一种动态高精度定位的环境共生隐身雷达系统的制作方法
本发明涉及雷达定位,尤其是一种动态高精度定位的环境共生隐身雷达系统。
背景技术:
1、随着现代高科技的发展,雷达大量应用于飞机、导弹、航海等领域。由于现代军事上雷达的广泛使用,使之成为一种重要的探测工具。雷达隐身自然就成为一种重要的隐身技术。现有的雷达隐身技术主要是通过改变雷达回波信号的幅度和相位降低目标的雷达散射截面,达到隐身的效果,常用的技术措施有:外形隐身技术、吸波材料技术和阻抗加载隐身技术等。然而,这些现有技术均存在隐身频段较窄的问题。现有的单阵面二维相控阵雷达的方位、俯仰覆盖范围有限,如果不装配转台很难达到0°~360°全方位覆盖,俯仰覆盖亦如此。而对单阵面二维相控阵雷达装配转台,不能充分发挥二维相控阵雷达波束捷变的优点,且转台及阵面的转动会降低雷达的隐蔽性。且在雷达监测过程中,需要实时对目标进行高精度定位以获取目标状态。
2、为实现长时间、低成本、高精度、高隐蔽的运动目标检测,本发明提出一种动态高精度定位的环境共生隐身雷达系统,能够提升雷达的隐蔽效果,同时提高雷达覆盖范围,解决了由于转台或阵面的转动导致的隐蔽性较低问题,同时通过动态定位算法对目标进行高精度定位。
技术实现思路
1、本发明的目的是通过提出一种动态高精度定位的环境共生隐身雷达系统,以解决上述背景技术中提出的缺陷。
2、本发明采用的技术方案如下:
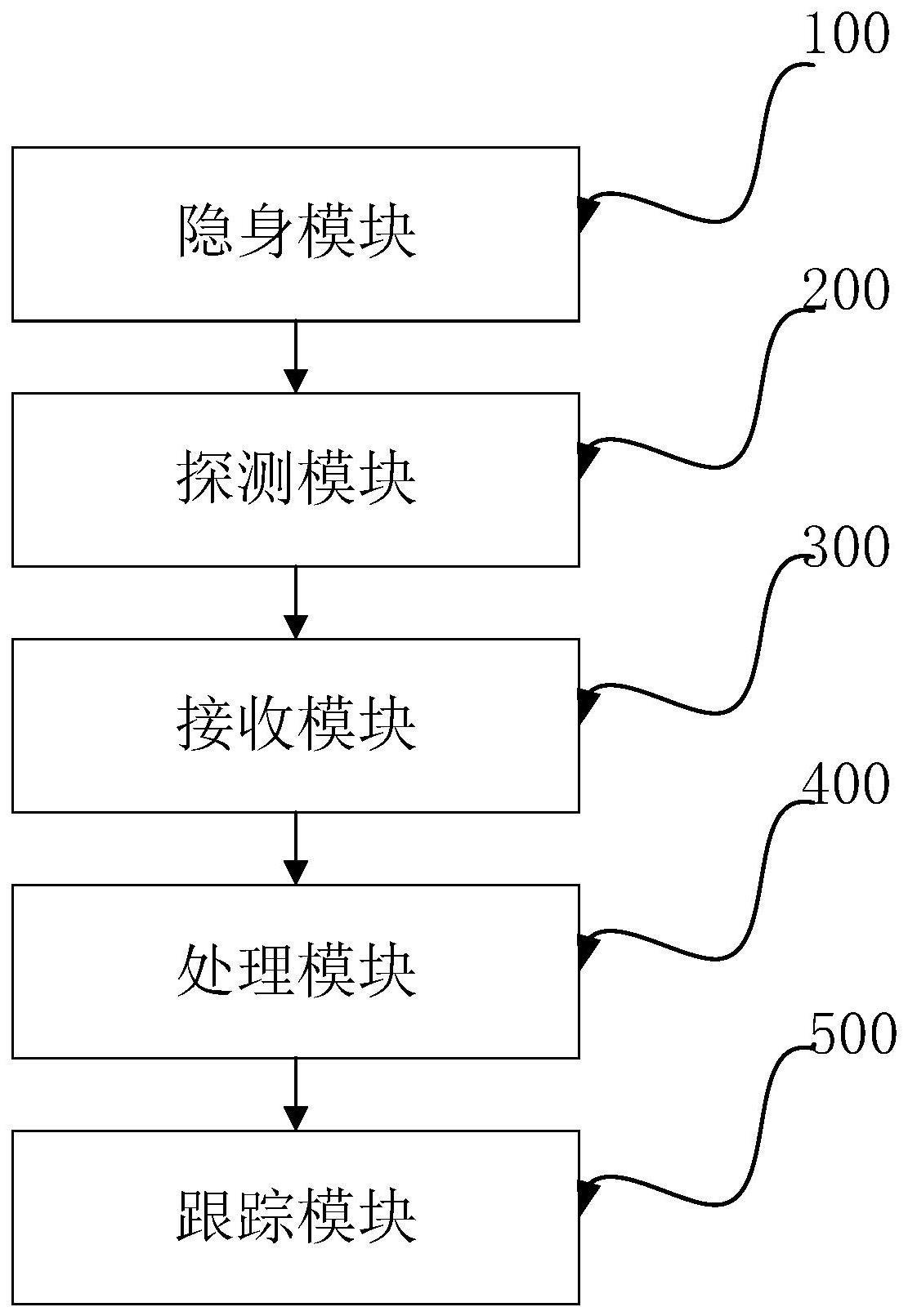
3、提供一种动态高精度定位的环境共生隐身雷达系统,包括:
4、隐身模块:用于对雷达进行隐身;
5、探测模块:用于通过发射探测信号进行探测;
6、接收模块:用于接收探测到目标后返回的探测信号;
7、处理模块:用于根据探测模块探测的数据以及接收模块接收的数据进行动态定位;
8、跟踪模块:用于对处理模块定位的目标进行跟踪。
9、作为本发明的一种优选技术方案:所述隐身模块通过对雷达外层安装新型电磁超材料负荷成型的吸波构件进行吸波处理,并在最外层涂覆吸波涂层,并选择三锯齿结构作为雷达结构棱边。
10、作为本发明的一种优选技术方案:所述探测模块和接收模块处于单阵面雷达上,所述雷达系统包括多个单阵面雷达,每个单阵面雷达间呈15°夹角。
11、作为本发明的一种优选技术方案:所述探测模块通过发射无线电信号,并通过接收模块接收目标反射的无线电信号,并记录发射过程和接收信号过程中的雷达数据。
12、作为本发明的一种优选技术方案:所述雷达数据包括探测模块发射无线电信号时雷达的坐标位置和发射时间,以及接收模块接收无线电信号时雷达的坐标位置和接收时间。
13、作为本发明的一种优选技术方案:所述雷达的坐标位置数据中,雷达位置为经纬度位置数据,通过坐标转换对雷达的坐标位置进行转换。
