使用单独估计和联合估计对多个车辆进行协作状态跟踪的制作方法
本发明总体上涉及定位系统,诸如全球定位系统(gps)或准天顶卫星系统(qzss),并且更特别地,涉及使用信息的非同步协作来解析车辆的状态。
背景技术:
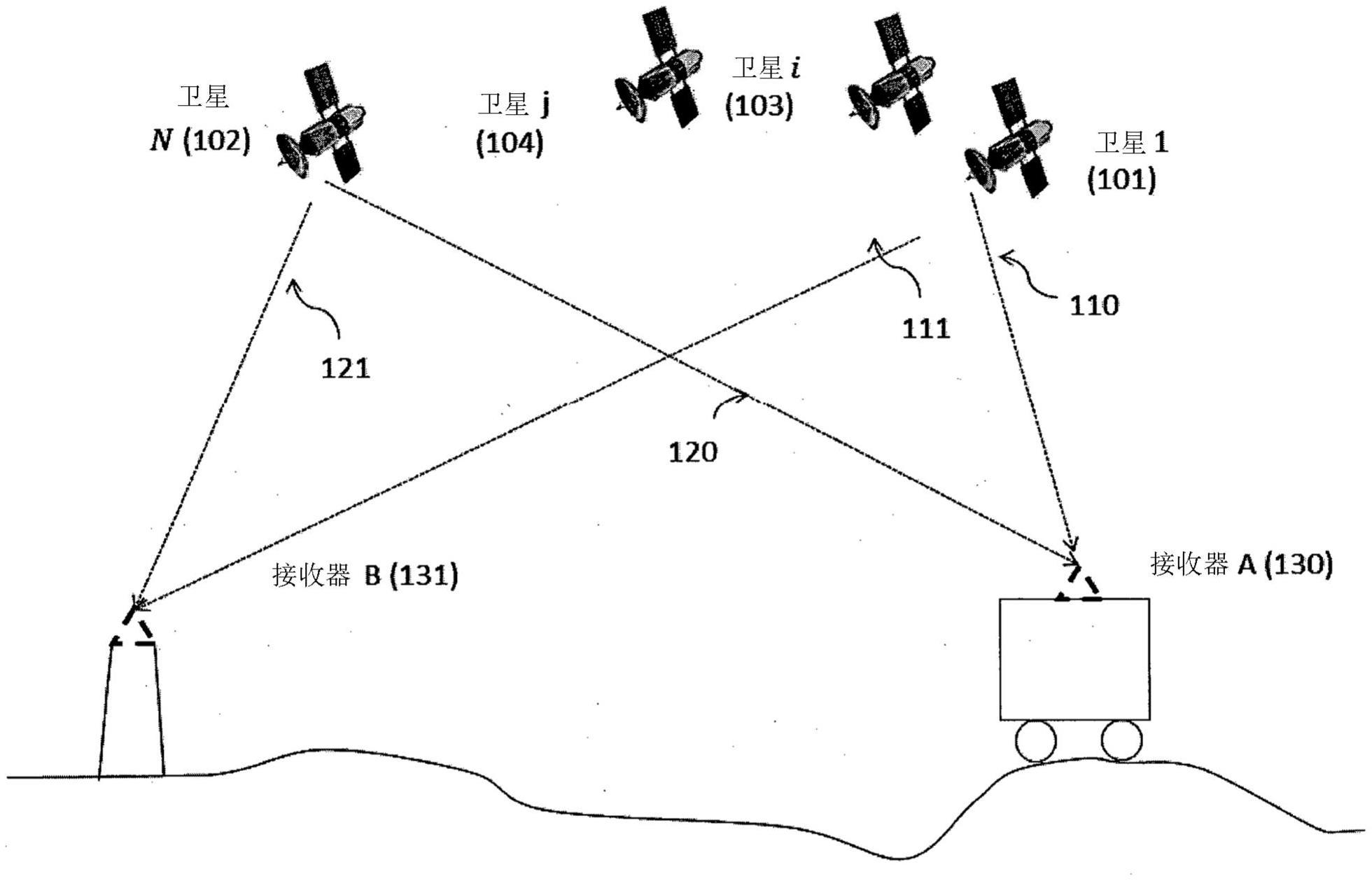
1、全球导航卫星系统(gnss)是一种可以被用于确定移动接收器相对于地球的地理位置的卫星系统。gnss的示例包括:gps、galileo、glonass、qzss以及beidou。已知各种全球导航卫星(gns)校正系统,该gns校正系统被配置用于从gnss卫星接收gnss信号数据、用于处理这些gnss数据、用于根据gnss数据计算gnss校正、以及用于向移动接收器提供这些校正,目的是实现对移动接收器的地理位置的更快且更准确的计算。
2、各种位置估计方法是已知的,其中,位置计算是基于通过基于地球的gnss接收器对所谓的伪距可观测量和载波相位可观测量的重复测量的。“伪距”或“码”可观测量表示gnss卫星信号的发送时间与该卫星信号的本地接收时间之间的差,并因此包括卫星的无线电信号所覆盖的几何距离。对所接收到的gnss卫星信号的载波与在接收器内部生成的这种信号的副本之间的对准的测量提供了另一个信息源,该信息源用于确定卫星与接收器之间的视距。对应的可观测量被称为“载波相位”,该载波相位表示因发送卫星和接收器的相对运动而造成的多普勒频率的积分值。
技术实现思路
1、技术问题
2、任何伪距观测都包含不可避免的误差贡献,其中包括接收器和发送器的时钟错误,以及因大气层的非零折射率、仪器延迟、多路径效应、以及检测器噪声而造成的附加延迟。任何载波相位观测另外包括在获得锁定该信号对准之前已经经过的未知的整数数量(integer number)的信号周期(即,整数数量的波长)。该数量被称为“载波相位模糊度(carrier phase ambiguity)”。通常,对所述可观测量进行测量,即,按离散连续时间由接收器进行采样。对可观测量进行测量的时间的索引被称为“历元(epoch)”。已知的位置确定方法通常涉及基于针对在连续历元采样的可观测量的测量,来对距离分量和误差分量进行动态数字值估计和校正的方案。
3、当gnss信号被连续跟踪并且没有失锁发生时,在跟踪阶段开始时解析的整数模糊度(integer ambiguity)可以被保持用于整个gnss定位跨度(span)。然而,gnss卫星信号可能偶尔被遮蔽(例如,由于“城市峡谷”环境中的建筑物),或者暂时被阻挡(例如,当接收器在桥梁下或穿过隧道时)。通常,在这样的情况下,整数模糊度值丢失并且必须重新确定。这个过程可以花费几秒钟至几分钟。事实上,在对伪距或者载波相位的一个或更多个测量中存在显著的多路径误差或未建模的系统性偏差(systematic bias)可能使得目前的商业定位系统难以解析该模糊度。随着接收器间隔(即,参考接收器与其位置正被确定的移动接收器之间的距离)的增加,距离相关偏差(例如,轨道误差以及电离层效应和对流层效应)随之增加,结果是,可靠的模糊度解析(或重新初始化)成为更大的挑战。而且,由于接收器在对信号的连续锁相中的不连续性,也可能发生失锁,这被称为周跳(cycle slip)。例如,周跳可以由功率损失、接收器软件的失效、或者不正常工作的卫星振荡器而造成。另外,周跳可以由改变的电离层条件而造成。
