用于测量曲面物体的自校准柔性超声阵列的制作方法
背景技术:
1、本公开涉及用于测量曲面物体的声学系统和方法。
2、声学系统在测量物体和材料(例如,组织)方面有多种应用。例如,可以使用由声换能器执行的脉冲回波测量来生成乳腺x线摄影图像和其他声学图像。可以从穿过材料子结构和/或被材料子结构反射的声波的测量的特性(例如,振幅、频率、相位和/或发射脉冲和接收回波之间的时间)中提取关于物体或组织内部的材料和结构的信息。当在不同换能器之间执行脉冲回波测量和/或层析测量时,超声成像的重建取决于换能器的(相对)位置的先验知识。然而,在舒适、灵活和/或可拉伸的超声阵列中,不同换能器的元件间位置可能是未知的,这阻碍了图像的重建。
3、作为背景,us2020/0278327a1描述了用于几何和像差校正的相控阵校准。用于校准具有多个换能器元件的超声换能器的几何形状的各种方法包括:提供跨越区域的声反射器,所述区域穿过从所有(或至少一些)换能器元件传输到焦点区的超声波的多个波束路径;使换能器元件将超声波发射到焦点区;测量超声波在声反射器上的反射;并且至少部分地基于测量的反射,确定与换能器元件相关联的最佳几何参数。遗憾的是,所述校准不能在成像期间(原位置处)执行。
4、需要改进的声学系统和方法,例如允许容易地测量具有可变形状的曲面物体。
技术实现思路
1、本公开的方面涉及用于测量曲面物体的声学系统和方法。柔性片被配置为至少部分地包围曲面物体。所述柔性片包括分布在柔性片表面的声换能器的阵列,以用于从不同侧声学地接触所述曲面物体。所述声换能器被配置为在相对于彼此的可变位置处生成和/或测量声波。所述可变位置在三维空间中的空间坐标通常取决于包围所述曲面物体的片表面的变形。有利地,当柔性片包围曲面物体时,可以确定声换能器的空间坐标。特别地,可以基于声波的一组传播时间来确定所述空间坐标,所述声波例如穿过所述曲面物体并且在位于曲面物体不同侧的换能器的各种组合之间发送。因此,以这种方式确定的换能器的位置可以用于处理换能器的声信号,以生成图像和/或测量物体内部的其他材料的特性和子结构。
技术特征:
1.一种用于测量曲面物体(obj)的声学系统(100),所述系统包括:
2.根据权利要求1所述的声学系统,其中,所述一组传播时间(tab,tbc,tac)包括或由以下组成:所述声波(w)的传输时间,所述声波(w)穿过所述曲面物体(obj)并且在声换能器(10)的阵列中的不同换能器(10a,10b,10c)之间发送,所述声换能器(10)的阵列分布在所述片表面(20s)上并且围绕在曲面物体(obj)的边界的不同侧声学地接触所述曲面物体(obj)。
3.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为使用所述声换能器(10)的阵列生成所述曲面物体(obj)的图像,其中,所述图像是基于所述声换能器(10)生成的和/或测量的声波以及基于所述一组传播时间(tab,tbc,tac)确定的所述声换能器(10)的空间坐标(x,y,z)生成的。
4.根据前述权利要求中任一项所述的声学系统,其中,每个换能器具有一组预定表面坐标(sx,sy)和/或在所述换能器之间沿所述片表面(20s)具有预定表面距离(dp,dab),其中,所述控制器(30)被配置为:进一步基于所述预定表面坐标(sx,sy)和/或所述预定表面距离(dp,dab)来确定所述声换能器(10)的空间坐标(x,y,z)。
5.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为确定所述片表面(20s)的建模形状(20m),其中,所述建模形状(20m)是基于一对换能器(10a、10b;10b、10c;10a、10c)之间的传播时间(tab,tbc,tac)计算的,其中,每个换能器具有约束到所述片表面(20s)的建模位置,其中,所述换能器的建模位置进一步由所述柔性片(20)上的所述声换能器(10)的一组预定表面坐标(sx,sy)和/或所述声换能器(10)之间沿所述片表面(20s)的表面距离(dab)来约束。
6.根据前述权利要求中任一项所述的声学系统,其中,所述柔性片(20)是可拉伸的,以允许声换能器(10)之间沿所述片表面(20s)具有可变表面距离(dab),其中,所述声换能器(10)进一步被配置为:生成和/或测量在所述片表面(20s)内部传播和/或沿所述片表面(20s)传播的导波,以确定所述可变表面距离(dab)。
7.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:根据由一组可变缩放参数(a,b,c)和/或坐标定义的分析函数,基于预定参数化形状来计算所述建模形状。
