一种非接触式变焦三维测振传感器系统的制作方法
本发明涉及振动测量,尤其是指一种非接触式变焦三维测振传感器系统。
背景技术:
1、调频连续波(fmcw,frequency modulated continuous wave)测距法,其原理是发送具有一定带宽、频率线性变化的连续信号,再对接收到的连续信号进行快速傅里叶变换,通过发送与接收信号的频率差来计算两个信号的时间差,最后由时间差得到对应的距离值。fmcw法基于相干原理,具有很强的抗干扰,以及拥有较高信噪比的优势而被广泛关注。由于其高精度测量,开始被广泛应用于振动物体的振动测量,从而获得被测物体的加速度值。而现有的基于fmcw法的三维测振系统大多存在结构复杂,成本高的问题。
技术实现思路
1、为此,本发明所要解决的技术问题在于提供一种结构合理、操作简单、成本低的非接触式变焦三维测振传感器系统。
2、为解决上述技术问题,本发明提供了一种非接触式变焦三维测振传感器系统,该非接触式变焦三维测振传感器系统包括:
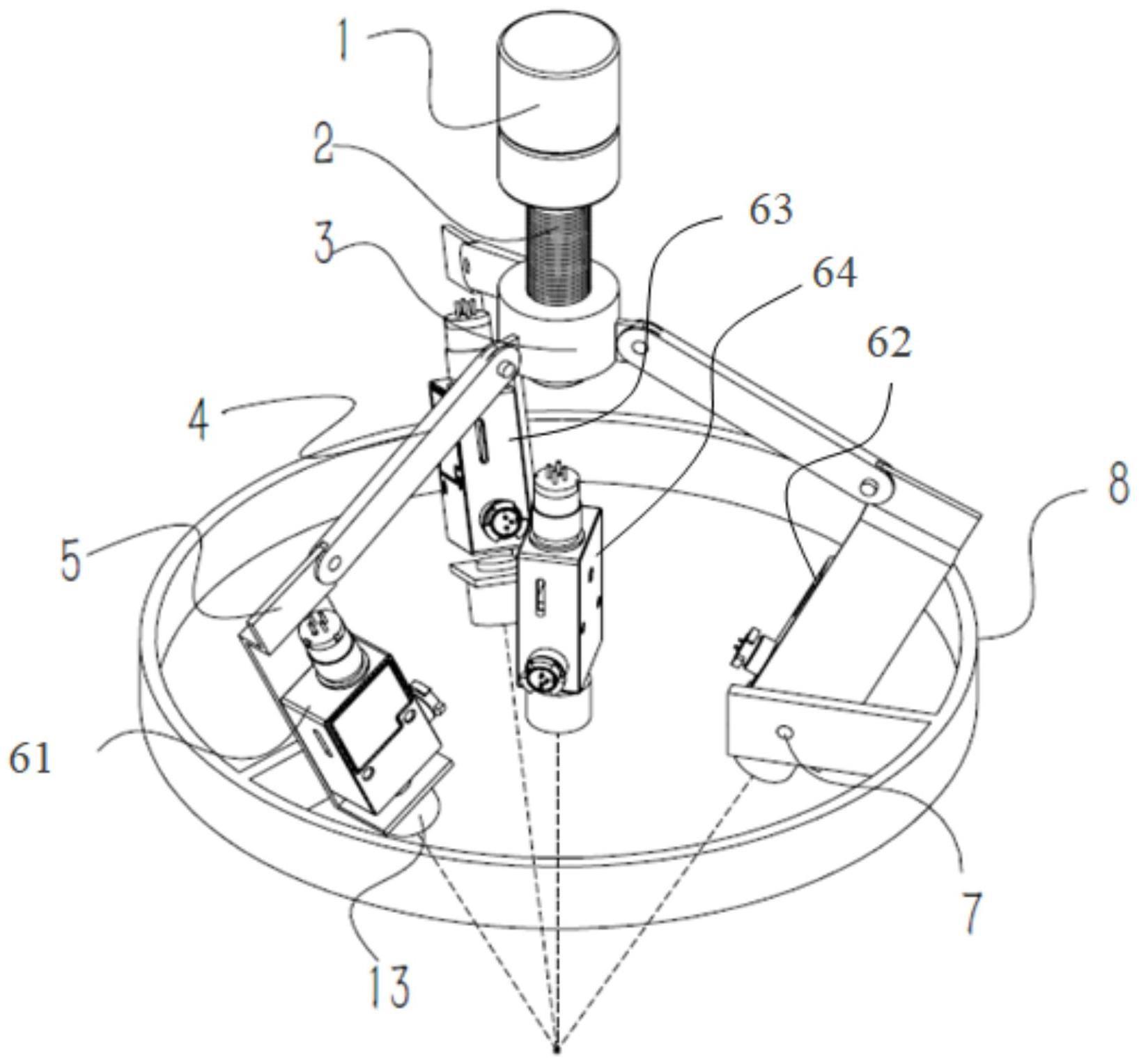
3、第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块和第四光芯片测量模块,所述第一光芯片测量模块、第二光芯片测量模块和第三光芯片测量模块呈三角形设置,所述第一光芯片测量模块、第二光芯片测量模块和第三光芯片测量模块所确定的圆记为目标圆,所述目标圆所在的面记为目标面,经过所述目标圆的中心且垂直于所述目标面的轴记为中心轴;
4、所述第四光芯片测量模块用于向被测振动物体发射与所述中心轴重合的激光以测量被测振动物体到所述目标面的距离;
5、驱动组件,所述驱动组件与所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块连接,所述驱动组件用于根据被测振动物体到所述目标面的距离驱动所述第一光芯片测量模块、第二光芯片测量模块和第三光芯片测量模块同步运动,使所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块发出的激光与所述第四光芯片测量模块发出的激光汇聚于不同距离被测振动物体上同一点,以实现可变焦测量,所述第一光芯片测量模块、第二光芯片测量模块和第三光芯片测量模块用于根据被测振动物体反射的激光计算被测振动物体的三维振动值。
6、在本发明的一个实施例中,所述第一光芯片测量模块、第二光芯片测量模块和第三光芯片测量模块呈等边三角形设置,所述第四光芯片测量模块位于所述目标圆的中心。
7、在本发明的一个实施例中,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块与所述中心轴的夹角为θ,测量得到被测振动物体到所述目标面的距离为d,将所述第一光芯片测量模块发出的激光在xy平面的投影与x轴重合,所述中心轴与z轴重合,得到第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块发出的激光分别与x、y、z轴的夹角如下:
8、θx1=π/2-θ,θy1=π/2,θz1=θ,
9、
10、
11、θ=arctan(r/d)
12、其中,r为第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块到中心轴的距离,θx1、θy1、θz1分别为第一光芯片测量模块发出的激光与x轴、y轴、z轴的夹角,θx2、θy2、θz2分别为第二光芯片测量模块发出的激光与x轴、y轴、z轴的夹角,θx3、θy3、θz3分别为第三光芯片测量模块发出的激光与x轴、y轴、z轴的夹角;
13、并通过以下公式计算被测振动物体的三维振动值:
14、d1=vxcos(θx1)+vy cos(θy1)+vz cos(θz1)
15、d2=vxcos(θx2)+vycos(θy2)+vzcos(θz2)
