用于表征LIDAR点云质量的方法与流程
背景技术:
1、光探测与测距(lidar,激光雷达)系统可用于通过向lidar系统外部的环境中发射光脉冲来确定关于该环境中的对象的信息。当在lidar系统处检测到返回光脉冲时,lidar系统能够确定在环境中在发射光脉冲的方向上存在对象。此外,lidar系统能够基于发射光脉冲与检测到返回光脉冲之间的时间量(例如,光脉冲的“飞行时间”(tof))来确定对象距lidar系统的距离。该检测到的返回光脉冲可以被保存为一个点。lidar系统可以不断地发射并检测光脉冲,并且可以对应地创建多个这样的点。这样的点的集合可以被称为“点云”,可以分析这种点云以确定关于环境中的对象的信息。例如,点云中的点簇可以与特定对象相关联并且可以提供环境中的一个或多个对象的尺寸和/或形状的指示。在某些情况下,点云的创建和分析可以由其中包含lidar的系统来执行。例如,如果lidar系统可以并入自动驾驶车辆中,则点云可以用于辅助车辆检测环境中的对象,使得车辆可以在环境中导航。然而,在某些情况下,可能存在与点云中的一个或多个点相关联的一定量的误差。
技术实现思路
技术特征:
1.一种方法,包括:
2.根据权利要求1所述的方法,其中,所述第一分数是零值,所述第二分数是非零值。
3.根据权利要求1所述的方法,还包括:
4.根据权利要求1所述的方法,其中,所述第二点是点云中从所述第二点云的可接受的误差阈值横向地或径向地偏移的无效点。
5.根据权利要求1所述的方法,其中,所述第二点云的可接受的误差阈值表示距所述点云的中心点的阈值距离。
6.根据权利要求1所述的方法,其中,捕获所述第一点云是使用参考lidar系统、经纬仪或激光测距仪来执行的,所述参考lidar系统不同于所述lidar系统。
7.根据权利要求1所述的方法,其中,所述测试目标还包括在第二背衬后面的第一背衬,所述第一背衬是白色背衬,所述第二背衬是黑色背衬,所述第二背衬在所述回射对象后面,并且其中,捕获所述第二点云包括将所述lidar系统的方向从所述第一背衬转变到所述第二背衬,然后转变到所述回射对象。
8.根据权利要求1所述的方法,其中,所述回射对象从所述第二背衬位移给定距离。
9.根据权利要求1所述的方法,其中,所述回射对象位于所述第二背衬上。
10.根据权利要求1所述的方法,还包括:
