一种播种均匀性变异系数测量系统及方法
本发明涉及农业机械鉴定领域,具体涉及一种播种均匀性变异系数测量系统及方法。
背景技术:
1、随着现代农业技术的发展,精密播种作业需求越来越高。相关企业、研发机构研制了适应不同作物的精密播种机。播种机在推向市场之前,需要获得农机鉴定部门颁发的性能参数鉴定证书。播种机的播种均匀性变异系数是农机鉴定部门重点测量的性能参数。
2、目前,对播种均匀性变异系数的测量主要依靠人工方式完成。播种机将种子播入土壤表层后,测量人员在土壤表层划出矩形采样区域,通过人工目测方式得到采样区域的种子粒数,然后按照《农业机械推广鉴定大纲dg/t 027-2019》中播种均匀性变异系数计算公式,计算出该参数。但是该方法主要依靠人工目测和尺规测量,工作量大,工作效率低,而且容易出错。
技术实现思路
1、本发明的目的在于提供一种播种均匀性变异系数测量系统及方法,解决了传统的播种均匀性变异系数测量方法主要依靠人工,精准度不高而且效率低下的问题。
2、为实现上述目的,根据本发明的一个方面,本发明提供一种播种均匀性变异系数测量系统,该测量系统由工控机、双目相机、蓝光光源、光源控制器、照度传感器和黑色绒布组成;
3、工控机,其作为系统计算核心,至少具有1个usb3.0接口和一个rs485接口,测量系统连接时,工控机通过usb3.0接口与双目相机相连接,并同时通过rs485总线与光源控制器和照度传感器相连接;
4、蓝光光源,与光源控制器相连接,用于去除环境噪声干扰;
5、黑色绒布,用于制造纯色背景,方便图像处理。
6、优选地,所述蓝光光源波长为470nm。
7、优选地,所述绒布的绒毛长度10~12mm。
8、根据本发明的另一个方面,本发明提供一种播种均匀性变异系数测量方法,应用前述的测量系统来实现测试,该测量方法包括如下步骤:
9、准备工作:
10、1)将播种机置于高于地面的导轨或架子上,黑色绒布水平铺在播种机的正下方;
11、2)播种机在牵引机械的作用下边前进边播种,种子播出后,落在黑色绒布表面;
12、3)双目相机以俯仰角-45°~-60°、高度1.0m布设安装于黑色绒布正上方,双目相机采集黑色绒布表面种子图像,并将采集到的图像传输到工控机中;
13、4)工控机控制光源控制器从低到高增加光源强度,同时观测种子图像的边缘,当种子图像的边缘由模糊变为清晰时,停止增加光源强度;
14、5)工控机从照度传感器采集当前蓝光照度值,定义为最佳蓝光光源强度,作为下次工作的参考值;