4、gnss增强指的是被用于提高由全球定位系统或其它全球导航卫星系统(通常是被用于导航的卫星网络)提供的定位信息的准确度的技术。例如,一些方法使用基于卫星之间的差分、接收器之间的差分、历元之间的差分、及其组合的差分技术。卫星与接收器之间的单差和双差减少了误差源,但没有消除它们。
5、因此,需要增加gnss定位的准确度。为了解决这个问题,许多不同的方法使用多个gnss接收器的协作来增加gnss定位的准确度。然而,为了正确地协作,所述多个gnss接收器需要进行同步化并且它们的操作需要被限制。例如,美国专利9,476,990描述了通过多个机械连接的模块的协作来进行gnss定位估计。然而,对gnss定位的准确度的协作增强的这种限制并不总是实用的。
6、问题的解决方案
7、一些实施方式基于这样的实现,即,基于从全球导航卫星系统(gnss)接收到的卫星信号来跟踪车辆的状态的现行方法采取基于车辆的内部模块的单独估计或集中式估计,或者以严格控制和/或同步的方式来执行状态估计的分布式估计。这种分布式估计的示例包括:确定状态跟踪的不同方面并且通过达成一致来估计车辆的状态的分散系统、独立地跟踪系统的状态同时一种类型的跟踪在另一种类型的跟踪上占主导地位的不平衡系统、以及包括优选地彼此相距固定距离定位的多个同步化gnss接收器的分布式系统。
8、一些实施方式意识到,在移动车辆的内部模块使用外部确定的一些附加信息时进行协作状态跟踪的优点。然而,一些实施方式基于这样的外部信息不总是可用的认识。因此,当跟踪由车辆的内部模块执行时,需要协作的但非同步的状态跟踪,但是当外部信息可用时,需要无缝地集成这种信息。
9、一些实施方式基于这样的实现,即,递归地跟踪车辆的状态的各种概率滤波器包括两个部分。第一部分估计车辆的状态的样本,第二部分基于这些估计的样本来对该状态的概率分布进行更新。在最初考虑上,将这两个部分彼此集成到一起,因为一个部分在没有另一部分的情况下是不执行的。然而,一些实施方式基于这样的实现,即,这两个部分通过因果相依性而不是时间相依性来相关。具体地,概率更新取决于状态样本估计的存在,这意味着当估计新的状态样本时,其的到达应当触发更新。然而,何时以及如何估计状态样本与概率分布的更新无关。
10、一些实施方式利用这种理解来消除概率状态估计和更新部分的歧义。这种消除歧义允许重复使用概率更新,而不管估计状态样本的时间和方式。因此,状态估计可以由车辆的内部模块基于gnss测量来确定,或者当车辆外部的模块可用时由这样的模块来确定。不管状态估计的原理如何,概率更新都以相同的方式操作,并且其质量不取决于新信息的到达频率,而是取决于其估计的质量。以这样的方式,内部状态估计器和外部状态估计器可以以不同步的方式进行操作。
