一种基于激光距离传感器的尺寸测量装置及方法与流程
本发明涉及尺寸测量,特别是一种基于激光距离传感器的尺寸测量装置及方法。
背景技术:
1、在房屋建筑施工完成后,交付验收前,各建筑商需对房屋的层高和开间距离进行测量,作为房屋的分户验收资料移交。目前工程上主要通过人工持卷尺测量,效率低,精度差。虽然部分企业采用激光测距仪,但因人工操作难以确保垂直测量面测量,误差大。
技术实现思路
1、本发明的目的在于克服现有技术的缺点,提供一种基于激光距离传感器的尺寸测量装置及方法。
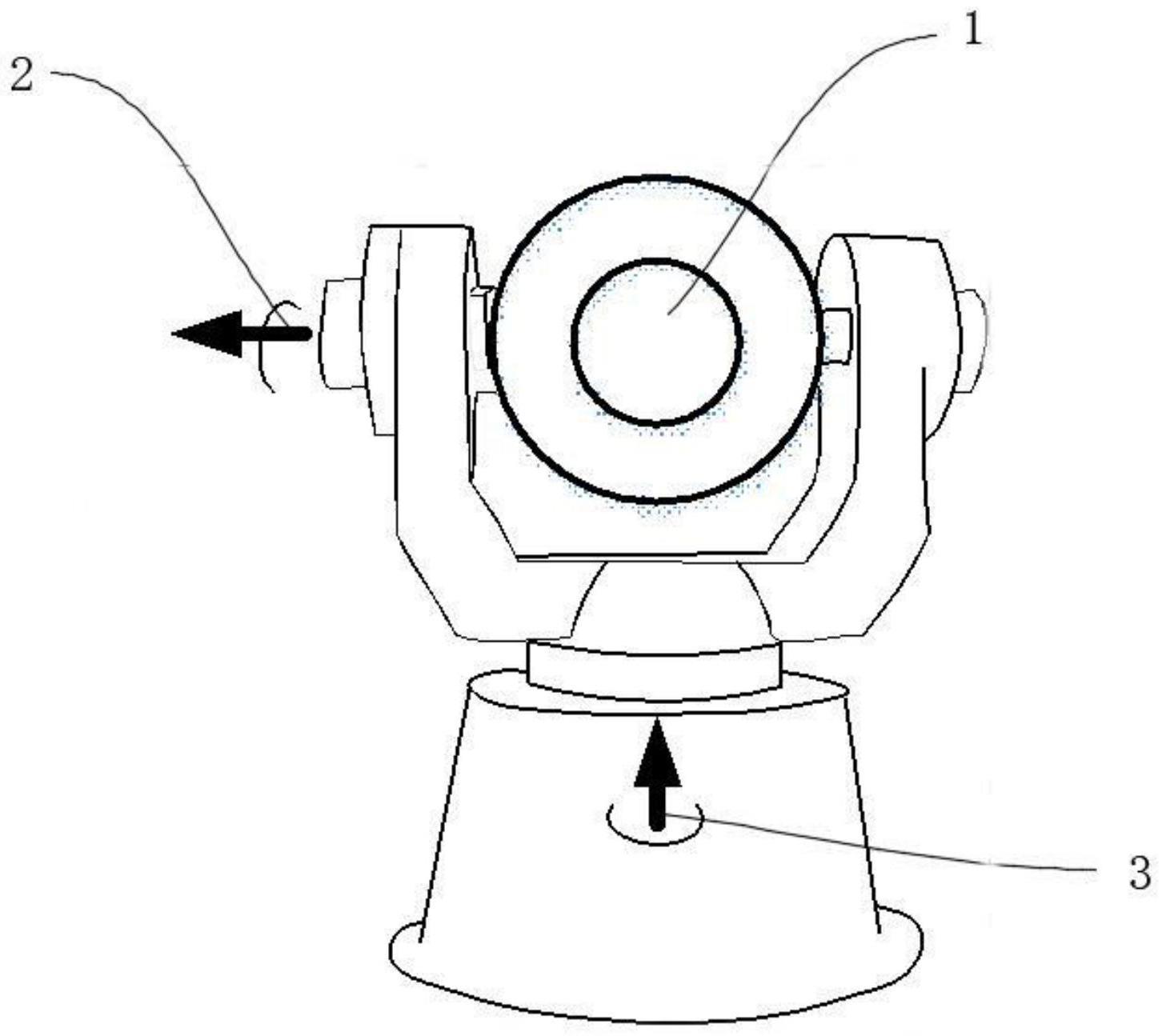
2、本发明的目的通过以下技术方案来实现:一种基于激光距离传感器的尺寸测量装置,包括激光测距仪和转台,激光测距仪安装在转台上,转台上设置有竖直转轴和水平转轴,且竖直转轴和水平转轴互相垂直,转台固定在三角支架上,激光测距仪和转台均与控制器电连接,激光测距仪与控制器通过串口连接。
3、基于激光距离传感器的尺寸测量方法,包括上述的一种基于激光距离传感器的尺寸测量装置,还包括以下步骤:
4、s1:控制器控制转台携带激光测距仪水平旋转一周,记录全部激光距离值{l}和对应转台角度{(θ,α)},遍历全部{l},求取顺序四个最小极值[l1,l2,l3,l4]以及对应的[(θ1,α1),(θ2,α2),(θ3,α3),(θ4,α4)],其中θ为水平转轴角度,α为竖直转轴角度;
5、s2:以激光测距仪为原点,以α1所处的水平方位为y轴,以垂直于α1所处的水平方位为x轴,以竖直方向为z轴,建立空间坐标系;
6、s3:转台携带激光测距仪水平运行至θ2位置,再调整竖直转轴运行至激光测距仪竖直朝上,再通过竖直转轴绕y轴逆时针旋转一周,记录全部激光距离值{l}和对应转台角度{(θ,α)};求取顺序四个最小极值[l5,l6,l7,l8]以及对应的[(θ5,α5),(θ6,α6),(θ7,α7),(θ8,α8)];
7、s4:分别计算四个墙角距离相邻墙面各d处的竖直线与屋顶和地面的交点、计算房屋中心处的竖直线与屋顶和地面的交点(xi,yi,zi),其中i=1~10,d为屋角处测量点距离墙面的水平距离,d大于1m;
8、s5:分别计算四个竖直墙面中心点坐标(xi,yi,zi),其中i=11~14;
9、s6:分别以1、2、3、4、9、13、14号交点为中心,在对应平面分别计算向外延伸1m窗口,每组获取总共9个点(xij,yij,zij),其中i=1、2、3、4、9、13、14,j=1~9;