15、测量工作:
16、6)在最佳蓝光光源强度下,工控机控制双目相机采集绒布工作区域种子图像,同时工控机采集当前状态下双目相机内置姿态传感器数据,获取相机姿态参数,包括航向角h、俯仰角p、翻滚角r;
17、7)对种子图像进行滤波、去噪、二值化处理后,计算出图像中所有连通区域面积,根据面积阈值筛选出种子,并计算种子的个数以及种子形心的二维坐标,组成矩阵m,其中m为n行2列,n为种子个数;
18、8)利用相机的深度测量功能,将种子形心的二维坐标转换为对应的三维坐标,组成矩阵w,其中w为n行3列,三维坐标原点在左相机光心,从左相机光心到右相机光心的连线为x轴正方向,利用右手定则将x轴在成像面内顺时针旋转90°为y轴正方向,拇指方向即为z轴正方向;
19、9)通过调整相机姿态参数,对w矩阵进行旋转,使各点坐标回到初始坐标系下,得到w'矩阵,即为:
20、w'=r-1wt
21、
22、r11=cos(h)cos(r)
23、r12=cos(h)sin(r)
24、r13=-sin(h)
25、r21=-cos(p)sin(r)+sin(p)sin(h)cos(r)
26、r22=cos(p)cos(r)+sin(p)sin(h)sin(r)
27、r23=sin(p)cos(h)
28、r31=sin(p)sin(r)+cos(p)sin(h)cos(r)
29、r32=-sin(p)cos(r)+cos(p)sin(h)sin(r)
30、r33=cos(p)cos(h)
31、同时,为了使得初始坐标系航向角与当前方向一致,令上式中航向角h=0;
32、10)由于绒布铺在近似水平的地面上,因此w'矩阵中的坐标向x'oz'平面投影,并不会影响种子的水平间距,种子的三维空间分布可用其平面的投影坐标表示,即在绒布平面上,每粒种子的坐标均可用其x'、z'坐标表示;
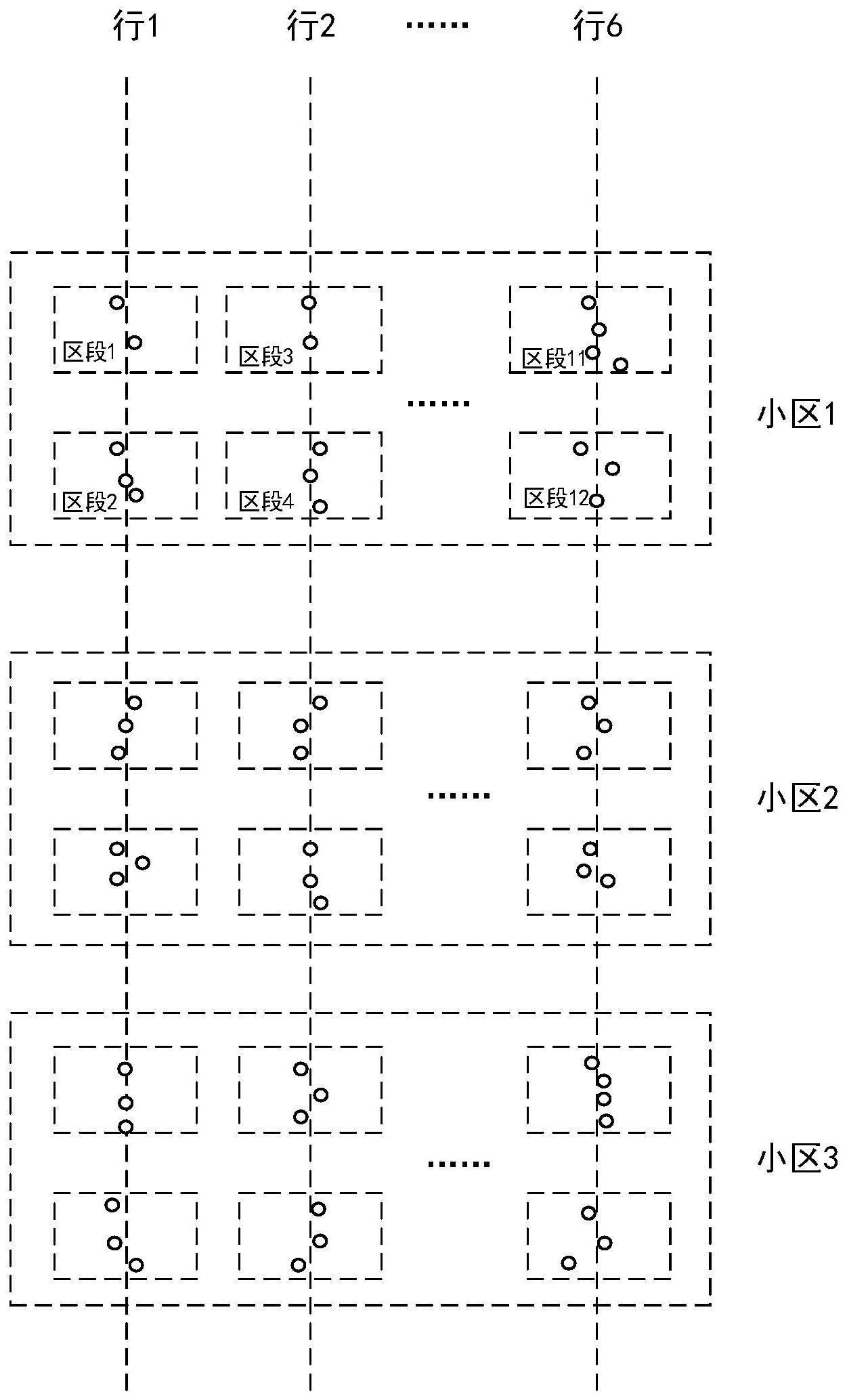
33、11)在平面上划定3个矩形小区,每个小区在横向上需要包含6行种子,纵向尺寸为400mm,小区内每行种子再划出两个矩形区段,区段横向尺寸为300mm,纵向尺寸为100mm;
34、12)由于每粒种子x'oz'平面的投影坐标已知,即可确定每粒种子是否在划定小区的内部;
35、而后,通过计算机自动计算各小区每区段的种子数量以及各小区每区段种子的平均数量xi,其中,i表示小区编号,取值为1~3,那么播种均匀性变异系数v可表示为:
