一种微型飞行器低速风洞测试装置与系统
本发明公开一种微型飞行器低速风洞测试装置与系统,涉及飞行器风洞测试。
背景技术:
1、风洞为利用动力驱动装置产生可控制气流和飞行器运动的相对性以及相似性原理进行气流实验的装置。风洞天平可分为接触式测量天平与非接触式天平,磁悬挂技术属于非接触式天平。
2、应用风洞测试微型飞行器需要使用低速风洞,微型飞行器体积小,质量轻,因此工作雷诺数受尺度效应影响非常大,当直径小于1mm、终端速度约为0.3m/s时,工作雷诺数小于4;当直径大于40mm时,终端速度约1.2m/s时,工作雷诺数大于3000。现有技术中仅有专利cn 113029496 a提供了一种低湍流度极低速气流的微型垂直风洞试验装置,其目的在于使装置适用于微型飞行器的测试条件,装置通过风洞结构和风洞方向的设计提高流场品质。
3、结合前述内容可知,现有技术中对于适用于微型飞行器的低流速风洞测试装置相关研究尚不成熟,并且已有的低流速风洞测试未考虑到如何提高微型飞行器风洞测试的精度。
4、本
技术实现要素:
5、本发明目的在于,提供一种微型飞行器低速风洞测试装置与系统,解决现有技术中无法针对微型飞行器进行高精度的低速风洞测试。
6、为实现上述技术目的,达到上述技术效果,发明是通过以下技术方案实现:
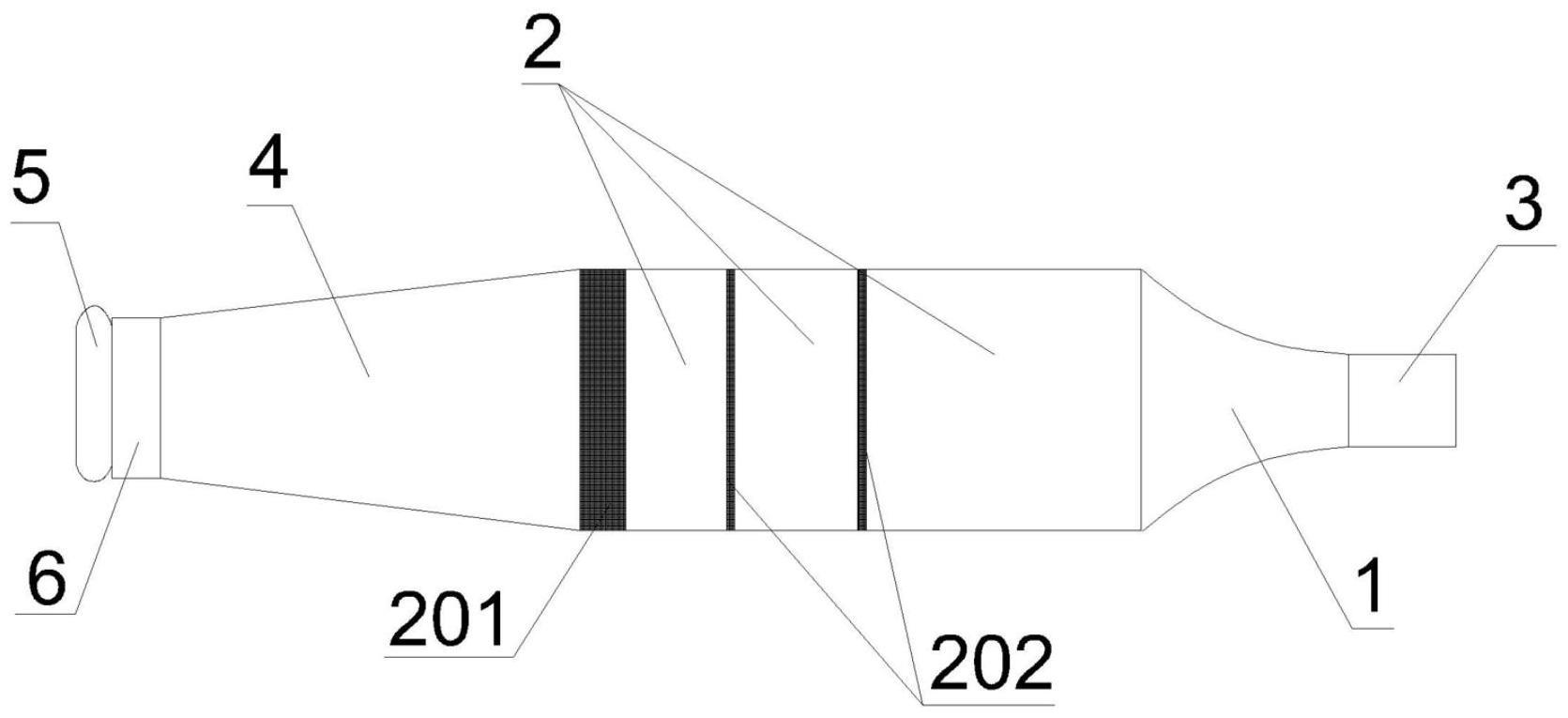
7、一种微型飞行器低速风洞测试装置与系统,包括:依次连接的平流风机、进气段、扩散段、稳定段、收缩段、试验段,所述稳定段为长宽高分别为80、40、30cm的矩形管道,所述收缩段与稳定段壁面厚度均为3mm,所述收缩段的接口与所述稳定段匹配连接,所述收缩段长度为20cm,所述收缩段以所述接口为起点以维氏曲线结构缩进,所述收缩段另一端缩进为15x20cm的矩形口连接所述实验段,所述扩散段连接所述进气段的一端逐渐由圆形筒状结构转化至矩形柱状结构,所述平流风机为无叶结构。
8、进一步的,所述稳定段还包括整流件,所述整流件包括9.68cm厚度的蜂窝网、距离所述蜂窝网分别为5cm、18cm的整流网,所述蜂窝网、整流网均封闭所述整流件。
9、进一步的,所述扩散段圆筒起端开口为直径30cm的圆口,总体长度为60cm。
10、本发明的另一目的在于,提供一种微型飞行器低速风洞测试装置的控制系统,包括调节模块、姿态测试模块、智能模块,所述调节模块调节风洞中对模拟飞行器施加各类控制力,所述调节模块根据所述姿态测试模块获得的姿态信息对所述控制力的各类参数与方向,所述智能模块依据所述姿态测试模块获取的历史信息内容进行对应情况的所述控制力调节参数预测。
11、进一步的,所述调节模块包括x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块、俯仰角控制模块,所述x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块、俯仰角控制模块分别对应控制模拟飞行器的x、y、z轴位置与滚动角、俯仰角角度。
12、进一步的,所述姿态测试模块包括光信号捕捉器、信号转化器,所述光信号捕捉器实时捕捉模拟飞行器姿态后通过所述信号转化器传输至所述调节模块。
13、进一步的,所述调节模块只包括x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块。
14、进一步的,所述智能模块为内置有机器学习功能的模块,所述智能模块记录每次所述姿态测试模块获得的姿态情况与对应的所述调节模块的参数调节结果,所述智能模块内的机器学习功能学习所述姿态情况与参数调节结果之间的规律,所述智能模块依据所述规律对下一时刻姿态情况对应参数进行预测后对所述调节模块直接输出对应预测结果的指令。
