一种基于智能全站仪的控制网快速复测装置及方法
本发明属于工程测量领域,主要涉及一种基于智能全站仪的控制网快速复测装置及方法。
背景技术:
1、工程控制网是指为工程建设布设的专用测量控制网,可以满足各类工程建设、施工放样、安全监测等工程需求。在完成控制网测量任务后,为了保证控制网精度,在项目中需要对控制网点进行定期复测。控制网复测的目的是获得新的坐标和高程。目前行业内主流的控制网复测方法是采用智能全站仪进行控制网复测,当智能全站仪在不同控制网点之间轮换时,需要人工调整对应各目标棱镜的朝向,但通常各控制网点距离较远,操作费时费力。如果能够改装一种多功能棱镜,安装在各控制网点,观测人员可以利用远程控制装置自动控制各棱镜的水平及竖直旋转使之朝向仪器。同时该装置可读取气象信息用于对距离观测值的改正,便于智能全站仪完成观测任务,由此实现控制网的快速复测。本发明对于提高工程测量的效率有着重要意义。
技术实现思路
1、针对现有技术存在的上述问题,本发明提供了一种基于智能全站仪的控制网快速复测装置及方法。在控制网的各控制网点架设多功能棱镜,当全站仪在不同控制网点之间轮换时,利用架设智能全站仪的控制网点处的无线控制端,根据各控制网点已有的往期坐标信息,结合读取对应的目标棱镜装置的初始方位信息,控制多功能棱镜的舵机水平及竖直旋转使之朝向智能全站仪,实现控制网的快速自动复测,节省复测的人力物力。
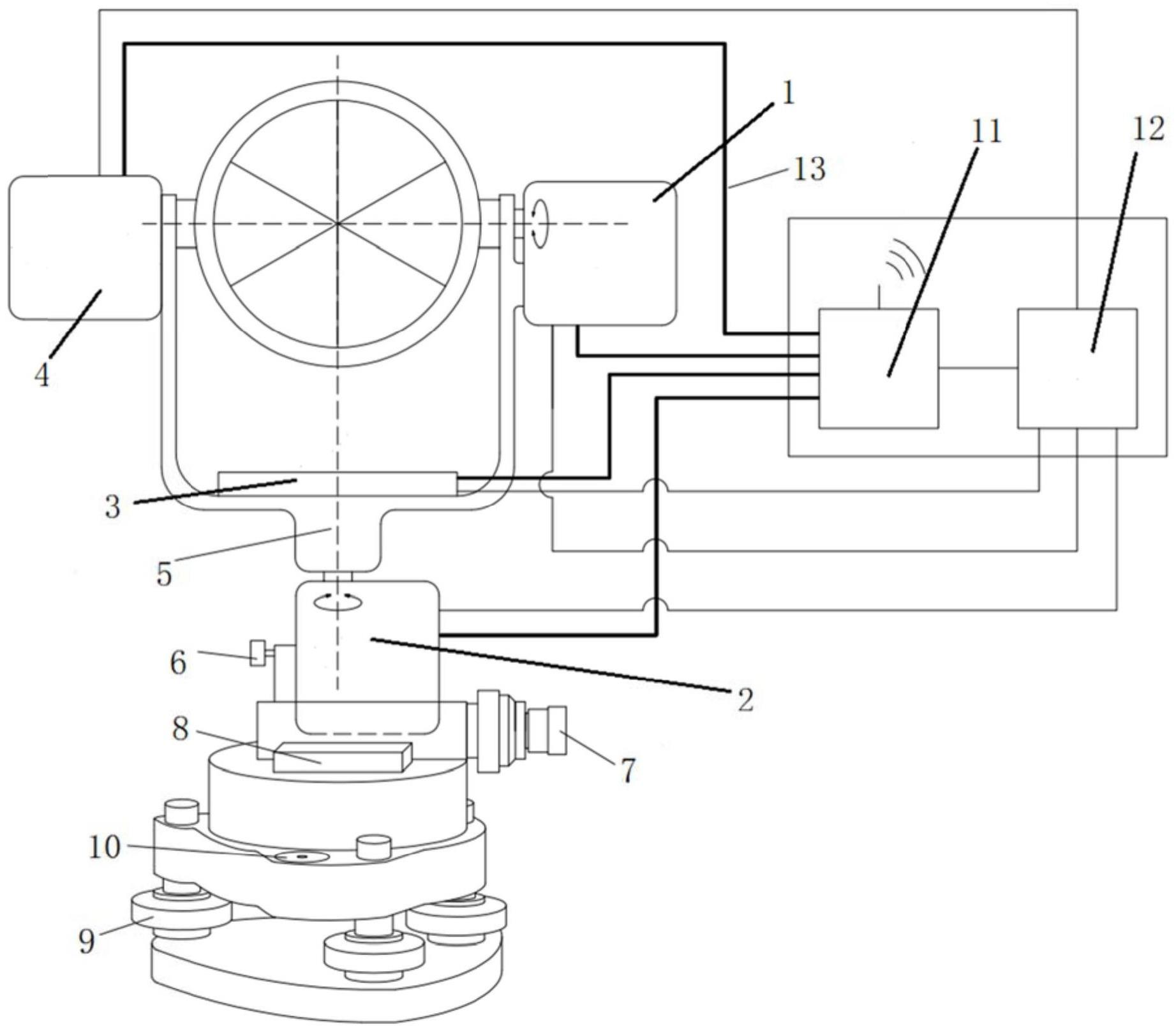
2、本发明的上述技术问题主要是通过下述技术方案得以解决的:根据本发明的第一方面,本发明提供一种基于智能全站仪的控制网快速复测装置,包括多功能棱镜,所述多功能棱镜包括:
3、棱镜支架,所述棱镜支架上设置有竖直舵机、水平舵机、电子罗盘和气象传感单元;其中,
4、竖直舵机,安装在棱镜支架的一侧,其输出转轴与棱镜支架的水平中心轴连接,提供竖直方向的扭矩,控制棱镜竖直方向的旋转;
5、水平舵机,固定在棱镜基座上,其输出转轴与棱镜支架的竖直中心轴连接,提供水平方向的扭矩,控制棱镜水平方向的旋转;
6、电子罗盘,水平安装在棱镜支架上并与棱镜支架的水平朝向保持一致;
7、气象传感单元,安装在棱镜支架远离竖直舵机的另一侧,用来读取棱镜周围的气象信息。
8、优选地,所述气象传感单元、竖直舵机、水平舵机、电子罗盘均通过通讯数据线与无线终端连接,无线终端连接负责接收来自无线控制端的命令并向无线控制端反馈数据。
