基于游标组合的多圈磁编码器位置解算方法及系统与流程
本发明属于编码器,具体涉及基于游标组合的多圈磁编码器位置解算方法及系统。
背景技术:
1、在旋转运动控制系统中,轴角和位置检测传感器(编码器)是实现运动控制以及位移测量的关键元件,尽管增量式编码器或者单圈的绝对值编码器可以胜任很多地方,都能够完成长距离位置测量任务,但在选用不同类型编码器时,设备应用体验却大不相同。
2、使用增量型编码器或者单圈绝对值编码器,可以实现多圈位置检测和记录功能,但却需要额外的计数模块或者断电记忆模块,来保证多圈数据在意外状况下如:控制程序运行异常、系统与编码器之间电气连接的断开、设备故障或断电停机时不会发生丢失。此时,如果能够使用具有机械记忆的多圈绝对值编码器,则可更大概率的避免因设备系统电气原因如断电、信号开路等造成的位置测量进程的中断或者延时,提高生产效率。因此,具有多圈检测范围的多圈编码器得到了国内外的关注和研究。
3、目前多圈编码器根据其应用原理可以分为电子式多圈编码器和机械式多圈编码器两大类,机械式多圈编码器通常也称为齿轮式多圈编码器,其各自特点如下:
4、1.电子式多圈编码器是利用额外的圈数计数传感器与电源系统相构成,其体积小且具有较大的检测量程,理论上只要电源系统不断电,其可以计数到解码ic可用的最大内存,但是这也导致其对供电稳定性非常敏感,一旦系统掉电,则计数数据则会全部丢失。
5、此外,这种编码器一般不具有机械记忆及掉电位置识别功能,电系统掉电重启,更恶劣情况下比如在掉电情况下位置变动时,无法记忆或者重新获知新的多圈绝对位置。
6、2.齿轮式多圈编码器则是一种齿轮结构和光电码盘或者磁感知系统相结合的具有机械记忆及机械识别的编码器。当轴旋转时,各个齿轮上的光电码盘或者磁感知系统也会随之旋转,位于其上方的传感器则会获取这些变化的信息,并在解码ic中将这些信息进行数据处理,最后转换为多圈位置信息。
7、此类编码器具有机械记忆的特点,即使系统掉电,只需要重新上电即可获取目前电机转轴的绝对多圈位置信息,不会发生位置信息的丢失;甚至在掉电情况下位置有移动,在电系统恢复时可重新识别当前圈数和角度绝对位置值。
8、但目前的齿轮式多圈编码器也存在一些限制,如常规结构检测范围较小,检测范围扩大时会导致结构复杂、体积较大、位置解算方法复杂等问题。
9、因此,在常规磁游标算法基础上,本发明提出了一种多层级构架的磁游标组编码和解码方法,并研究了其组合和参数选取流程。采用这种多层级构架的磁游标组编码和解码方法,即可以用多轴构造实现多圈编码检测范围的拓展,又可以保留公式解算的高效率优势,且在设计阶段较容易进行针对性的参数选择。
技术实现思路