10、s7:将所述水平转轴(3)θ2的位置为水平转动零点,定义所述水平转轴(3)绕z轴逆时针旋转相对于所述水平转轴(3)零点角度为θ,将所述竖直转轴(2)α6的位置为竖直转动零点,定义所述竖直转轴(2)绕y轴逆时针旋转相对于所述竖直转轴(2)零点角度为α,则
11、
12、s8:通过(xij,yij,zij)分别计算每个点对应的转台旋转角度(θij,αij),控制转台依次完成全部(θij,αij)位置的激光测距lij,再根据(θij,αij)和lij计算各组点的坐标(x′ij,y′ij,z′ij);
13、s9:分别利用(x′i,j,y′i,j,z′i,j)采用空间点最小二乘法拟合的方法对1、2、3、4、9、13、14号点位的局部平面方程进行拟合获得第i个点所在墙面的平面方程si,si的表达式为aix+biy+ciz+ei=0,其中i=1、2、3、4、9、13、14,ai、bi、ci、ei分别为空间拟合平面参数;
14、s10:将墙面平面方程和对应墙面点配对,配对关系为(x5,y5,z5)~s1、(x6,y6,z6)~s2、(x7,y7,z7)~s3、(x8,y8,z8)~s4、(x10,y10,z10)~s9、(x11,y11,z11)~s13、(x12,y12,z12)~s14;
15、s11:分别计算(x5,y5,z5)~s1、(x6,y6,z6)~s2、(x7,y7,z7)~s3、(x8,y8,z8)~s4、(x10,y10,z10)~s9点到平面的垂直距离,得到d1、d2、d3、d4、d5,其中d1、d2、d3、d4为房屋四个角层高,d5为房屋中心层高;
16、s12:分别计算(x11,y11,z11)~s13、(x12,y12,z12)~s14点到平面的垂直距离得到d6和d7,其中d6和d7为房屋开间尺寸;
17、s13:当参数测量完毕后,读取控制器测量结果并通过4g上传至云服务器。
18、优选的,步骤s1中,还包括以下步骤:
19、s1.1:
20、{m}=find(diff(sign(diff(l)))==2)+1;
21、其中,diff为序列中相邻点之差,sign为正负值的逻辑判断值,为正时赋值1,为负时赋值-1,find为在数组中查找等于该值的序号数组,{m}为在数组l中的极小值序号;
22、s1.2:在原始{l}中按顺序依次查询序号为{m}对应的激光距离值[l1,l2,l3,l4]以及对应的[(θ1,α1),(θ2,α2),(θ3,α3),(θ4,α4)]。
23、优选的,步骤s3中,还包括以下步骤:
24、s3.1:
