对称双边带调制差分调频连续波激光雷达方法及装置
本发明涉及激光雷达,特别涉及一种对称双边带调制差分调频连续波激光雷达方法及装置。
背景技术:
1、调频连续波(fmcw)激光雷达结合调频连续波技术与激光雷达技术,采用线性调频信号对发射激光的频率进行线性调制,通过计算回波光信号和本振光信号的瞬时拍频获得目标距离信息,同时利用多普勒效应对目标进行测速,具有探测灵敏度高、测距测速分辨率高、抗干扰能力强、有利于片上集成等优势,已经在高精度三维成像、遥感测绘和自动驾驶等领域得到了广泛应用。调频连续波激光雷达系统中核心组件是能够产生线性调频光信号的激光光源。该光源可以是内调制激光光源、啁啾脉冲激光光源和外调制激光光源等。线性调频光信号经由光学分束器进行分束,其中一路作为本振光信号,另一路作为探测信号由光学准直系统照射到目标表面。待测目标的反射光信号由光学准直系统接收,通过光学环形器和光学混频器后,与本振光信号混频,进入光电探测器进行相干拍频。最终,信号处理系统从光电探测器的光电流信号中提取目标距离和速度等信息。
2、调频连续波激光雷达的测速和测距均依赖于回波光信号和本振光信号的拍频信号频谱提取,对随机相位噪声是非常敏感的。在理想情况下,一定距离的恒定速度运动目标差拍信号频谱应是一条狭窄的谱线。但是在随机相位噪声的影响下产生随机调频非线性,造成拍频信号的频率不再是单频的,而是具有一定的频谱展宽,导致测量信噪比下降和中频抖动,最终导致系统测量精度和分辨率劣化。随机相位噪声的来源有两个方面,一种是内部噪声,在fmcw激光雷达内部产生,是由激光光源的自发辐射、调频非线性、环境温度起伏、射频器件、相干探测、以及数据采集等因素引入的相位扰动;另一种是外部噪声,由大气湍流、目标散斑、光机结构振动等外界因素引入。
3、相位噪声成为fmcw激光雷达的探测灵敏度、探测精度等关键性能指标的重要影响因素。因此,如何实时补偿相位噪声是调频连续波激光雷达中的是重要问题之一。
4、目前,fmcw激光雷达的相位噪声实时补偿主要有以下几类方法:
5、(1)光电前馈/反馈补偿法:采用辅助参考干涉仪和相干探测,提取出相位噪声,通过前馈或反馈(比如光电锁相环)对相位噪声进行抑制。这是目前较广泛应用的方法。在先技术1(jiayi ke,ziqi song,“phase noise compensation experiment with frequencymodulated continuous wave laser in atmospheric propagation,”opticalengineering,vol.61,issue 7,pp.073101-1,2022)实现了相位噪声补偿,提高了fmcw激光雷达在远距离探测和大气传播条件下的信噪比。在先技术2(jia-yi ke,zi-qi song,pei-si wang,zhong-ming cui,di mo,miao lin,ran wang,and jin wu,long distance highresolution fmcw laser ranging with phase noise compensation and 2d signalprocessing,applied optics,vol.61,issue 12,pp.3443-3454,2022)采用辅助参考干涉仪用于记录源自激光源的相位噪声,以补偿在目标返回光中引起的相位误差。但是该方法结构相对复杂,调节参数较多,对硬件要求较高,对环境要求较苛刻。