1、本发明是为了克服现有技术中,目前的齿轮式多圈编码器存在常规结构检测范围较小,检测范围扩大时会导致结构复杂、体积较大、位置解算方法复杂的问题,提供了一种在检测范围拓展方面具有更好的普适性与简便性,同时在解算能力方面保留了公式解算的高精度、高效率的优势,可以有效降低解码ic的硬件成本,具有高可靠性的基于游标组合的多圈磁编码器位置解算方法及系统。
2、为了达到上述发明目的,本发明采用以下技术方案:
3、基于游标组合的多圈磁编码器位置解算方法,包括以下步骤:
4、s1,构建多层级磁游标组结构;
5、s2,基于最小重合齿数,对多层级磁游标组结构进行升级组合;
6、s3,根据齿轮齿数配比方法,决定多层级磁游标组结构的参数;
7、s4,构建省齿轮的二级磁游组结构。
8、作为优选,步骤s1包括如下步骤:
9、s11,已知磁游标算法的解算周期角与磁编码器的输出信号θsigm和θsiga具有相同的变化规律,均随着检测轴的旋转,且检测角度从0°变化至360°,则设定存在另一组游标,即副级游标,且所述副级游标的解算周期角与初始的一级游标的解算周期角均满足游标算法的条件,用于构造成游标组;
10、s12,根据游标组,扩大检测轴的检测范围,并根据游标解算法得到如下结果:
11、
12、
13、
14、其中,为二级磁游标的解算周期角;θd2为差值角,tmax为二级磁游标的最大多圈检测范围;z2m1m,z2m1v,z2v1m,z2v1v为两组一级游标中各自的齿轮齿数,circlem为二级磁游标结构下的检测轴旋转圈数,n为大于1的自然数。
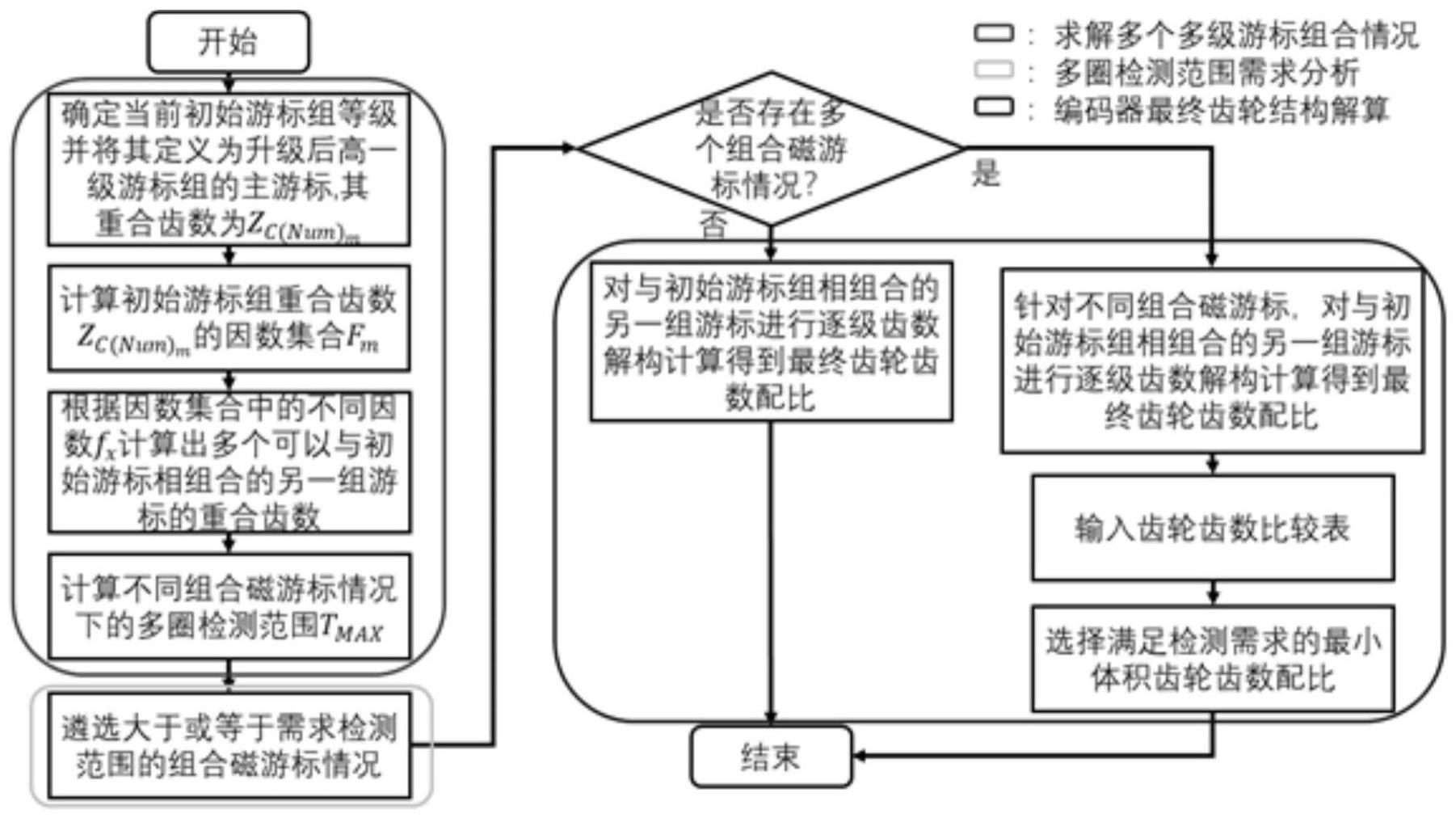
15、作为优选,步骤s2包括如下步骤:
16、s21,根据构成当前级别游标组的各个齿轮的齿数,通过求出游标组的重合齿数
17、s22,根据拟构建的高一级游标组的重合齿数zc(num),以及已有的一个低一级游标组的重合齿数推算所需的另外一个低一级的磁游标组的重合齿数
18、s23,根据可能的多种重合齿数组合,对整个系统的齿轮数和齿数匹配,进行分析和取舍,构建多级磁游标系统。
19、作为优选,步骤s22包括如下步骤:
20、s221,以二级磁游标为例,若使两个低一级别的游标组输出的解算周期角信号之间的关系,满足高一级磁游标算法,则在已知当前一级游标组的重合齿数为情况下,与所述一级游标组相组合的另外一个一级游标组的重合齿数满足:
21、
22、其中,为两个游标组重合齿数的最大公约数;fm与fn分别为与的中的一个因数;
23、当fn=fm-1时,公式(5)成立,得到:
24、
