一种抗干扰的目标检测方法及系统与流程
本发明涉及雷达检测的,尤其涉及一种抗干扰的目标检测方法及系统。
背景技术:
1、在人体感应领域,传统方案采用红外或者声音探测,若检测到红外特征和/或声音信号,则认为附近有人类活动。近年来,采用电磁波雷达进行人体感应的方案日益增多,其原理为检测人体运动导致的电磁波的反射信号,若信号强度变化超过了给定的阈值,则认为附近有人类活动。
2、进一步地,一些电磁波雷达方案采用了调频连续波(fmcw)体制的雷达,由于调频连续波雷达可以同时进行距离和多普勒探测,使得雷达具备了感知特定距离范围内的人类活动的能力。fmcw体制的雷达可将不同距离的反射回波映射到不同的频率,接收机通过接收反射回波,并进行傅里叶变换,每个傅里叶变换后的计算结果单元(rangebin)体现了给定距离内的雷达信号回波能量。通过分析回波能量的变化幅度(mti/mtd),若变化幅度大于给定阈值,则认为在给定距离内有人类活动;统计变化幅度的方法种类较多,如延迟线对消及其各类变体,滤波器组,傅里叶变换统计等等。
3、但是,在现实工作中,回波能量的变化可能由于干扰导致,干扰的来源可能是同频或者邻频的雷达,同频或邻频的通信设备,电网电源/设备产生的高次谐波/高频分量等等。此种干扰,往往导致误报。为了抑制误报,业内也有若干广泛采用的抗干扰检测,消除技术,在发射波形层面,可采用频率随机化、相位随机化、时间随机化等波形随机化技术减少干扰冲突的概率/抑制峰值干扰,在接收机层面,往往通过检测时域信号逐个样本的信号差异大于给定阈值,则认为存在干扰。
4、在现有技术中,通过以下步骤降低干扰信号的影响:雷达接收回波信号后通过模拟-数字转换器采样成为数字信号;定义幅度阈值对干扰信号进行检测;当检测到被干扰点后,对干扰信号进行抑制;对于调频连续波雷达,将完成干扰信号抑制的信号作为输入,进行傅里叶变换;将完成傅里叶变换后的信号送入mtd/mti检测器进行给定距离内是否有人类活动的检测;输出目标活动。
5、但是以上现有技术,依然存在以下三点不足之处:
6、(1) 干扰信号抑制可以在一定程度上抑制干扰,但是并不能可靠的还原信号;这导致“干扰抑制”后的信号特征同实际信号特征往往存在区别,一旦将该类信号送入动目标指示/检测器,容易造成误报;为了抑制误报,动目标检测器的检测门限不得不进行相应的保守设计,这导致检测灵敏度降低。
7、(2) 对于干扰信号检测的幅度阈值的选择依赖数据统计和经验;通常来说,若阈值较低,则抗干扰能力较强,但较低的阈值可能导致将正常的运动误判为干扰,造成漏报;为避免漏报的存在,往往只能设计较大的阈值。
8、对于信号强度低于阈值的输入信号无法有效进行干扰检测和抑制。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种抗干扰的目标检测方法及系统,根据干扰统计结果动态调整干扰信号检测的阈值,较好的平衡了雷达的误报和漏报特征。