16、d3=vxcos(θx3)+vy cos(θy3)+vz cos(θz3)
17、其中,d1、d2、d3分别为第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块测量得到的被测振动物体沿各自激光方向的位移值;vx、vy、vz分别为测振动物体沿x、y、z轴的三维振动值。
18、在本发明的一个实施例中,还包括保持架,所述保持架上设有三个安装座,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块分别通过转轴与对应的安装座转动连接,所述驱动组件用于驱动所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块沿对应的转轴同步转动。
19、在本发明的一个实施例中,所述驱动组件包括电机、丝杆、滑块、三个连杆,所述电机与丝杆连接,所述滑块与丝杆螺纹连接,所述滑块通过三个连杆分别与所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块连接,所述电机可带动丝杆转动,所述丝杆转动带动所述滑块沿丝杆轴向运动,所述滑块通过连杆带动所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块沿对应的转轴同步转动。
20、在本发明的一个实施例中,所述保持架为圆形或等边三角形。
21、在本发明的一个实施例中,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块结构相同,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块均包括测量激光发射源和引导激光发射源,所述测量激光发射源用于发射不可见激光作为测量激光,所述引导激光发射源用于发射可见激光作为引导激光,所述引导激光用于对测量激光调焦。
22、在本发明的一个实施例中,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块均还包括plc芯片、波分复用器、光电探测器;
23、所述波分复用器用于将经过plc芯片的测量激光发射源和引导激光发射源发出的激光汇合形成光载波一起向外发射,实现测量激光与引导激光的同轴;
24、所述波分复用器用于将反射的测量激光和引导激光的光载波分离,分离出的测量激光到达plc芯片与之前测量激光发射源发出的入射至plc芯片的测量激光进行干涉,之后到达光电探测器进行被测振动物体的三维振动值计算。
25、在本发明的一个实施例中,所述第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块均还包括准直透镜,所述准直透镜可移动以实现引导激光在被测振动物体上调焦,从而实现对测量激光调焦。
26、在本发明的一个实施例中,所述引导激光发射源可在对测量激光调焦后关闭。
27、本发明的上述技术方案相比现有技术具有以下优点:
28、本发明的非接触式变焦三维测振传感器系统利用第四光芯片测量模块向被测振动物体发射与所述中心轴重合的激光以测量被测振动物体到目标面的距离,利用驱动机构驱动第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块同步运动,使第一光芯片测量模块、第二光芯片测量模块、第三光芯片测量模块发出的激光与第四光芯片测量模块发出的激光汇聚于被测振动物体上同一点,以实现可变焦测量,并根据被测振动物体反射的激光计算被测振动物体的三维振动值。本发明的非接触式变焦三维测振传感器系统可以根据被测振动物体的距离进行调节,实现对不同距离被测振动物体的测量,扩宽了其测量范围,使测量范围不受距离约束,同时,具有结构简单、操作方便、成本低的优点,并有效保证测量精度。
29、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!