14、作为本发明的一种优选技术方案:所述处理模块根据探测模块与接收模块记录的数据通过动态定位算法对目标进行定位。
15、作为本发明的一种优选技术方案:所述动态定位算法如下:设目标坐标为设在第j个单阵面雷达的第k次探测中,探测模块向目标发射信号时位置为探测信号探测到目标后立即反射,此时雷达至目标的距离为雷达接收到目标返回的信号时位置为此时目标与雷达间的距离为则观测方程为:
16、
17、
18、
19、其中,和分别为雷达在发射和接收信号时与目标的距离,为测距误差,εjk为其他噪声引起的测距误差;
20、所述雷达发射的探测信号的平均速度为cjk:
21、
22、其中,c为光速,∈为介电常数,f为无线电信号的发射频率;
23、根据泰勒级数公式在处展开,化为:
24、
25、其中,和分别代表雷达发射和接收信号时至目标的欧式距离,和分别表示在处展开的雷达在发射和接收信号时与目标的欧式距离,且:
26、
27、其中,和分别为雷达至目标和目标值雷达的单程传播时间,和为雅各比矩阵,系数为:
28、
29、
30、其中,表示雷达发射信号或接收信号时的位置;其中,为目标的初始坐标值,表示雷达的坐标位置,当i=1时表示发射探测信号时雷达的坐标位置,当i=2时,表示雷达接收信号时的坐标位置,根据上式得到距离的残差通过最小二乘δtδ=min计算获得目标的位置。
31、作为本发明的一种优选技术方案:所述处理模块通过动态定位算法对目标再次进行定位,并记录两次定位间隔时间,计算目标运动速度。
32、作为本发明的一种优选技术方案:所述跟踪模块根据所述处理模块定位的目标数据通过oselm算法对目标位置进行预测和追踪。
33、本发明提供的动态高精度定位的环境共生隐身雷达系统,与现有技术相比,其有益效果有:
34、本发明通过吸波构件和三锯齿结构提升雷达的隐蔽效果,通过多个单阵面雷达提高雷达覆盖范围,解决了由于转台或阵面的转动导致的隐蔽性较低问题,同时通过动态定位算法实现对目标的高精度定位,提升目标的定位效果。
技术特征:
1.一种动态高精度定位的环境共生隐身雷达系统,其特征在于:包括:
2.根据权利要求1所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述隐身模块(100)通过对雷达外层安装新型电磁超材料负荷成型的吸波构件进行吸波处理,并在最外层涂覆吸波涂层,并选择三锯齿结构作为雷达结构棱边。
3.根据权利要求1所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述探测模块(200)和接收模块(300)处于单阵面雷达上,所述雷达系统包括多个单阵面雷达,每个单阵面雷达间呈15°夹角。