25、s222,由于对于已知游标组的重合齿数存在除了1以外的多个因数,说明拟选配的作为二级磁游标的低一级的磁游标组的参数存在多个不同的选择,所以定义集合:
26、
27、则得到:
28、
29、其中,fm代表已知的低一级游标组重合齿数除1以外的所有因数集合;fx则为所述集合中的一个因数。
30、作为优选,步骤s3包括如下步骤:
31、s31,计算被推导的x层级副游标组的重合齿数的所有因数集合并判断输入的因数集合是否存在满足|fv1-fv2|=1条件的因数对,若是则进行下一步骤;
32、s32,构建多个存在因数对,根据不同因数对(fv1,fv2),进行解构计算,求出低一级的主游标组重合齿数和副游标组重合齿数
33、s33,求出主游标组重合齿数的所有因数集合求出副游标组重合齿数的所有因数集合
34、作为优选,步骤s4包括如下步骤:
35、s41,当具有连续齿数的三个齿轮组成二级磁游标时,具体如下:
36、若三个齿轮的齿数包含两个偶数,即所述三个齿轮的齿数za、zb、zc分别表示为
37、
38、其中k∈n自然数集合,则三个齿轮组成的两个一级磁游标组的重合齿数zab和zbc为:
39、zab=za*zb (10)
40、zbc=zb*zc (11)
41、得出两个一级磁游标组的重合齿数比为:
42、
43、以所述两个一级磁游标构建高一级的二级磁游标,且若以齿数为za的齿轮作为检测轴,则二级磁游标的最大多圈检测范围为:
44、
45、作为优选,步骤s41中,当三个齿轮齿数包含两个奇数时,则有
46、
47、且得出
48、
49、此时,所述两个一级磁游标组的重合齿数比构成的因数对不是由连续自然数构成,不能组合成高一级别的磁游标组。
50、本发明还提供了基于游标组合的多圈磁编码器位置解算系统包括:
51、多层级磁游标组构建模块,用于构建多层级磁游标组结构;
52、升级组合模块,用于基于最小重合齿数,对多层级磁游标组结构进行升级组合;
53、参数决定模块,用于根据齿轮齿数配比方法,决定多层级磁游标组结构的参数;
54、特殊二级磁游组结构构建模块,用于构建省齿轮的二级磁游组结构。
55、本发明与现有技术相比,有益效果是:(1)采用本发明方法实现差齿结构的多圈磁编码器位置检测时,可以磁编码器的输出信号,通过多层级游标公式直接计算,无需将信号值转换为齿数或进行建表查询;(2)本发明可通过齿轮结构的多轴拓展,实现多圈编码器检测范围的拓展;(3)利用本发明分析的方法,在设计阶段较容易进行针对性的多层级磁游标组结构参数选择;(4)本发明在检测范围拓展方面具有更好的普适性与简便性,同时在解算能力方面保留了公式解算的高精度、高效率的优势,可以有效降低解码ic的硬件成本,具有高可靠性。
- 还没有人留言评论。精彩留言会获得点赞!