11.一种系统,包括:
12.根据权利要求11所述的系统,其中,所述第一分数是零值,所述第二分数是非零值。
13.根据权利要求11所述的系统,其中,所述计算机可执行指令还使所述处理器:
14.根据权利要求11所述的系统,其中,所述第二点是点云中从所述第二点云的可接受的误差阈值横向地或径向地偏移的无效点。
15.根据权利要求11所述的系统,其中,所述第二点云的可接受的误差阈值表示距所述点云的中心点的阈值距离。
16.根据权利要求11所述的系统,其中,捕获所述第一点云是使用参考lidar系统、经纬仪或激光测距仪来执行的,所述参考lidar系统不同于所述lidar系统。
17.根据权利要求11所述的系统,其中,所述测试目标还包括在第二背衬后面的第一背衬,所述第一背衬是白色背衬,所述第二背衬是黑色背衬,所述第二背衬在所述回射对象后面,并且其中,捕获所述第二点云包括将所述lidar系统的方向从所述第一背衬转变到所述第二背衬,然后转变到所述回射对象。
18.根据权利要求11所述的系统,其中,所述回射对象从所述第二背衬位移给定距离。
19.根据权利要求11所述的系统,其中,所述回射对象位于所述第二背衬上。
20.根据权利要求11所述的系统,其中,所述计算机可执行指令还使所述处理器:
技术总结
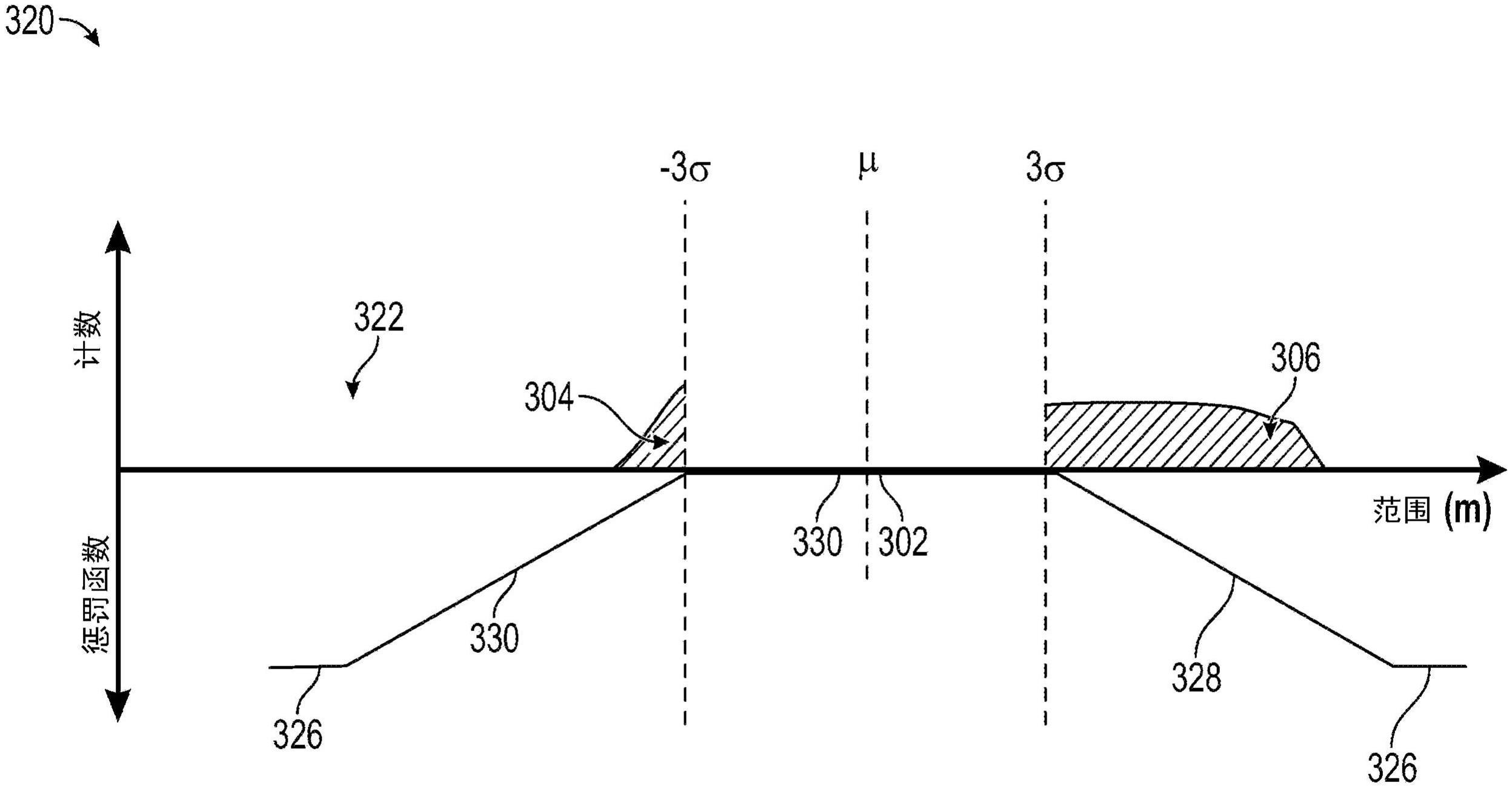
公开了用于表征LIDAR点云质量的系统、方法和计算机可读介质。示例方法可以涉及捕获对于包括回射对象的测试目标的第一点云,该第一云包括第一区域。示例方法还可以涉及由LIDAR系统捕获对于测试目标的第二点云。示例方法还可以涉及将惩罚函数应用于第二点云中的第一点,其中,该第一点在基于第一区域的可接受的误差阈值内。示例方法还可以涉及将惩罚函数应用于第二点云中的第二点,其中,该第二点在基于第一区域的该可接受的误差阈值外。示例方法还可以涉及基于惩罚函数生成第一点的第一分数和第二点的第二分数。示例方法还可以涉及组合第一分数和第二分数以产生第二点云的点云质量度量。示例方法还可以涉及基于点云质量度量对于回射对象校准LIDAR系统。
技术研发人员:M·V·莫雷利,L·M·斯豪滕-埃弗斯
受保护的技术使用者:LG伊诺特有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!