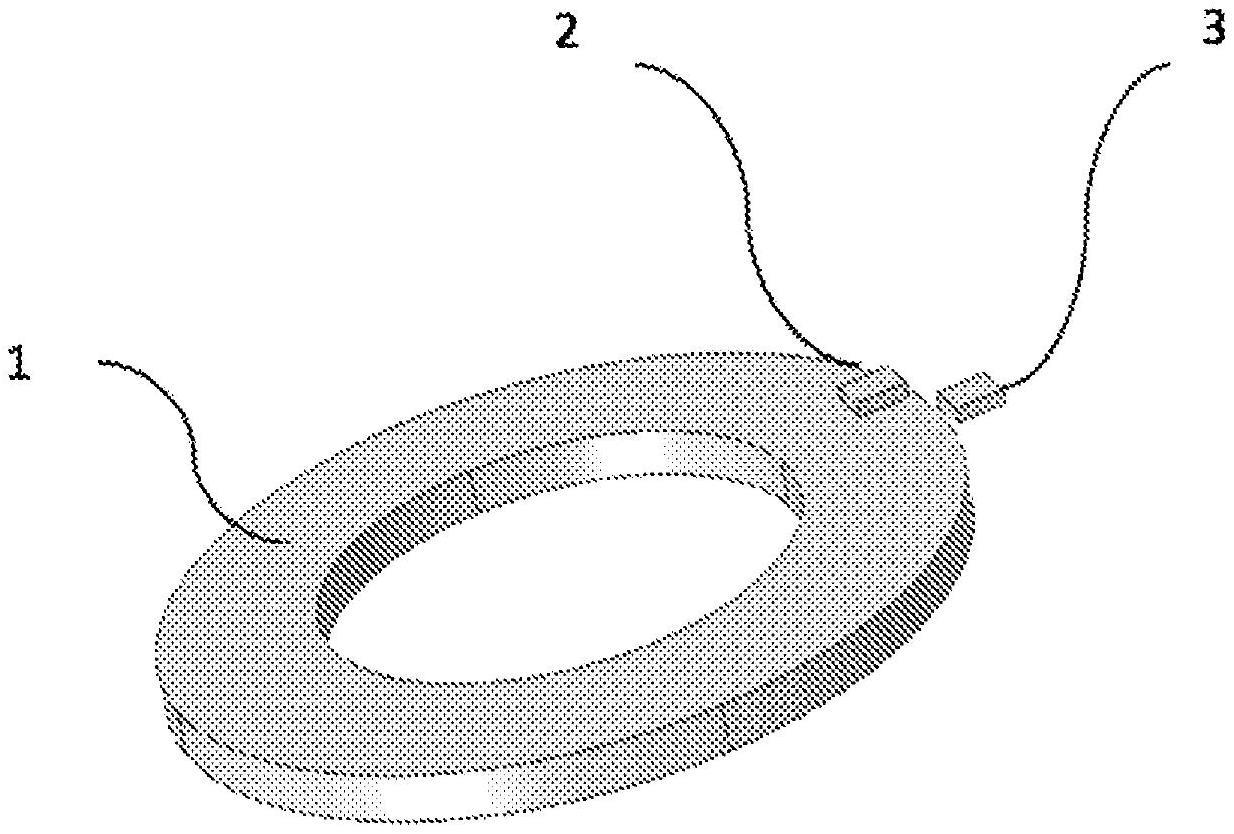
24、[图1]图1示出了根据本发明的角度位置传感器的示意图。
25、[图2]图2示出了根据本发明的示例磁化轮廓。
26、[图3]图3示出了由测量探头测量的磁场分量的变化曲线。
27、[图4]图4示出了由测量探头测量的磁场分量的变化曲线和包络信号的平均值。
28、[图5]图5示出了精确信号分量的变化曲线,该精确信号分量包括相移了四分之一周期p的p个增量。
29、[图6]图6示出了信号brad和信号btan的变化曲线,以及这些信号的示例组合,以用于“粗略”确定偏移上的角度值(atan)。
30、[图7]图7示出了从分量bz和btan得出的在p个增量处的信号的变化曲线,以及这些信号的示例组合,以用于“精确”确定偏移上的角度值(atan)。
31、[图8]图8示出了根据本发明的磁化轮廓的第二示例以及由红线指示的位置测量结果的描述。
32、[图9]图9示出了根据本发明的磁化轮廓的第三示例,经过调整,n'=2,p'=32且t'=0。
33、[图10]图10示出了根据本发明的磁化轮廓的第四示例,经过调整,n”=2,p”=82且t”=0。
34、[图11]图11示出了根据本发明的磁化轮廓的第五示例,经过调整,n=8,p=32且t=0。
35、[图12]图12示出了适用于曲线位移的检测原理。
36、[图13]图13示出了适用于直线位移的检测原理。
37、根据本发明的示例角度传感器的机械结构
38、图1示出了根据本发明的旋转传感器结构。由盘形永磁体(1)生成的磁通量在其外围被一个或两个径向或轴向定位的检测元件(2、3)收集,该检测元件沿两个正交轴线测量磁感应的两个分量,如果有必要的话,通过定义气隙的磁通量收集器来收集,检测元件(2、3)(通常是霍尔探头)被放置在其中。在现有技术中,磁化在某些情况下是双向可变的,而在其他情况下是径向和/或轴向可变的。
39、众所周知,每个永磁体都有磁化,该磁化的方向由磁化矢量定义。该磁化矢量定义了磁体内部的磁场方向。这个方向取决于磁体在其被制造时的极化方式。例如,放置在足够均匀的单向磁场中的“环形”形状的非极化磁体的磁化方向将沿着该磁场的方向来定向。如果磁场的方向被定向为垂直于磁体的旋转轴线(这被称为径向磁化),并且如果磁体围绕其轴线旋转运动,那么在磁体内部空间的固定点处看到的磁化方向将因此根据线性函数连续变化。本发明涉及到永磁体的磁化方向以多(准)周期方式变化的一系列传感器。这是当磁体运动预定距离时,磁化方向取相同值(根据场分量之一的信号的周期)的情况。
40、本发明的一般原理
41、如图2的非限制性示例所示,根据本发明的传感器通过复杂的磁化轮廓来区分,该磁化轮廓导致根据测量气隙和磁体的相对轨迹的磁化振幅(或其相对于轴线或参考点的定向)的多周期变化,涉及单个环形、盘形、管形或环形磁体,并在单个测量点测量。在这个实施例中,bx=brad(曲线10);by=btan(曲线11);bz(曲线12);对于该轮廓,沿不同测量轴线的信号的增量的数量n=2;p=216和t=4(n是在载波信号上定义的增量数量,p和t是在被携载信号上定义的增量数量)。