11、基于这些理解,一些实施方式公开了一种多头(multi-head)测量模型,其允许概率滤波器使用不同的源来对关于车辆的状态的置信度(belief)进行更新。多头测量模型包括生成不同类型的输出但具有相同的概率结构的多个路径。例如,在一些实现中,多头测量模型包括两个头。第一头将对卫星信号的测量与对经受测量噪声的车辆的状态的置信度相关,并且第二头将对车辆的状态的估计与对经受估计噪声的车辆的状态的置信度相关联。因此,测量模型包括不同的信息和不同类型的噪声,但是具有允许单独地或者联合地使用不同头的输出的概率滤波器可接受的类似结构。
12、以这样的方式,在一些实施方式中,概率滤波器在各个更新步骤,根据经受过程噪声的车辆的状态转变的运动模型递归地传播车辆的状态的概率分布的参数,并且在接收到多头测量模型的第一头和多头测量模型的第二头中的一个头或组合的输出时,对概率分布的参数进行更新。
13、例如,第一头允许使用具有影响状态估计的准确度和/或质量的特定不确定性、偏差、以及和模糊度的gnss测量,来对车辆的状态的置信度进行更新。第一头的输出通常可用于概率滤波器的更新频率。与此对比,第一头允许使用外部信息来对车辆的状态的置信度进行更新,该外部信息可以仅偶尔被接收,但可以具有更高的状态估计准确度。例如,第二头可以处理从外部测量模块接收到的状态估计。因此,第二头可以不太频繁地接收信息,而不管多头测量模型的第一头和/或第二头的执行频率,第一头的输出和第二头的输出被无缝地集成在一起,而不破坏概率滤波器的概率保证。
14、一些实施方式基于外部测量模块可以是被动的、主动的或两者的理解。在被动模式下,外部测量模块接收由内部测量模块执行的根据gnss测量独立确定的对车辆的状态的估计。例如,车辆可以经过被配置成使用各种遥测技术来估计车辆的状态的路侧单元(rsu)附近。在主动模式下,车辆可以向也可以是rsu的远程服务器发送车辆的状态的当前信息,并且作为响应接收基于内部测量的校正而进行的外部测量。这里,当前信息包括车辆的状态估计的均值、车辆的状态的估计的协方差、由内部测量模块用来对其内部状态进行更新的一组码和载波相位测量。
15、为此,一些实施方式的目的是,提供适于由概率状态估计使用的对车辆的状态的协作的但非同步的估计。一些实施方式的另一目的是,当外部主动模块以可能不同于内部概率滤波器执行的更新速率执行时,提供这种协作的、非同步的估计。
16、一些实施方式基于这样的认识,即,gnss定位问题涉及根据从卫星的一个或几个星座接收到的一组码和载波相位测量来估计接收器的状态。所涉及的测量方程在接收器的位置上是时变的、非线性的,并且并入了各种偏差和整数模糊度。在载波相位测量中,存在被称为模糊度的整数偏差,其对于来自各个卫星的各个载波相位测量是唯一的。当在时间上考虑这些偏差时,它们遵循整数跳跃过程(integer jump process),在零星地且彼此独立地跳跃到新的整数值(通常被称为“周跳”)之前继续保持恒定。因此,gnss定位问题可以被看作是混合整数(mixed-integer)gnss定位问题,其解决了具有不断增加的大小的混合整数问题(在各个时间步长中包括新的整数偏差),并且需要仔细考虑如何最佳地放宽该估计问题以使最后所得到的算法可实现。