4.根据权利要求3所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述探测模块(200)通过发射无线电信号,并通过接收模块(300)接收目标反射的无线电信号,并记录发射过程和接收信号过程中的雷达数据。
5.根据权利要求4所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述雷达数据包括探测模块(200)发射无线电信号时雷达的坐标位置和发射时间,以及接收模块(300)接收无线电信号时雷达的坐标位置和接收时间。
6.根据权利要求5所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述雷达的坐标位置数据中,雷达位置为经纬度位置数据,通过坐标转换对雷达的坐标位置进行转换。
7.根据权利要求6所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述处理模块(400)根据探测模块(200)与接收模块(300)记录的数据通过动态定位算法对目标进行定位。
8.根据权利要求7所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述动态定位算法如下:设目标坐标为设在第j个单阵面雷达的第k次探测中,探测模块(200)向目标发射信号时位置为探测信号探测到目标后立即反射,此时雷达至目标的距离为雷达接收到目标返回的信号时位置为此时目标与雷达间的距离为则观测方程为:
9.根据权利要求8所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述处理模块(400)通过动态定位算法对目标再次进行定位,并记录两次定位间隔时间,计算目标运动速度。
10.根据权利要求9所述的动态高精度定位的环境共生隐身雷达系统,其特征在于:所述跟踪模块(500)根据所述处理模块(400)定位的目标数据通过oselm算法对目标位置进行预测和追踪。
技术总结
本发明涉及雷达定位技术领域,尤其为一种动态高精度定位的环境共生隐身雷达系统,包括:隐身模块:用于对雷达进行隐身;探测模块:用于通过发射探测信号进行探测;接收模块:用于接收探测到目标后返回的探测信号;处理模块:用于根据探测模块探测的数据以及接收模块接收的数据进行动态定位;跟踪模块:用于对处理模块定位的目标进行跟踪。本发明通过吸波构件和三锯齿结构提升雷达的隐蔽效果,通过多个单阵面雷达提高雷达覆盖范围,解决了由于转台或阵面的转动导致的隐蔽性较低问题,同时通过动态定位算法实现对目标的高精度定位,提升目标的定位效果。
技术研发人员:李春波,李成,曹龙胜,郝加刚,赵光顺
受保护的技术使用者:烟台欣飞智能系统有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!