42、磁化水平由基本位于同一点的一个或多个磁敏元件在同一点处测量,例如由triaxis类型的霍尔探头(商品名)来测量,并且允许以高精度(对于在转一整圈上执行的检测<0.5°)来计算角度(或线性)位置,其不笨重,并且易于组装。
43、根据示例,磁化轮廓具有周期为p的(被携载)模式(包括p个测量增量)以及周期为p*n(实数n>0;恒定或可变)的(载波)模式(具有n个增量)。这种双模式使得能够组合粗略检测结果(粗略输出)和绝对位置的精确检测结果(精确输出)。例如,测量结果增量包括对磁极的测量结果。因此,极性相反的两个磁极将能够构成周期的给定周期。
44、图2示出了上述的两种模式,并且允许两种类型的位置计算:
45、-“粗略”输出,允许读取旋转中的位置;该输出信号包括在测量区间(例如,1次机械旋转)上分布的预定数量的n个测量增量;在这种具体情况下,分量[brad;btan]或[bz;btan]可用于计算角度值(经由计算这些分量的比值的弧正切)。
46、-由“粗略”信号携载的“精确”输出,使得能够局部细化角度位置的测量结果;该输出信号包括测量间隔上的预定数量的p个测量增量;在这种具体情况下,分量[bz;btan]将用于计算角度值。
47、-还有一个(或多个)导致不正常通量的磁异常(13),其用作“旋转计数”指标,使得能够对第一次偏移之后执行的旋转或事件的数量进行计数。该输出信号包括在测量区间上的预定数量的t个测量增量。
48、在图2所示的实施例中,对于所提出的磁化轮廓,注意到:n=2,p=216,t=4。
49、通过处理每个信号并组合这些信号,可以获得对传感器的一个或多个机械旋转进行检测的绝对角度位置的指示。
50、对于其他的磁化模式,和/或其他的场值收集点,场分量brad(20)、btan(21)和bz(22)的其他组合可能更有利于计算该绝对角度位置。
51、通过描述更简单的场轮廓的示例,例如n=2、p=8和t=0(图3),计算位置的原理将更容易理解。
52、分量bz(22)可以很容易地分解成具有n个增量的携载分量(23)(包络信号的平均值——见图4中的poly(bz)曲线(24))以及通过从包络信号的平均值中减去信号bz(22)获得的(图4中未示出)具有p个增量的被携载信号,其中曲线(20)对应于信号brad(20)的变化,曲线(21)对应于信号btan的变化,曲线(22)对应于信号bz的变化。
53、同样,btan分量(21)将提供相对于针对分量bz(22)计算的等效信号相移四分之一周期n*p的n个增量处的包络。它还将提供相移四分之一周期p的包括p个增量的精确信号(图5)。
54、包络bz(表示为env(bz))和包络btan(表示env(btan))的平均值可以被组合以计算“粗略”输出信号,例如通过计算角度theta(n)(其中n是指增量的数量):
55、theta(n)=atan(env(bz)/(env(btan)*增量))
56、同样,信号brad也可以直接与信号env(btan)相组合,以确定角度theta(n)(n是指增量的数量):
57、theta(n)=atan(brad/(env(btan)*增量))图6中表示为atan)。
58、将计算“增益”参数的值,以使强度比接近值1,并限制所计算的信号相对于理想信号的失真(图6中表示为bfl(最佳拟合线))。
