多导航路线的生成方法、装置、电子设备以及存储介质与流程
本申请涉及自动驾驶,尤其涉及多导航路线的生成方法、装置、电子设备以及存储介质。
背景技术:
1、在自动驾驶场景中,从起点到终点的路线可能需要不止一条,因此,需要根据自动驾驶的不同需求,生成多条导航路线。
2、相关技术中,如果需要生成多条导航路线,则需要重新多次调用全局的导航算法,来得到多条导航路线。
3、但是,此种方式的计算量很大,处理器占用率较大且占用的内存较多。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本申请提供一种多导航路线的生成方法、装置、电子设备以及存储介质,能够降低计算量,减少处理器的占用率以及内存的占用空间的前提下,精确生成多条导航路线。
2、本申请第一方面提供一种多导航路线的生成方法,包括:
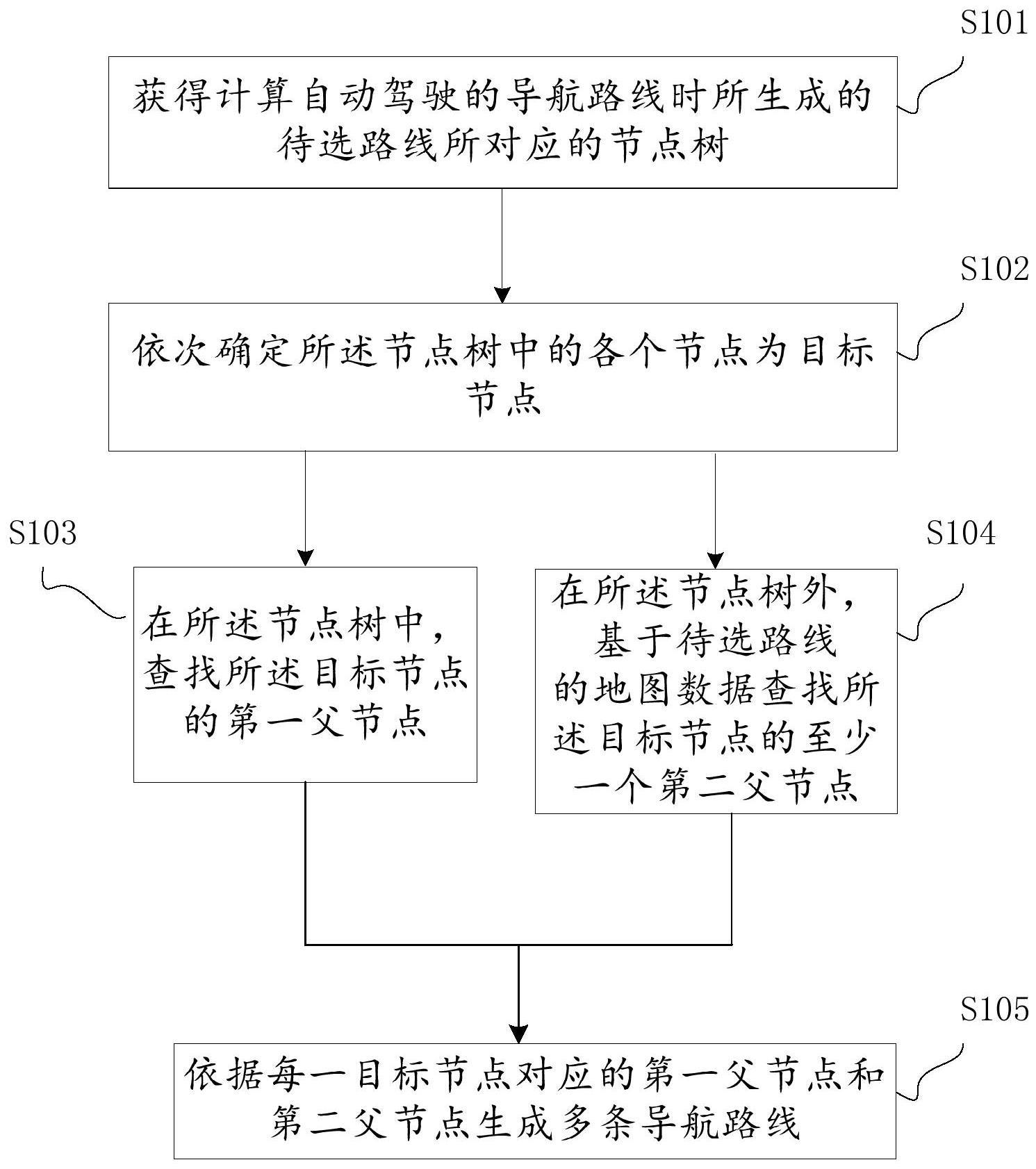
3、获得计算自动驾驶的导航路线时所生成的待选路线所对应的节点树;其中,所述待选路线中每一条道路在所述节点树中对应有一个节点;
4、依次确定所述节点树中的各个节点为目标节点;
5、在所述节点树中,查找所述目标节点的第一父节点;
6、在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点;
7、依据每一目标节点对应的第一父节点和第二父节点生成多条导航路线。
8、可选的,所述在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点,包括:
9、获取所述待选路线的地图数据;
10、确定与所述待选路线具有关联关系的道路所对应的节点为树外节点;
11、基于所述树外节点,确定所述目标节点的树外父节点;
12、将所述树外节点中能够与所述目标节点所在待选路线中除所述目标节点外的其它节点相连接的树外节点确定为所述目标节点第二父节点。
13、可选的,所述在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点,包括:
14、获取所述待选路线的地图数据;
15、确定与所述待选路线具有关联关系的道路所对应的节点为树外节点;
16、将能够与所述节点树中与所述第一父节点具有继承关系的节点相连接的树外节点确定为所述目标节点的第二父节点。
17、可选的,所述依据每一目标节点对应的第一父节点和第二父节点生成多条导航路线,包括:
18、从所述待选路线的终点对应的节点至所述待选路线的起点对应的节点,采用递归算法访问每一节点的第一父节点以及第二父节点,生成多条访问路径;
19、基于所述多条访问路径,生成从所述起点到所述终点的多条导航路线。
20、可选的,还包括:
21、调用代价函数计算每一节点的代价值;所述代价函数用于根据输入的道路相关参数计算代价值;
22、按照所述导航路线对应的代价值排序显示多条导航路线。
23、可选的,所述道路相关参数包括:车道长度、是否收费、是否高速、是否换道和/或限速值。
24、可选的,所述获得自动驾驶的待选路线所对应的节点树,包括:
25、获得自动驾驶的待选路线;
26、绘制所述待选路线对应的节点树;其中,所述待选路线中每一条道路对应所述节点树中的一个节点。
27、本申请第二方面提供一种多导航路线的生成装置,包括:
28、获取单元,用于获得计算自动驾驶的导航路线时所生成的待选路线所对应的节点树;其中,所述待选路线中每一条道路在所述节点树中对应有一个节点;
29、确定单元,用于依次确定所述节点树中的各个节点为目标节点;