6、(2)定频载波和调频子载波差分检测法:在先技术3(h.tsuchida,“differentialfmcw-lidar for breaking the limit of laser coherence,”electronics letters,56(12),614–616,2020)采用电光强度调制同时产生固定频率载波和调频子载波,将载波和子载波送入外差干涉仪,分复用后分别检测输出拍频信号,利用两拍频信号的频率差值来消除激光调频噪声。但是该方法的实施难度比较大。
7、(3)双波长双外差混合法:在先技术4(minglong pu,weilin xie,“dual-heterodyne mixing based phase noise cancellation for long distance dual-wavelength fmcw lidar,”optical fiber communications conference andexhibition,2020)提出了相干双波长fmcw激光雷达方案,利用激光相位相关特性,采用基于双外差混合的相位噪声抵消技术对激光光源线宽相位噪声进行补偿。但是这种方案无法消除调频过程中引入的噪声,而且该方法的实施难度比较大。
8、(4)后期数据处理法:该类方法有较好相位噪声补偿效果,并且无需复杂系统,成本较低。但是当目标物体运动时,相位噪声补偿效果会恶化。
9、以上方法只能一定程度上消除内部噪声的影响,无法消除大气湍流噪声和目标散斑噪声影响。
技术实现思路
1、本发明的目的在于,提供一种对称双边带调制差分调频连续波激光雷达方法及装置。本发明不仅能够有效消除激光光源线宽等因素引入的相位噪声,还可以有效克服大气湍流、散斑和光机结构振动等因素引入的相位噪声的影响,能够提高测距精度,提高测距灵敏度,提高测距范围,提高发射重频,可以实现并行同步测距测速,并具有探测灵敏度高、抗干扰能力强的优点。
2、本发明的技术方案:对称双边带调制差分调频连续波激光雷达方法,在雷达平台的发射端,单频连续激光光源产生的光信号首先经过光学相位调制器,用调频信号与基频信号混频得到射频混频信号,射频混频信号作为光学相位调制器的驱动信号对光信号进行相位调制产生调制激光信号;调制激光信号再经过第一光学分束器分为第一调制光信号和第二调制光信号,第一调制光信号和第二调制光信号分别经过光学带通滤波后,分别同步产生对称边带调制的正负双啁啾激光信号,再分别经过偏振控制器产生正交偏振态的两个调制光;两个调制光再分别进行分束,分别获得第一发射光信号和第一本振光信号以及第二发射光信号和第二本振光信号;将第一发射光信号和第二发射光信号经过偏振合束后进入激光放大器,放大后的两路发射光信号经过共同的光学器件发射至目标并接收两路回波光束;在雷达平台的接收端,返回的两路回波光束经过偏振分集环形器后分别与对应的第一本振光信号和第二本振光信号进行相干混频,然后分别由四通道光电平衡探测器接收获得包含目标距离和矢量速度信息的正交拍频信号,两路正交拍频信号先经过模拟信号处理,实现相位噪声的差分消除,再经adc采样和数字信号处理实现雷达平台与目标之间距离和矢量速度的并行同步测量。
3、上述的对称双边带调制差分调频连续波激光雷达方法,所述单频连续激光光源产生未经调制的激光信号,表示为:
4、e0(t)=e0exp[j2πf0t+jφn_sr(t)+jφ0];
5、式中,f0为激光光源的载波频率;φn_sr(t)为激光光源的噪声相位;φ0为输出光束初始相位;e0是输出光束振幅,t是时间,exp是以自然常数e为底的指数函数。