8.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:通过根据所述一组传播时间(tab,tbc,tac)调整所述声换能器(10)的一组预定空间坐标,来确定所述声换能器(10)的一组当前空间坐标(x,y,z)。
9.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:基于一个或多个声信号来确定所述柔性片(20)的凸形分段区域,所述凸形分段区域阻挡沿一对声换能器(10a,10i)之间的路径传播的所述一个或多个声信号穿过。
10.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:通过对换能器(10)的阵列的至少一个子集(10a、10b;10a、10c;10b、10c)中的每一对换能器(10a、10b)进行比较,来确定所述声换能器(10)的空间坐标(x,y,z):
11.根据前述权利要求中任一项所述的声学系统,其中,所述片表面(20s)的曲率度(rab)是基于一对或多对换能器之间的一组传播时间(tab,tbc,tac)确定的,其中,所述片表面(20s)的形状是基于所述柔性片(20)在相应一对换能器之间的一个或多个曲率度(rab)确定的,其中,所述控制器(30)被配置为:针对所述换能器(10)的阵列的至少一个子集(10a、10b;10a、10c;10b、10c)中的相应一对换能器(10a、10b;10b、10c),通过比较相应的欧几里德距离(eab,ebc)和相应的表面距离(dab,dbc)来计算一组曲率(rab,rbc),从而确定所述声换能器(10)的空间坐标(x,y,z)。
12.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:使用片表面(20s)的模型来确定所述声换能器(10)的空间坐标(x,y,z),所述片表面(20s)的模型包括建模的换能器在建模的片表面上的相应位置,其中,所述模型用于计算所述建模的换能器之间的一组建模传播时间,其中,所述建模传播时间取决于所述建模的换能器之间的相应距离,其中,所述建模的换能器之间的相应距离取决于所述建模的换能器在建模的片表面上的相应位置和所述建模的片表面的可变形状,其中,所述建模的片表面的可变形状被调整以使得所述建模传播时间与测量的一组传播时间(tab,tbc,tac)相拟合,其中,所述声换能器(10)的所述空间坐标(x,y,z)是基于所述建模的换能器在建模的片上的相应位置确定的。
13.根据前述权利要求中任一项所述的声学系统,其中,所述控制器(30)被配置为:测量声波(w)的传播时间(tac),所述声波(w)穿过所述曲面物体(obj)并且在第一声换能器(10a)和第三换能器(10c)之间发送,其中,第二换能器(10b)沿所述柔性片的片表面上的表面路径布置在所述第一声换能器(10a)和所述第三换能器(10c)之间,其中,所述控制器(30)被配置为至少部分地基于对所述第二换能器(10b)相对于所述第一声换能器(10a)和第三换能器(10c)在所述柔性片(20)的建模表面(20m)上的预定表面坐标和/或表面距离(dab,dbc)进行内插来确定所述第二换能器(10b)的空间坐标(xb,yb,zb)。
14.一种用于声学测量曲面物体(obj)的方法,所述方法包括:
15.一种存储有指令的非暂时性计算机可读介质,所述指令在由权利要求1至13中任一项所述的声学系统(100)执行时,使得所述声学系统:
技术总结
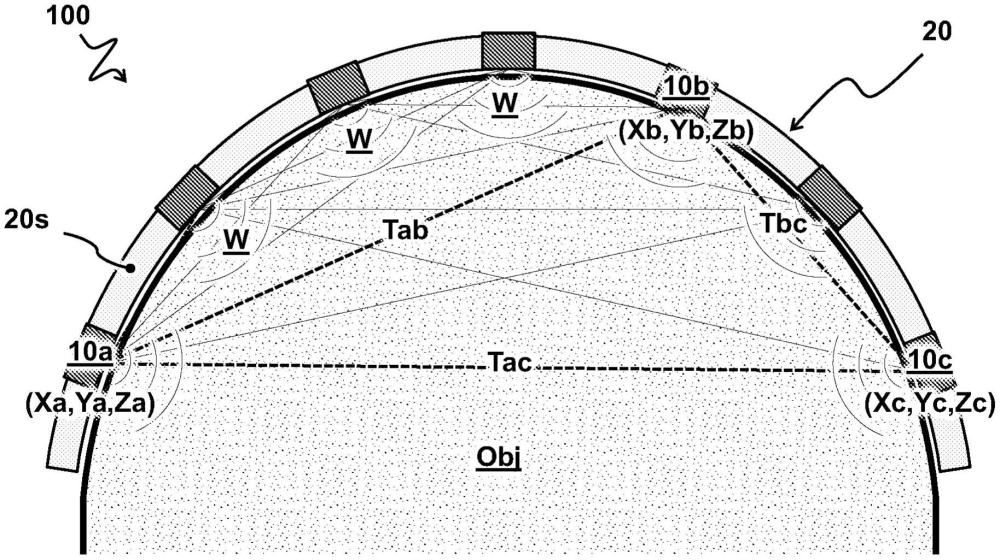
用于测量曲面物体(Obj)的声学系统(100)和方法。提供一种具有声换能器(10)的阵列的柔性片(20),所述声换能器的阵列分布在所述片(20)的表面(20s)上。所述片(20)至少部分地包围物体(Obj),使得不同的换能器(10a,10b,10c)从不同侧声学地接触所述物体(Obj)。所述换能器(10)用于在物体(Obj)周围的可变位置处生成和/或测量声波(W)。所述可变位置在三维空间中的空间坐标(X,Y,Z)取决于包围所述物体(Obj)的片表面(20s)的变形。当所述柔性片(20)包围曲面物体(Obj)时,基于例如在不同换能器(10a,10b)之间发送的穿过所述物体(Obj)的声波(W)的一组传播时间(Tab,Tbc,Tac)来确定所述换能器(10)的空间坐标(X,Y,Z)。
技术研发人员:扬-劳伦斯·皮特尔·雅各布斯·范徳斯特恩,劳伦斯·克里斯蒂安·约翰内斯·玛丽亚·佩特斯,保罗·路易斯·玛莉亚·约瑟夫·万妮尔,阿尔诺·威廉·弗雷德里克·佛尔克
受保护的技术使用者:荷兰应用自然科学研究组织TNO
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!