2、本发明的上述发明目的是通过以下技术方案得以实现的:
3、一种抗干扰的目标检测方法,包括以下步骤:
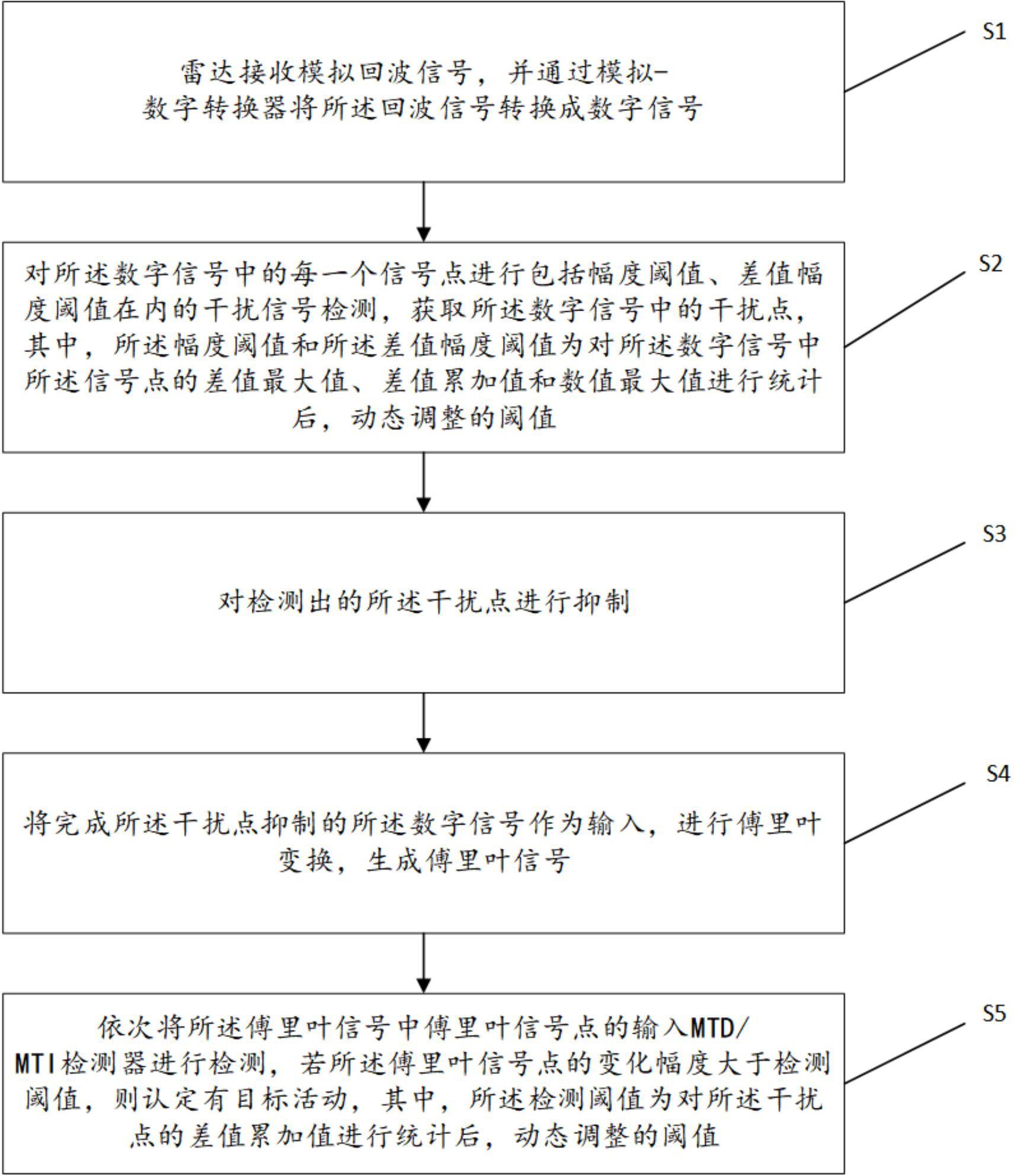
4、s1:雷达接收模拟回波信号,并通过模拟-数字转换器将所述回波信号转换成数字信号;
5、s2:对所述数字信号中的每一个信号点进行包括幅度阈值、差值幅度阈值在内的干扰信号检测,获取所述数字信号中的干扰点,其中,所述幅度阈值和所述差值幅度阈值为对所述数字信号中所述信号点的差值最大值、差值累加值和数值最大值进行统计后,动态调整的阈值;
6、s3:对检测出的所述干扰点进行抑制;
7、s4:将完成所述干扰点抑制的所述数字信号作为输入,进行傅里叶变换,生成傅里叶信号;
8、s5:依次将所述傅里叶信号中傅里叶信号点的输入mtd/mti检测器进行检测,若所述傅里叶信号点的变化幅度大于检测阈值,则认定有目标活动,其中,所述检测阈值为对所述干扰点的差值累加值进行统计后,动态调整的阈值。
9、进一步地,在步骤 s2中,对所述数字信号中的每一个所述信号点进行包括所述幅度阈值、所述差值幅度阈值在内的干扰信号检测,具体为:
10、定义所述数字信号的所述信号点的信号序列为a[i],i为所述信号点的序列号,从0开始的正整数,定义所述幅度阈值为thresholda ,所述差值幅度阈值包括第一差值幅度阈值thresholddiff,b、第二差值幅度阈值thresholddiff,c和第三差值幅度阈值thresholddiff,d;
11、定义判断依据a: abs(a[n]) > thresholda;
12、定义判断依据b:abs(a[n+1]-a[n]) > thresholddiff,b;
13、定义判断依据c:abs(a[n]-a[n-1]) > thresholddiff,c;
14、定义判断依据d: abs(a[n]-a[n-1])+ abs(a[n+1]-a[n])> thresholddiff,d;
15、当所述信号点n满足判断依据a-d中的一个或若干个时,认定所述信号点n为所述干扰点。
16、进一步地,在步骤s2中,还包括:
17、当所述信号点n和所述信号点m均为所述干扰点,且m>n,则认定所述信号点n到所述信号点m之间整段信号中的所述信号点均为所述干扰点。
18、进一步地,对所述数字信号中所述信号点的差值最大值、差值累加值和数值最大值,以及所述干扰点的差值累加值进行统计,具体为:
19、记x0[i]= abs(a[i]-a[i-1]);
20、所述信号点的差值最大值为diffmax = max(x0[i]);
21、所述信号点的差值累加值为adiff = sum(x0[i]);
22、记x1[i] = abs(a[i]);
23、所述信号点的数值最大值为absmax = max(x1[i]);
