动态物体三维结构光成像的相位解码方法及装置与流程
本发明涉及动态物体空间测量,尤其涉及一种动态物体三维结构光成像的相位解码方法及装置。
背景技术:
1、传统对静态物体的三维测量方式灵活性差,会大大降低生产效率,已经远远不能满足当前对动态物体测量的需求。结构光三维成像技术是利用辅助的结构光照明获取物体三维像,即通过投影一个载频条纹到被成像的物体表面,利用成像设备从另一个角度记录受被成像物体高度调制的变形条纹图像,再从获取的变形条纹图中通过相位解码,从而重建出被测物体的三维数字像,而相位解码的精度和效率则直接决定了三维数字像重建的效果。
2、对物体的结构光三维成像,现有技术中通常都是依赖于多个频率多步相移的求解方法,但是该类方法为确保测量精度需要投影的条纹数量较多,如通常要求在双向(横向x和纵向y)各测量一次投影不同频率(频率数大于等于2)的不同相移步数(相移步数大于等于3)的条纹图像,至少需要2×3×2=12幅条纹图像,然后由成像设备依次记录被成像物体高度调制的变形条纹图像,因而需要对大量的条纹图像进行计算处理,导致测量的效率低。虽然上述方法可以较好的适用于静态物体,但是若应用于动态物体的测量时会需要进行大量的图像处理计算,因而并不适用于动态物体的测量,尤其是难以既精准又高效的实现大量动态物体测量。
3、有从业者提出基于结构光三维成像技术实现对动态物体的测量时,通过改变编码方式(rgb条纹编码技术)、减少条纹图像等方法以提升测量效率,该类方法虽然可以在一定程度上提高测量效率,但是实际上牺牲了成像精度,使得最终的成像精度不高;其他例如通过升级硬件(如采用高帧率高速相机进行拍摄等方式来减少记录时间)的方式提升测量效率,又会导致大大增加实现成本,无法适用于大规模条纹图像的采集。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、成本低、解码效率以及精度高的动态物体三维结构光成像的相位解码方法及装置。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种动态物体三维结构光成像的相位解码方法,步骤包括:
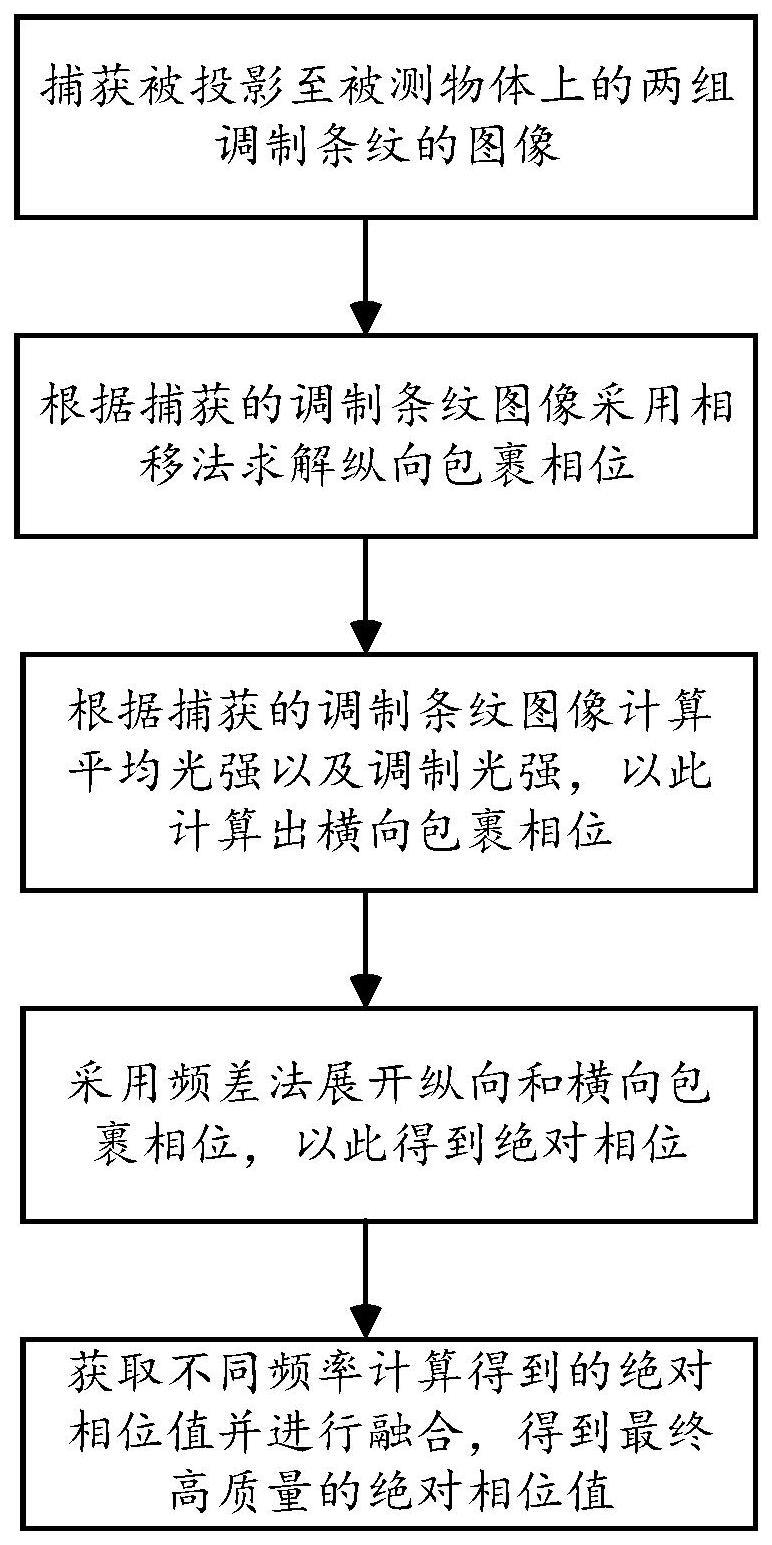
4、捕获被投影至被测物体上的两组调制条纹的图像,两组调制条纹为预先按照不同频率生成后投影至被测物体上,每组调制条纹包括多条纵向条纹和一条横向条纹,或者包括多条横向条纹和一条纵向条纹;
5、根据捕获的调制条纹图像采用n′步相移法求解纵向包裹相位,其中n′≥3;
6、根据捕获的调制条纹图像计算平均光强以及调制光强,根据所述平均光强以及调制光强计算出横向包裹相位;
7、采用频差法将所述纵向包裹相位、横向包裹相位进行展开得到纵向绝对相位和横向绝对相位。
8、进一步的,所述纵向条纹的表达式为:
9、
10、所述横向条纹的表达式为:
11、ih(xp,yp)=ap(xp,yp)+bp(xp,yp)cos(2πfjyp)
12、其中,为纵向条纹,ihp为横向条纹,fi为第i个频率,ap(xp,yp)为直流分量信号的振幅值,bp(xp,yp)为交流分量信号的振幅值,(xp,yp)为投影仪的像素点坐标,n为相移索引号,n为总的相移步数。
13、进一步的,所述捕获被投影至被测物体上的两组调制条纹的图像中,每组所述调制条纹为n′条纵向条纹和一条横向条纹,或者为n′条横向条纹和一条纵向条纹。
14、进一步的,当使用三步相移法求解所述纵向包裹相位时,所述纵向包裹相位的计算表达式为:
15、