30、第一查找单元,用于在所述节点树中,查找所述目标节点的第一父节点;
31、第二查找单元,用于在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点;
32、生成单元,用于依据每一目标节点对应的第一父节点和第二父节点生成多条导航路线。
33、本申请第三方面提供一种电子设备,包括:
34、处理器;以及
35、存储器,其上存储有可执行代码,当所述可执行代码被所述处理器执行时,使所述处理器执行如上所述的方法。
36、本申请第四方面提供一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如上所述的方法。
37、本申请提供的技术方案,首先获得计算自动驾驶的导航路线时所生成的待选路线所对应的节点树;其中,所述待选路线中每一条道路在所述节点树中对应有一个节点;然后依次确定所述节点树中的各个节点为目标节点;然后在所述节点树中,查找所述目标节点的第一父节点;在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点;最后依据每一目标节点对应的第一父节点和第二父节点生成多条待选路线。可以看出,在节点树的基础上能够找到除第一父节点之外的多个第二父节点,基于节点的第一父节点之外的第二父节点来生成多条导航路线,因此无需重新调用全局的导航算法,能够减少处理器的占用率以及内存的占用空间的前提下,精确生成多条导航路线。
38、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种多导航路线的生成方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点,包括:
3.根据权利要求1所述的方法,其特征在于,所述在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点,包括:
4.根据权利要求1所述的方法,其特征在于,所述依据每一目标节点对应的第一父节点和第二父节点生成多条待选路线,包括:
5.根据权利要求1所述的方法,其特征在于,还包括:
6.根据权利要求5所述的方法,其特征在于,所述道路相关参数包括:车道长度、是否收费、是否高速、是否换道和/或限速值。
7.根据权利要求1所述的方法,其特征在于,所述获得计算自动驾驶的导航路线时所生成的待选路线所对应的节点树,包括:
8.一种多导航路线的生成装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其上存储有可执行代码,当所述可执行代码被电子设备的处理器执行时,使所述处理器执行如权利要求1-7中任一项所述的方法。
技术总结
本申请涉及一种多导航路线的生成方法、装置、电子设备以及存储介质。所述方法首先获得自动驾驶的待选路线所对应的节点树;然后依次确定所述节点树中的各个节点为目标节点;然后在所述节点树中,查找所述目标节点的第一父节点;在所述节点树外,基于所述待选路线的地图数据查找所述目标节点的至少一个第二父节点;最后依据每一目标节点对应的第一父节点和第二父节点生成多条导航路线。可以看出,在节点树的基础上能够找到除第一父节点之外的多个第二父节点,基于节点的第一父节点之外的第二父节点来生成多条导航路线,因此无需重新调用全局的导航算法,能够减少处理器的占用率以及内存的占用空间的前提下,精确生成多条导航路线。
技术研发人员:李耀萍,贾郭峰,贾双成,朱磊
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!