一种字典矩阵迭代优化的SOMP离网格直接定位方法
本发明属于无源定位,涉及一种同步正交匹配跟踪(simultaneousorthogonal matching persuit,somp)和泰勒迭代补偿联合的直接定位方法,尤其涉及一种利用泰勒迭代补偿优化字典矩阵的somp离网格直接定位方法。
背景技术:
1、无源定位技术是现代雷达信号处理领域的一个重要研究方向。无源定位技术无需大功率有源设备进行目标探测,仅利用接收器截获非合作信号即可进行信源位置的估计,因而具有隐蔽性能好、能量消耗低的特点,在越来越多的场景中得到广泛应用。
2、直接定位技术是无源定位技术的一种,通过多个基站对信源信号进行接收,直接对原始采样信号进行处理而获得信源的位置估计。相比于传统两步法定位技术,直接定位技术能够更好地减少信息的丢失,具有很好的鲁棒性,拥有很大的发展前景。但是直接定位技术需要对多个基站的数据进行同步处理,并且需要对网格进行遍历搜索,存在算法的运算量大、网格失配的问题。近年来,随着压缩感知理论的引入,为直接定位技术提供了新的思路,稀疏类方法有效降低了直接定位算法的运算量,但是网格失配的问题仍然存在。在阵列信号处理中,离网格方法是解决网格失配问题的一种思路,但是直接将离网格方法应用于直接定位中,存在多站补偿冲突的问题,因此研究能够在直接定位技术中应用的离网格稀疏表示方法具有重要意义。
技术实现思路
1、本发明针对现有技术中的不足,提供一种字典矩阵迭代优化的somp离网格直接定位方法。该方法基于同步正交匹配方法,利用泰勒迭代补偿对字典矩阵进行优化,实现对信源位置的精准估计。
2、为实现上述目的,本发明采用以下技术方案:
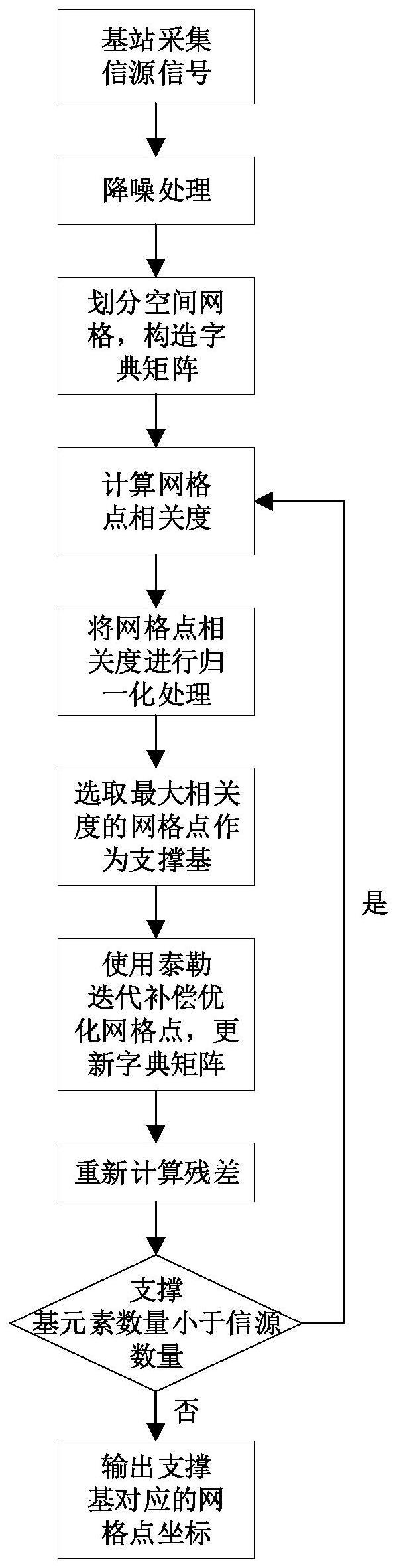
3、一种字典矩阵迭代优化的somp离网格直接定位方法,其特征在于,包括以下步骤:
4、步骤1:由均匀线阵组成的分布式基站采集多快拍信号;
5、步骤2:对多次接收到的信号计算其协方差矩阵,做特征值分解,取信号子空间作为初始接收信号;
6、步骤3:对分布式基站围成的区域进行空间网格的划分,根据网格构造字典矩阵;
7、步骤4:利用接收信号对空间网格进行相关度检测;
8、步骤5:对相关度检测的检测结果进行归一化处理;
9、步骤6:取最大相关度的网格点归入支撑基;
10、步骤7:使用泰勒迭代对网格点位置进行优化,更新字典矩阵;
11、步骤8:利用支撑基和字典矩阵估计相应的信源信号,从初始接收信号中减去已经估计出的信源信号,得到更新后的残差;
12、步骤9:将残差作为接收信号,如果支撑基元素数量小于信源数目,转至步骤4,否则转至步骤10;
13、步骤10:利用支撑基从更新后的网格点中选取信源位置。
14、为优化上述技术方案,采取的具体措施还包括:
15、进一步地,所述步骤1中,基站分布在k个信源所在区域的四周,均匀线阵的有效测向空间覆盖多个基站围成的区域,基站h的采集信号表示为:
16、xh(t)=ahsh(t)+nh(t),1≤h≤n
17、式中,xh(t)为第h个基站采集的数据,ah为第h个基站的阵列流型,sh(t)为信源发送至第h个基站的传输信号构成的信源矢量,nh(t)为第h个基站接收到的噪声数据构成的噪声矢量,n表示基站数量。
18、进一步地,所述步骤2中,采用下式对多次接收到的信号计算其协方差矩阵,做特征值分解,取信号子空间:
19、
20、