17、一些实施方式基于这样的实现,即,在概率滤波器的设定中,使得由例如周跳产生的整数模糊度的不确定性被反映到车辆的状态的概率分布的二次矩(second moment)(即,协方差)中。为此,为了受益于外部测量模块的主动模式,一些实施方式发送概率分布的参数,以允许远程服务器校正该信息。远程服务器可以从附近的其它车辆收集类似的信息、融合所接收到的信息以校正车辆的状态的概率分布的参数、以及将经更新的概率参数发送回车辆。在接收到经更新的概率参数时,外部测量模块在与经更新的参数一致的当前时刻估计车辆的状态,并且触发概率滤波器的执行。例如,外部测量模块可以基于车辆的运动模型在时间上传播概率分布的均值、对由所传播的均值和所接收到的方差定义的经更新的概率分布进行采样、以及使用具有所采样的状态估计的概率滤波器来对车辆的状态的概率分布进行更新。
18、在一些实施方式中,车辆的状态包括:车辆的位置、车辆的速度、来自特定卫星的与对车辆的载波相位测量相关联的整数模糊度、以及对大气层(例如,电离层和对流层)延迟进行建模的剩余偏差(residual bias)状态。例如,一些方法使用基于卫星之间的差分、接收器之间的差分、历元之间的差分、及其组合的差分技术。卫星与接收器之间的单差和双差减少了误差源,但没有消除它们,从而降低了状态估计的准确度。
19、一些实施方式基于这样的实现,即,忽略诸如电离层误差的状态偏差(statebias)会导致状态估计的轻微不准确。这是因为偏差通常是通过gnss测量的单差或双差来去除的。当针对车辆的位置估计的所希望的准确度在米量级时,该解决方案工作良好,但是当所希望的准确度在厘米量级时,该解决方案可能是个问题。为此,一些实施方式在车辆的状态中包括状态偏差,并将其确定为由概率滤波器提供的状态跟踪的部分。
20、一些实施方式基于这样的认识,即,当在远程服务器处确定的外部状态估计足够准确时,启用与外部服务器的非同步但协作的通信的多头测量模型可以解决状态估计的准确度的问题。然而,仍然需要该服务器以所希望的准确度来确定所述状态。
21、一些实施方式认识到,对于单独车辆,准确地确定大气层时间延迟可能是不切实际的,因为对于单独车辆,概率滤波器需要解析整数模糊度和大气层延迟两者中的不确定性。然而,对于彼此足够接近(例如,2km至10km)的车辆,大气层延迟是类似的。因此,对于从多个车辆收集类似信息的外部主动模块,在不同车辆的状态之间存在显著的重叠,使得外部测量模块可以以单独车辆的概率滤波器所不能的方式来对单独车辆的状态进行更新。例如,电离层状态偏差可以在处于彼此附近的车辆之间共用。
22、另外或者另选地,一些实施方式基于这样的实现,即,由概率滤波器确定的状态估计的不准确度可以由模糊度和剩余延迟(residual delay)造成,但也可以由测量噪声造成。一些实施方式基于这样的实现,即,当协作地确定多个车辆的状态时,车辆的状态可以重叠也可以不重叠,模糊度或延迟可以重叠也可以不重叠,但是不同车辆的测量噪声具有可以由协作状态估计探索的相关性。例如,不同车辆对的测量中的误差可以彼此相关。