9、优选地,所述气象传感单元、竖直舵机、水平舵机、电子罗盘和所述无线终端均与供电单元连接,所述供电单元可重复充电。
10、优选地,所述水平舵机的底端设置有基座,所述基座包括光学对中器和脚螺旋,所述光学对中器安装在脚螺旋上,在所述基座上靠近光学对中器的位置设置有管水准气泡,在所述脚螺旋上的顶端设置有圆水准气泡。
11、根据本发明的第二方面,本发明提供一种基于智能全站仪的控制网快速复测方法,应用于上述所述的多功能棱镜,所述复测方法包括以下步骤:
12、对于有n个控制网点的控制网,在各控制网点上安装多功能棱镜,并记录各控制网点与多功能棱镜的对应关系;
13、在控制网上任选一控制网点作为测站点,所述测站点观测范围内的控制网点称为目标点,取下该测站点处的多功能棱镜,架设智能全站仪,测站点处的无线控制端根据各目标点的往期坐标,计算各目标点与测站点之间竖直角和水平夹角之间的空间关系,根据所述空间关系将观测范围内目标点的多功能棱镜全部朝向智能全站仪;
14、智能全站仪捕捉到观测范围内的任一目标后,根据观测范围内目标点的往期坐标和所述空间关系并结合自动目标识别功能对其它各目标点展开复测;
15、当完成此次复测任务时,回收全部多功能棱镜;当未完成此次复测任务时,将所述测站点复原,并轮换至下一个测站点展开观测。
16、优选地,所述测站点处的无线控制端根据各目标点的往期坐标,计算各目标点与测站点之间竖直角和水平夹角之间的空间关系,根据所述空间关系将观测范围内目标点的多功能棱镜全部朝向智能全站仪包括:
17、计算得到目标点处的多功能棱镜的水平舵机需要旋转的水平角度值和计算得到目标点处的多功能棱镜的竖直舵机需要旋转的竖直角度值;
18、根据计算得到的水平角度值和竖直角度值,无线控制端发送命令控制对应的多功能棱镜的水平舵机和竖直舵机进行旋转,使目标棱镜朝向测站点,之后智能全站仪开始执行该测站的观测任务;
19、其中,计算水平角度值代入公式:
20、
21、θi表示为水平角度值,βi表示为测站点与目标点i之间的坐标方位角,
22、表示为获取的目标点i处多功能棱镜的电子罗盘数值;
23、计算竖直角度值代入公式:
24、αi表示为竖直角度值;
25、yi表示为目标点i的往期y轴坐标;ys表示为测站点的往期y轴坐标;xi表示为目标点i的往期x轴坐标;xs表示为测站点的往期x轴坐标。