6、前述的对称双边带调制差分调频连续波激光雷达方法,用调频信号发生器产生的调频信号,用基频信号发生器产生的基频信号,调频信号和基频信号经过混频得到射频混频信号,再经过射频放大后表示为:
7、
8、其中,m是射频电路放大倍数,vrf_m是调频信号的振幅,vrf_b是基频信号的振幅,是调频信号的调频速率,表示为frf_b是基频信号的频率,frf_h是调频信号的高频截止频率,frf_l是调频信号的低频截止频率,t是调频信号的周期,b是调频带宽,φn_rf(t)是混频信号的噪声相位;t是时间;
9、经过射频放大后的射频混频信号作为光学相位调制器的射频驱动信号,对入射激光信号进行相位调制,产生的调制激光信号为:
10、
11、其中,e0_pm是光学相位调制器输出的调制激光信号振幅;f0是激光光源的载波频率;φn_sr(t)为激光光源线宽引入的噪声相位;φ0是激光光源输出的初始相位;是调频信号的调频速率;φn_pm(t)是光学相位调制器引入的噪声相位;φn_rf(t)是射频驱动器件引入的噪声相位;β是光学相位调制器的调相系数,表示为vπ是光学相位调制器的半波电压;t是时间,exp是以自然常数e为底的指数函数;
12、将上式通过贝塞尔函数展开得:
13、
14、其中,jn是第一类n阶贝塞尔函数,n=0,1,2…;其中j0表示光载波,其余jn项则表示调制边带光信号,包括正边带和负边带;单频连续激光光源的功率扩展到了n个调制边带上,这些调制边带的幅度由参数为β的第一类贝塞尔函数的相应阶数控制,并且通过改变调频信号和基频信号的振幅来实现载波抑制。
15、前述的对称双边带调制差分调频连续波激光雷达方法,所述调制激光信号经过第一光学分束器分为第一调制光信号和第二调制光信号;
16、所述第一调制光信号采用第一光学带通滤波器对残余载波和边带进行滤波,使+k阶边带光信号通过,表示为:
17、
18、其中,e1是第一调制光信号振幅,表示为e1=jk(β)e0_pm,e0_pm是光学相位调制器输出的调制激光信号振幅,jk(β)是表示k阶的第一类贝塞尔函数,+k是第一带通滤波单边带级次,β是光学相位调制器的调相系数;t是时间;f0为激光光源的载波频率;为调频速率;t为调频周期;b为调频带宽;φn_sr(t)为激光光源线宽引入的噪声相位;φn_pm(t)是光学相位调制器引入的噪声相位;φn_rf(t)是射频驱动电路引入的噪声相位;exp是以自然常数e为底的指数函数;
19、用φn1(t)表示第一调制光信号的噪声相位:
20、φn1(t)=φn_sr(t)+φn_pm(t)+kφn_rf(t);
21、经过光学滤波后的第一调制光信号先经过第一偏振控制器,再经过第二光学分束器分为第一发射光信号和第一本振光信号,其中小部分能量作为第一本振光信号,第一本振光信号为时间延迟τl1的线性调频信号,光场表示为:
22、
23、其中,elo1是第一本振光信号振幅;
24、经过偏振态调整的第一调制光信号的大部分能量作为第一发射光信号,与具有正交偏振态的第二发射光信号通过偏振光合束器进行合束和激光放大后,再经过偏振分集光学环形器,通过光学扫描器和发射/接收光学望远镜发射至目标,从目标返回的第一目标回波信号为时间延迟τs1的线性调频信号,光场表示为:
25、
26、其中,es1是第一回波光信号振幅,φn1_oa是第一发射光信号由于光学放大器引入的噪声相位;φns1是第一回波光信号由于目标散斑、大气湍流和光机结构振动等因素造成的噪声相位;
27、第一回波信号的时间延迟τs1与第一本振光信号的时间延迟τl1表示为:
28、
29、其中,c是光速,r是目标距离,v是雷达平台与目标相对运动径向速度;