36、
37、其中,
38、优选地,步骤9)中初始坐标系的定义为:原点在左相机光心,航向角与当前方向一致、俯仰角和翻滚角均为0,水平向右为x’轴,按照右手定则,垂直向下为y’轴,拇指方向为z’轴。
39、与现有技术相比,本发明的有益效果是:
40、本发明,能够通过机器视觉自动计算每粒种子的三维空间坐标,并将三维坐标恢复到初始坐标系下后再进行二维投影,以降低坐标维数方便计算。同时,根据其投影坐标、小区和区段的位置关系,自动计算每个小区内各段矩形区域内种子数量,实现快速准确计算播种均匀性变异系数。方法易操作,能够提升工作效率和精度。
技术特征:
1.一种播种均匀性变异系数测量系统,其特征在于,该测量系统由工控机、双目相机、蓝光光源、光源控制器、照度传感器和黑色绒布组成;
2.根据权利要求1所述的一种播种均匀性变异系数测量系统,其特征在于,所述蓝光光源波长为470nm。
3.根据权利要求1所述的一种播种均匀性变异系数测量系统,其特征在于,所述绒布的绒毛长度10~12mm。
4.一种播种均匀性变异系数测量方法,应用权利要求1-3任一所述的测量系统来实现测试,其特征在于,该测量方法包括如下步骤:
5.根据权利要求4所述的一种播种均匀性变异系数测量方法,其特征在于,所述步骤9)中初始坐标系的定义为:原点在左相机光心,航向角与当前方向一致、俯仰角和翻滚角均为0,水平向右为x’轴,按照右手定则,垂直向下为y’轴,拇指方向为z’轴。
技术总结
本发明公开了一种播种均匀性变异系数测量系统及方法,涉及农业机械鉴定领域,该测量系统由工控机、双目相机、蓝光光源、光源控制器、照度传感器和黑色绒布组成;工控机,其作为系统计算核心,至少具有1个USB3.0接口和一个RS485接口,测量系统连接时,工控机通过USB3.0接口与双目相机相连接,并同时通过RS485总线与光源控制器和照度传感器相连接。本发明,能够通过机器视觉自动计算每粒种子的三维空间坐标,并将三维坐标恢复到初始坐标系下后再进行二维投影,以降低坐标维数方便计算,并根据其投影坐标、小区和区段的位置关系,自动计算每个小区内各段矩形区域内种子数量,实现快速准确计算播种均匀性变异系数。方法易操作,能够提升工作效率和精度。
技术研发人员:王超柱,杨浩勇,丁永前,田光兆,陶雷,张婕
受保护的技术使用者:南京农业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!