15、进一步的,所述机器学习功能根据记录数据通过决策树判定所述预测结果,所述机器学习功能获取所述姿态测试模块获取的姿态信息以及所述调节模块对应的每次调节参数的先验数据,所述机器学习功能根据先验数据对所述调节模块的各项调节参数值进行预估。
16、进一步的,所述决策树针对记录中的不同参数进行决策树判定,具体步骤为:
17、步骤1、根据记录数据将所述参数调节对应的结果归类为正确、错误两类,
18、当参数调节完毕后模拟飞行器姿态回归正常,所述参数调节对应的结果即归类为正确,否则归类为错误。
19、步骤2、根据归类结果对各项参数进行基尼系数结果计算,
20、根据不同调节参数情况,将每类参数划分为若干独立基尼结果,具体算式表达为,
21、gini(a1)=1-p(y)2-p(n)2;
22、其中所述gini(a1)为对应基尼系数结果,a1为独立参数,y为对应的调节参数实施后结果为正确的概率,n为对应的调节参数实施后结果为错误的概率,p为概率;
23、完成上述内容后,将同类参数中所有基尼系数结果根据占比进行加权求和,具体算式表达为,
24、gini(a)=pgini(a1)+…+pgini(an)n=(1,2,…,n);
25、其中,a为一类参数的最终基尼系数结果,n为同类参数对应的独立参数总数;
26、步骤3、以所述最终基尼系数结果最小值为节点逐步获取所述预测结果,
27、在获取前一节点后,去除已被作为节点的一类参数后重新进行步骤1-2,直至判断结束所有种类参数,最后获得所述预测结果。
28、有益效果:
29、本发明根据理论计算结果限制所述稳定段、收缩段、实验段、扩散段的各项尺寸并在前述装置基础上应用无叶风扇产生气流,结合特定的尺寸结构与无叶风扇产生的均匀气流。经过实验证明本发明中的低流速风洞具备良好的流场高品质,适用于微型飞行器的风洞测试系统。
30、另一方面,结合前述风洞结构特征,本发明通过在自动测量步骤中添加机器学习预测飞行器姿态变化,使风洞可以提高对各项控制力的参数调节灵敏度,从而提高装置的测试精度。实际上在前述结构形成的低速风洞环境中变化是微小且迅速的,因此通过机器学习预估控制情况尤为重要。
31、与现有技术相比,本发明结合特殊的风洞结构以及高灵敏度的调试功能实现了针对微型飞行器的高精度风洞测试。
32、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术实现思路
技术特征:
1.一种微型飞行器低速风洞测试装置,其特征在于:依次连接的平流风机、进气段、扩散段、稳定段、收缩段、试验段,所述稳定段为长宽高分别为80、40、30cm的矩形管道,所述收缩段与稳定段壁面厚度均为3mm,所述收缩段的接口与所述稳定段匹配连接,所述收缩段长度为20cm,所述收缩段以所述接口为起点以维氏曲线结构缩进,所述收缩段另一端缩进为15x20cm的矩形口连接所述实验段,所述扩散段连接所述进气段的一端逐渐由圆形筒状结构转化至矩形柱状结构,所述平流风机为无叶结构。
2.根据权利要求1所述的一种微型飞行器低速风洞测试装置,其特征在于:所述稳定段还包括整流件,所述整流件包括9.68cm厚度的蜂窝网、距离所述蜂窝网分别为5cm、18cm的整流网,所述蜂窝网、整流网均封闭所述整流件。
3.根据权利要求1所述的一种微型飞行器低速风洞测试装置,其特征在于:所述扩散段圆筒起端开口为直径30cm的圆口,总体长度为60cm。