30、所述第二调制光信号采用第二光学带通滤波器对残余载波和边带进行滤波,使-k阶边带光信号通过,表示为:
31、
32、其中,e2是第二调制光信号振幅,表示为e2=jk(β)e0_pm,e0_pm是光学相位调制器输出的调制激光信号振幅,jk(β)是表示k阶的第一类贝塞尔函数,-k是第二带通滤波单边带级次,β是光学相位调制器的调相系数;t是时间;f0为激光光源的载波频率;为调频速率;t为调频周期;b为调频带宽;φn_sr(t)为激光光源线宽引入的噪声相位;φn_pm(t)是光学相位调制器引入的噪声相位;φn_rf(t)是射频驱动电路引入的噪声相位;exp是以自然常数e为底的指数函数;
33、用φn2(t)表示第二调制光信号的噪声相位:
34、φn2(t)=φn_sr(t)+φn_pm(t)-kφn_rf(t);
35、经过光学滤波后的第二调制光信号先经过第二偏振控制器,再经过第三光学分束器分为第二发射光信号和第二本振光信号,其中小部分能量作为第二本振光信号,第二本振光信号为时间延迟τl2的线性调频信号,光场表示为:
36、
37、其中,elo2是第一本振光信号振幅;
38、经过偏振态调整的第二调制光信号的大部分能量作为第二发射光信号,与具有正交偏振态的第一发射光信号通过偏振光合束器进行合束和激光放大后,再经过偏振分集光学环形器,通过光学扫描器和发射/接收光学望远镜发射至目标,从目标返回的第二目标回波信号为时间延迟τs2的线性调频信号,光场表示为:
39、
40、其中,es2是第二回波光信号振幅,φn2_oa(t)是第二发射光信号由于光学放大器引入的的噪声相位;φns2是第二回波光信号由于目标散斑、大气湍流和光机结构振动等因素造成的噪声相位;
41、第二回波光信号的时间延迟τs2与第二本振光信号的时间延迟τl2表示为:
42、
43、由于第一发射光信号和第二发射光信号是同轴发射和接收,即τs1=τs2,τl1=τl2,则
44、第一发射光信号和第二发射光信号经过相同的光放大器,引入的相位噪声相同,即φn_oa=φn1_oa=φn2_oa;两个回波光信号受到的目标散斑、大气湍流和光机结构振动等因素的影响近似相同,即φns=φns1=φns2。
45、前述的对称双边带调制差分调频连续波激光雷达方法,所述相干混频是第一回波光信号与第一本振光信号合束得到的第一合束光表示为:
46、
47、第一合束光经过第一光学桥接器混频后的4路输出分别为:
48、
49、其中,表示雷达平台与目标相对运动引起的多普勒频移;
50、再由第一光电平衡探测器进行接收,经过带通滤波后,获取第一正交拍频信号:
51、
52、其中,σin_1是i通道的第一光电探测器的响应率,σqu_1是q通道的第一光电探测器的响应率;
53、所述第二回波信号与第二本振光信号合束得到的第二合束光表示为:
54、
55、第二合束光经过第二光学桥接器混频后的4路输出分别为:
56、
57、其中,表示雷达平台与目标相对运动引起的多普勒频移;
58、由第二光电平衡探测器进行接收,经过带通滤波后,获取第二正交拍频信号为:
59、
60、其中,σin_2是i通道的第二光电探测器的响应率,σqu_2是q通道的第二光电探测器的响应率;
61、由于偏振分集,第一调制光信号和第二调制光信号之间通过偏振实现串扰隔离,并且若两调制光信号的基频差远大于多普勒频移,通过低通滤波进行消除,实现串扰抑制。
62、前述的对称双边带调制差分调频连续波激光雷达方法,所述的模拟信号处理步骤如下:
63、首先,四路拍频信号两两模拟相乘运算,表示为:
64、
65、
66、
67、