26、优选地,所述控制网的坐标系选用高斯投影直角坐标系或独立坐标系。
27、优选地,所述智能全站仪捕捉到观测范围内的任一目标后,根据观测范围内目标点的往期坐标和所述空间关系并结合自动目标识别功能对其它各目标点展开复测包括:若观测范围内视野良好或者处于各控制网点视距范围处时,
28、确定该测站点的至少一个目标点的大致方位,将测站点处的智能全站仪瞄准该目标点进行一次观测,根据观测的距离信息,结合往期坐标数据,确定瞄准的控制网点的编号,并计算出与其余目标点的水平夹角关系,进而展开自动观测。
29、优选地,所述智能全站仪捕捉到观测范围内的任一目标后,根据观测范围内目标点的往期坐标和所述空间关系并结合自动目标识别功能对其它各目标点展开复测还包括:若观测范围内各控制网点超出视距范围之外,测量员无法确定该测站点的任一目标点的大致方位时,
30、根据往期坐标数据计算测站点与其最近的目标点的竖直角,然后旋转智能全站仪的照准部至竖直角并固定,根据搜索功能沿水平面旋转一周进行目标棱镜的搜索,当找到目标棱镜之后即展开自动观测。
31、优选地,所述当找到目标棱镜之后即展开自动观测之后,还包括:
32、自动观测时无线控制端发送命令获取各目标点处的气象传感单元采集温度、湿度、气压信息,联合其自身采集的气象信息对各距离观测值进行改正,当完成该测站的观测任务之后,无线控制端发送命令使各目标处的多功能棱镜的竖直舵机方向归零,将多功能棱镜复原到控制网点上,进行下一个控制网点展开观测,直至完成所有控制网点的观测。
33、本发明的优点在于:
34、针对控制网复测时,由于各控制网点距离较远导致的操作费时费力这一问题,本发明通过构造多功能棱镜安装在各控制网点,利用测站处的无线控制端和目标点处的无线终端,可实现自动控制目标棱镜朝向智能全站仪,有效改善了以往控制网复测时需要同时存在较多作业人员而导致的窝工等现象的管理技术问题,有助于提高控制网复测的效率,节省控制网复测耗费的人力物力。此外,目前行业内控制网点普遍布置在山区,仅依靠简易山道互通,山高路陡,交通不便,本发明所述方法在理想条件下只需单人携带设备经过控制网点三遍即可完成复测任务,有效减少了以往控制网复测时需搬运仪器走山路而存在的人员安全以及仪器损耗等系列不确定因素。这对于提高工程测量的效率和自动化程度有着重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!