4.根据权利要求1-3任意一项所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:包括调节模块、姿态测试模块、智能模块,所述调节模块调节风洞中对模拟飞行器施加各类控制力,所述调节模块根据所述姿态测试模块获得的姿态信息对所述控制力的各类参数与方向,所述智能模块依据所述姿态测试模块获取的历史信息内容进行对应情况的所述控制力调节参数预测。
5.根据权利要求4所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:所述调节模块包括x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块、偏航角控制模块,所述x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块、偏航角控制模块分别对应控制模拟飞行器的x、y、z轴位置与滚动角、偏航角角度。
6.根据权利要求4所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:所述姿态测试模块包括光信号捕捉器、信号转化器,所述光信号捕捉器实时捕捉模拟飞行器姿态后通过所述信号转化器传输至所述调节模块。
7.根据权利要求6所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:所述调节模块只包括x轴调节模块、y轴调节模块、z轴调节模块、滚动角调节模块。
8.根据权利要求4所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:所述智能模块为内置有机器学习功能的模块,所述智能模块记录每次所述姿态测试模块获得的姿态情况与对应的所述调节模块的参数调节结果,所述智能模块内的机器学习功能学习所述姿态情况与参数调节结果之间的规律,所述智能模块依据所述规律对下一时刻姿态情况对应参数进行预测后对所述调节模块直接输出对应预测结果的指令。
9.根据权利要求8所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于:所述机器学习功能根据记录数据通过决策树判定所述预测结果,所述机器学习功能获取所述姿态测试模块获取的姿态信息以及所述调节模块对应的每次调节参数的先验数据,所述机器学习功能根据先验数据对所述调节模块的各项调节参数值进行预估。
10.根据权利要求9所述的一种微型飞行器低速风洞测试装置的控制系统,其特征在于,所述决策树针对记录中的不同参数进行决策树判定,具体步骤为:
技术总结
本发明公开的一种微型飞行器低速风洞测试装置,依次连接的平流风机、进气段、扩散段、稳定段、收缩段、试验段。一种微型飞行器低速风洞测试装置的控制系统,包括调节模块、姿态测试模块、智能模块,所述调节模块调节风洞中对模拟飞行器施加各类控制力,所述调节模块根据所述姿态测试模块获得的姿态信息对所述控制力的各类参数与方向,所述智能模块依据所述姿态测试模块获取的历史信息内容进行对应情况的所述控制力调节参数预测。本发明通过在自动测量步骤中添加机器学习预测飞行器姿态变化,使风洞可以提高对各项控制力的调节灵敏度,从而提高装置的测试精度。本发明结合特殊的风洞结构以及高灵敏度的调试功能实现了针对微型飞行器的高精度风洞测试。
技术研发人员:蒋诗颖,张晓薇,胡晨予,蒋禹轩,黄太帅,邓邦林,刘双,田荣刚,何九宁,张传瑜,史顺平,刘雪峰,王素,杨睿,薛又文
受保护的技术使用者:成都理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!