21、式中,xh(tl)表示tl快拍时刻基站采集的信号,rh代表第h个基站采集信号的协方差矩阵,由第h个基站采集数据xh(t)获得,e(·)表示期望,l表示采集信号的快拍数;对协方差矩阵进行特征值分解,表示一个k×k维的对角阵,其对角元素由特征值分解所得的最大的k个特征值构成,是由m-k个最小的特征值构成的对角阵,m表示均匀线阵的阵元数,k个最大的特征值对应的特征向量构成的矩阵为信号子空间m-k个最小的特征值对应的特征向量构成的矩阵为噪声子空间初始接收信号
22、进一步地,所述步骤3具体如下:
23、将分布式基站围成的区域划分成xm行ym列的xm×ym个网格点,第i个网格点的位置坐标表示为pi=(xi,yi),其中1≤i≤xm×ym;
24、构造每个基站的字典矩阵φh,其表达式如下:
25、
26、
27、式中,每个网格点至基站的相对角度值的三角函数值为第h个基站所在位置的坐标,θh表示第h个基站的均匀线阵法线方向与正北方向的夹角,θh的取值范围为-90°~90°,规定法线在正北顺时针方向时θh为正值,阵元间距d=λ/2,λ表示波长,m表示均匀线阵的阵元数。
28、进一步地,所述步骤4具体如下:
29、通过下式计算第h个基站的信号测量域中第i个网格点的相关度
30、
31、式中,rh(tl)表示tl快拍时刻的残差,在第一次执行步骤4的时候,残差rh等于初始接收信号k表示快拍数,快拍数等于信源数量。
32、进一步地,所述步骤5中,通过下式对第h个基站的信号测量域中第i个网格点的相关度进行归一化:
33、
34、式中,gh是第h个基站的信号测量域中网格点的相关度集合,max(·)表示取集合中最大值,min(·)表示取集合中最小值。
35、进一步地,所述步骤6中,通过下式选出所有基站信号测量域中相关度之和最大的网格点序号i作为第j个支撑基mj:
36、
37、式中,j表示该步骤执行的次数。
38、进一步地,所述步骤7具体包括以下子步骤:
39、步骤71:对φh中的第mj列元素进行二维泰勒展开得到:
40、
41、通过下式将该分量逼近表达式如下:
42、
43、式中,sh为在网格点处的重构信号,ξx为网格横向补偿值,ξy为网格纵向补偿值;
44、令hh,1=sh,hh,2=ξxsh,hh,3=ξysh,(·)+是moore-penrose伪逆运算,得到:
45、
46、求出sh=hh,1,利用对第mj个网格点位置坐标进行泰勒迭代更新,使其进一步逼近信源所在区域,和为本步骤更新后的坐标值,和为本步骤更新前的坐标值;
47、步骤72:重复步骤71,直至其中表示本次迭代后的yh(t),表示上一次迭代后的yh(t),第一次迭代的等于初始接收信号表示信号子空间在快拍时刻tl对应的数据,ε表示任意小的一个数值,通常取值为10-6;
48、步骤73:计算更新mj对应的字典矩阵列。
49、进一步地,所述步骤8具体包括如下子步骤:
50、步骤81:将支撑基mj存储至支撑基集合ω中,ω初始化为空集;
51、步骤82:通过重构信号,表示重构信号,表示在第h个基站信号测量域中,ω中支撑基对应的网格点的相应字典矩阵列;
52、步骤83:从初始接收信号中减去已经估计出的信号值作为残差rh,
53、进一步地,所述步骤9中,如果ω中元素数量小于信号源数k,则转至步骤4,否则跳转至步骤10。
54、本发明的有益效果是:与现有技术相比,本发明充分利用了同步正交匹配跟踪算法复杂度低、收敛快的特点,提高了直接定位运算速度;在同步正交匹配跟踪算法的迭代过程中,使用泰勒迭代补偿方法进行单点优化,在避免了网格失配问题的同时,提升了网格点位置优化的精度。
- 还没有人留言评论。精彩留言会获得点赞!