25、{m}=find(diff(sign(diff(l)))==2)+1;
26、其中,diff为序列中相邻点之差,sign为正负值的逻辑判断值,为正时赋值1,为负时赋值-1,find为在数组中查找等于该值的序号数组,{m}为在数组l中的极小值序号;
27、s3.2:在原始{l}中按顺序依次查询序号为{m}对应的激光距离值[l5,l6,l7,l8]以及对应的[(θ5,α5),(θ6,α6),(θ7,α7),(θ8,α8)]。
28、优选的,步骤s4中,
29、(x1,y1,z1)=(l2-d,l1-d,-l7);
30、(x2,y2,z2)=(l2-d,-l3+d,-l7);
31、(x3,y3,z3)=(-l4+d,-l3+d,-l7);
32、(x4,y4,z4)=(-l4+d,l1-d,-l7);
33、(x5,y5,z5)=(l2-d,l1-d,l5);
34、(x6,y6,z6)=(l2-d,-l3+d,l5);
35、(x7,y7,z7)=(-l4+d,-l3+d,l5);
36、(x8,y8,z8)=(-l4+d,l1-d,l5);
37、
38、
39、优选的,步骤s5中,
40、
41、
42、
43、
44、优选的,步骤s6中,还包括以下步骤:
45、s6.1:对于屋顶面1、2、3、4、9号点,分别计算9个扩展点(xi,j,yi,j,zi,j),i=1、2、3、4、9,
46、
47、s6.2:对于竖直墙面13、14号点,分别计算9个扩展点(xi,j,yi,j,zi,j),i=13、14,
48、
49、优选的,步骤s8中,转台旋转角度(θij,αij)的计算公式为,
50、
51、
52、各组点的坐标(x′ij,y′ij,z′ij)的计算公式为,
53、
54、优选的,步骤s9中,si:aix+biy+ciz+ei=0,其中i=1、2、3、4、9,aix、biy、ciz、ei分别为空间拟合平面参数。
55、优选的,步骤s11中,d1、d2、d3、d4、d5的计算公式为:
56、
57、
58、
59、
60、
61、其中,d1,d2,d3,d4为房屋四个角层高,d5为房屋中心层高。
62、优选的,步骤s12中,d6和d7的计算公式为:
63、
64、
65、其中d6和d7为房屋开间尺寸。
66、本发明具有以下优点:本发明通过控制器控制转台和激光测距仪按步骤进行测量,参数测量完毕后,读取控制器测量结果并通过4g上传至云服务器,从而取代了人工持卷尺测量,保证了精度,同时也提高了效率。
- 还没有人留言评论。精彩留言会获得点赞!