59、考虑到信号的失真和索引偏差,这个信号的线性完全足以确定旋转中的角度位置,其中输出信号中存在明显的非线性。
60、为了细化这个角度位置的测量结果,可以用同样的方式将信号与分量bz和btan产生的p个增量结合起来,如图7所示。
61、在n=4的情况下,精确的线性信号被定义成总机械偏移量(例如,一个360°旋转)的1/4。
62、通过组合2个输出信号,我们可以确定:
63、ο“粗略”输出:测量时的增量p的角度扇区。
64、ο“精确”输出:在该增量p的扇区中的精确的角度值。
65、在图8所示的实施例中(在虚线所示的值处的测量结果),“粗略”输出表示测量结果为130°(因此根据bz,测量点位于第1个增量n和第3个增量p上),并且“精确”输出表示在电方面在增量p=3上=320°,即,在机械方面在增量p=3上320/p=40度,即总共45°(第1个增量p)+45°(第2个增量p)+40°(第3个增量p的读数)=130°,达到“精确”输出上获得的nl精度:通常在电方面在增量p上+/-3°,即此处在机械方面+/-3°/p=+/-0.375°。
66、ο因此,以绝对方式读取的值将是130°+/-0.375°。
67、通过增加旋转计数指数(t=1或t=2;未示出),可以通过简单地检测在bz(例如)中检测到的高于某个参考阈值的通量峰值的数量来使计数器增量。因此能够确定最终旋转的角度值和所产生的完整旋转的数量。
68、本领域的技术人员将立即理解,由于增量p的数量越大,所传感器的角度精度将更高。
69、对于在增量n上的处理所产生的相同的位置精度,我们希望将传感器的精度按以下比例提高:
70、οp'/p=4,以达到+/-0.09°的机械(图9)。
71、οp”/p=10.25,以达到+/-0.036°机械(图10)。
72、对于该传感器的实际实现,我们可以不受限制地考虑:
73、ο相对于运动磁体固定的探头;
74、ο相对于固定磁体运动的探头;
75、ο或两个前项的混合。
76、根据本发明的示例直线或曲线位移传感器的机械结构
77、图12和图13分别示出了曲线位移传感器或直线位移传感器的替代版本。磁体(1)具有平坦或弯曲的形状(缠绕在圆柱形毂的一部分上),其磁化的定向随着对应于至少两个不同的准周期贡献的组合的场分量而变化。磁场在至少两个方向上的检测元件(11)(或磁敏元件)使得可以计算线性位移的值。
78、本发明的检测原理很容易被转换到直线位移或曲线位移的测量中。为此,只需在精神上打开并且展开环形或磁化盘(1)(图12),就可以正确理解这个原理:磁化轮廓根据所获得的磁道的线性运动而连续变化(图13)。
79、检测和计算位置的模式保持不变。线性位移的值是通过将该位移索引到所执行的磁场的角度变化而获得的:例如,在20毫米路径上执行的磁场的360°旋转将构成我们的被携载载波信号。
80、叠加一个更精确的周期性模式(例如,在总共20毫米上重复5毫米路径上的场的360°旋转)将构成我们的被携载信号,从而将有可能获得如前所述的对该线性位移的更精确检测。考虑到这些在电方面360°的+/-3°的精度,我们获得在线性位移上的+/-0.041毫米的精度。
81、最后,增加一个或多个点磁异常(构成我们的第二被携载信号)将使得能够检测到线性位移上的一个或多个特定位置。
- 还没有人留言评论。精彩留言会获得点赞!