68、令σin_1σin_2=σqu_1σqu_2=σin_1σqu_2=σqu_1σin_2=λ,再通过两两模拟相加和相减运算,得到三个模拟通道输出信号:
69、
70、
71、
72、上式中,ia1(t)是包含目标距离的量,ia2(t)和ia3(t)是包含目标多普勒信息的量;
73、在ia1(t)中,通过对称双边带调制差分处理,已经完全消除了激光光源线宽引入的噪声相位、光学相位调制器引入的噪声相位、射频放大器输出的噪声相位、目标散斑噪声、大气湍流噪声和光机结构振动噪声;余下的由射频驱动电路引入的噪声相位通过优化射频器件予以抑制。
74、前述的对称双边带调制差分调频连续波激光雷达方法,所述的雷达平台与目标之间距离和矢量速度的并行同步测量是:
75、第一模拟通道的拍频信号进行快速傅里叶变换,并通过重心法提取频谱峰值位置,得到中频fif1;
76、第二模拟通道和第三模拟通道经过复数化得:
77、
78、复数化拍频信号进行快速傅里叶变换,并通过重心法提取频谱峰值位置,得到中频fif2;
79、两中频分别表示为:
80、由上式得到雷达平台与目标相对运动径向速度的大小和方向,表示为:
81、其中,正值代表雷达平台与目标相向运动,负值代表雷达平台与目标相背运动;
82、由上式还得到激光雷达与目标点的距离:
83、同时测距分辨率表示为:
84、测速分辨率表示为:
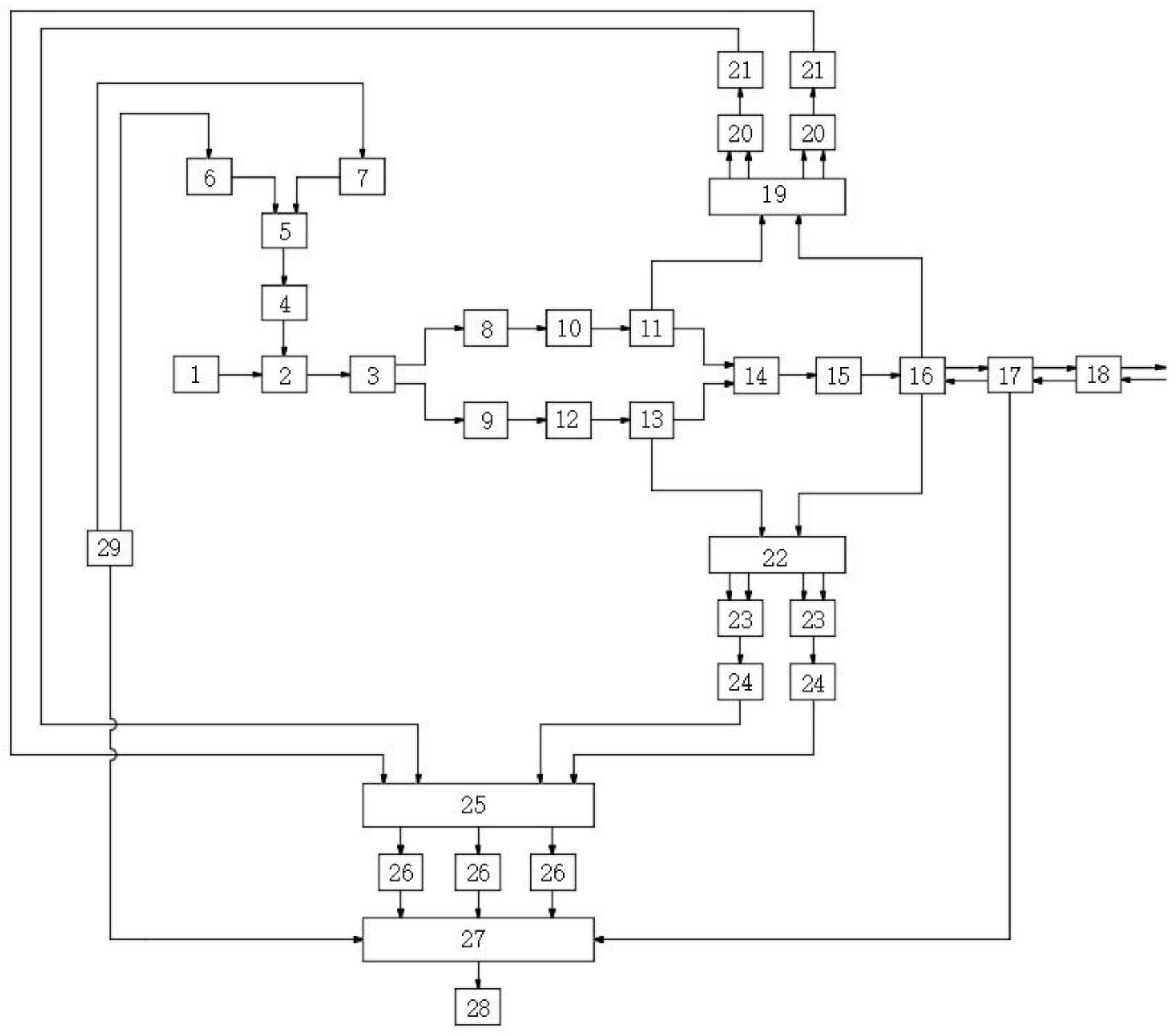
85、实现前述的对称双边带调制差分调频连续波激光雷达方法的装置,包括单频连接激光光源,单频连接激光光源连接有光学相位调制器;所述光学相位调制器分别连接有第一光学分束器和射频放大器;所述射频放大器连接有射频混频器,射频混频器连接有调频信号发生器和基频信号发生器;所述第一光学分束器分别连接有第一光学带通滤波器和第二光学带通滤波器;所述第一光学带通滤波器经第一偏振控制器连接有第二光学分束器;所述第二光学带通滤波器经第二偏振控制器连接有第三光学分束器;所述第二光学分束器和第三光学分束器一同连接有偏振光合束器,偏振光合束器经激光放大器连接有偏振分集光学环形器,偏振分集光学环形器经光学扫描器连接有发射接收望远镜;所述第二光学分束器和偏振分集光学环形器一同连接有第一光学桥接器,第一光学桥接器经第一光电平衡探测器连接有第一带通滤波器;所述第三光学分束器和偏振分集光学环形器一同连接有第二光学桥接器,第二光学桥接器经第二光电平衡探测器连接有第二带通滤波器;所述第一带通滤波器和第二带通滤波器一同连接有模拟信号处理单元,模拟信号处理单元连接有三个模数转换器,三个模数转换器一同连接有数字信号处理单元,数字信号处理单元连接有上位计算机;所述数字信号处理单元连接有外触发电路,外触发电路分别与调频信号发生器和基频信号发生器连接;所述数字信号处理单元还与光学扫描器连接。
86、与现有技术相比,本发明采用统一调制和对称阶次滤波的方法,同步产生对称边带调制的正负双啁啾正交偏振激光信号,再经过各自相干接收分别产生正交拍频信号,并对双正交拍频信号进行模拟信号处理,效果上能够通过差分处理,完全消除了激光光源线宽引入的噪声相位、光学相位调制器引入的噪声相位、射频放大器输出的噪声相位、目标散斑噪声、大气湍流噪声和光机结构振动噪声,能够提高测距精度,提高测距灵敏度,提高测距范围,提高发射重频,可以实现并行同步测距测速。可见,本发明具有测距精度高、灵敏度好、抗干扰能力强的优点,能够实现远距离散射目标的高精度测距,并同时具备测速功能。在机载和星载测绘雷达等领域具有良好的发展前景。
- 还没有人留言评论。精彩留言会获得点赞!