23、为此,一些实施方式基于将来自不同车辆的信息组合到扩充域(augmenteddomain)中的扩充概率滤波器,来执行多个车辆的概率跟踪。例如,扩充概率滤波器将多个车辆的状态融合成扩充状态,将多个车辆的卫星信号测量融合成扩充状态的扩充测量,该扩充测量经受由非对角协方差矩阵定义的扩充测量噪声。该非对角协方差矩阵具有捕获不同车辆的测量噪声之间的相关性的非零非对角元素。该相关性是扩充概率滤波器可以探索用于联合跟踪多个车辆的状态的附加信息。
24、在一些实施方式中,概率滤波器是混合整数最小二乘卡尔曼滤波器,其中,非线性测量方程围绕其当前估计进行线性化,从而导致混合整数扩展卡尔曼滤波器。其它实施方式认识到ekf中的线性化可能是不准确的。因此,在一些实施方式中,概率滤波器是混合整数线性回归卡尔曼滤波器。这种滤波器更准确地表示概率分布的一次矩和二次矩,但是在计算上明显更昂贵。
25、在一个实施方式中,认识到,车辆的状态的部分(例如,整数模糊度)在模型中是线性的,但位置是非线性的。因此,可以以分析方式确定一次矩的部分和二次矩的部分,而利用线性回归卡尔曼滤波器来估计其它部分。
26、gnss定位问题可以被看作是混合整数gnss定位问题,其解决了具有不断增加的大小的混合整数问题(在各个时间步长中包括新的整数偏差),并且需要仔细考虑如何最佳地放宽该估计问题以使最后所得到的算法可实现。尤其是对于当组合来自多个车辆的信息时的状态的外部估计,最后所得到的估计问题将是非常高维的,并因此在计算上是昂贵的。
27、在一些实施方式中,通过确定两个相关但分离的概率分布来解决所述放宽,其中,一个分布仅考虑实值参数,即,忽略模糊度实际上是整数,并且基于通过求解优化问题而从第一分布确定的整数模糊度来确定第二分布。
28、因此,一个实施方式公开了一种联合跟踪多个车辆的状态的服务器,其中,各个车辆的状态包括捕获大气层延迟中的剩余误差(residual error)的一个或多个状态偏差,该服务器包括:至少一个处理器;以及存储器,该存储器上存储有指令,该指令在由所述至少一个处理器执行时,使该服务器:从多个车辆接收多个传输,来自车辆的各个传输皆包括在该车辆处接收到的卫星信号测量以及该车辆的状态的概率分布的参数;将通过对应概率分布的参数定义的多个车辆的状态融合成多个车辆的扩充状态;将多个车辆的卫星信号测量融合成扩充状态的扩充测量,该扩充测量经受由具有非零非对角元素的非对角协方差矩阵定义的扩充测量噪声,各个非零非对角元素皆与一对对应车辆的测量中的误差相关;基于经受扩充测量噪声的扩充测量执行概率滤波器以对扩充状态进行更新;以及将多个车辆中的至少一些车辆的状态的概率分布的参数与经更新的扩充状态的对应部分进行融合,以输出多个车辆中的至少一些车辆的状态的概率分布的经融合的参数。
- 还没有人留言评论。精彩留言会获得点赞!