16、其中,i0、i1以及i2分别为第1、2、3步条纹图的光强。
17、当使用三步以上的求解所述纵向包裹相位时,所述纵向包裹相位的计算表达式为:
18、
19、其中,n为相移索引号,n为相移步数,in为第n-1步条纹图的光强。
20、进一步的,当使用三步相移法求解得到所述纵向包裹相位时,计算平均光强以及调制光强的表达式分别为:
21、
22、
23、当使用三步以上的求解所述纵向包裹相位时,计算平均光强以及调制光强的表达式分别为:
24、
25、
26、其中,a为平均光强,b为调制光强,n为相移索引号,n为相移步数。
27、进一步的,根据所述纵向包裹相位、横向包裹相位采用双频外差法,计算所述纵向绝对相位和横向绝对相位时,计算表达式为:
28、
29、或
30、
31、φ1=2πm+φ1
32、其中,round()为就近取整,m为当前点所属的条纹周期数;
33、φ12为生成调制条纹所述使用的两种频率的相位差,即计算表达式为:
34、
35、其中,φ1、φ2分别为两种频率对应的绝对相位,φ1、φ2分别为两种频率。
36、进一步的,所述根据所述纵向包裹相位、横向包裹相位频差法计算出纵向绝对相位和横向绝对相位后,还包括获取不同频率计算得到的绝对相位值并进行融合,得到最终的绝对相位值。
37、进一步的,所述获取不同频率计算得到的绝对相位采用加权融合方式,得到最终的绝对相位值,计算表达式为:
38、φ=w1φ1+w2φ2+...+wnφn
39、其中,φ为最终的绝对相位值,φ1~φn分别为各个频率计算得到的绝对相位值,w1~wn分别为加权系数,n为频率个数。
40、一种动态物体三维结构光成像的相位解码装置,包括:
41、捕获模块,用于捕获被投影至被测物体上的两组调制条纹的图像,两组调制条纹为预先按照不同频率生成后投影至被测物体上,每组调制条纹包括多条纵向条纹和一条横向条纹,或者包括多条横向条纹和一条纵向条纹;
42、纵向包裹相位求解模块,用于根据捕获的调制条纹图像采用n′步相移法求解纵向包裹相位,其中n′≥3;
43、横向包裹相位求解模块,用于根据捕获的调制条纹图像计算平均光强以及调制光强,根据所述平均光强以及调制光强计算出横向包裹相位;
44、绝对相位计算模块,用于根据所述纵向包裹相位、横向包裹相位采用频差法计算出纵向绝对相位和横向绝对相位,完成相位解码。
45、一种计算机设备置,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
46、与现有技术相比,本发明的优点在于:
47、1、本发明针对动态物体的三维结构光成像的相位解码,通过采用不同的求解方法求解纵向包裹相位与横向包裹相位,纵向包裹相位采用n′步相移法进行求解,横向包裹相位则通过先计算平均光强以及调制光强然后依据该平均光强以及调制光强计算得出,然后再结合据纵向包裹相位、横向包裹相位采用一次频差法来最终计算出纵向绝对相位和横向绝对相位,形成n′+1步的解相位方式,通过横向条纹的变量数值计算减少纵向投影条纹数目,或者通过纵向条纹的变量数值计算减少横向投影条纹数目,可以有效减少投影所需的条纹数量,从而能够在确保相位解码精度的前提下,明显提高相位解码的效率,实现面向动态物体的三维结构光成像的高效相位解码。
48、2、本发明进一步通过针对不同频率获得的绝对相位进行多频融合,可以充分发挥高频相位精度更高、低频相位更稳定的特性,有效评估相位质量的好坏,解决传统单一频率的相位测量方法中高频稳定性差、低频精度差的问题,从而进一步提高相位解码精度以及生成的绝对相位图像的质量。
- 还没有人留言评论。精彩留言会获得点赞!