24、记识别到的所述干扰点为k[s],s为所述干扰点的序列号,从0开始的正整数,记x2[t]= abs(a[t]-a[t-1]),x3[t]= abs(a[t+1]-a[t]) ,其中,所述信号点t属于k[s];
25、所述干扰点的差值累加值为intfsum =sum(x2[t])+sum(x3[t]);
26、定义变量bintf = true/false代表在步骤s2中是否检测到所述干扰点;
27、定义变量bmov = true/false代表在步骤s5中是否认定有目标活动。
28、进一步地,在步骤s2中,还包括:对所述幅度阈值进行动态调整,具体为:
29、所述幅度阈值thresholda 的计算过程采用以下任意一种形式:
30、若bintf为true,沿用thresholda ;若bintf为false,且bmov为false,则thresholda = p*absmax + q*adiff;若bintf为false,且bmov为true,则thresholda = pm*absmax + qm*adiff;
31、或
32、若bintf为true,沿用thresholda ;若bintf为false,且bmov为false,则thresholda = p*tabsmax + q*tadiff;若bintf为false,且bmov为true,则thresholda = pm*tabsmax + qm*tadiff;
33、其中,p,q,pm,qm为在统计对目标活动的误报或漏报率之后获取的数值,tabsmax =αtabsmax +(1-α)absmax,tadiff =αtadiff +(1-α)adiff,α为在统计对目标活动的误报或漏报率之后获取的滤波器系数,tabsmax初始为absmax,tadiff初始值为adiff。
34、进一步地,在步骤s2中,还包括:对所述差值幅度阈值进行动态调整,具体为:
35、所述第一差值幅度阈值thresholddiff,b、所述第二差值幅度阈值thresholddiff,c和所述第三差值幅度阈值thresholddiff,d的计算过程采用以下任意一种形式:
36、若bintf为true,沿用thresholddiff,b、thresholddiff,c和thresholddiff,d;若bintf为false,且bmov为false,则thresholddiff,b = pb*absmax + qb*diffmax, thresholddiff,c =pc*absmax + qc*diffmax, thresholddiff,d = pd*absmax + qd*diffmax;
37、若bintf为false,且bmov 为true,则thresholddiff,b = pmb*absmax + qmb*diffmax,thresholddiff,c = pmc*absmax + qmc*diffmax, thresholddiff,d = pmd*absmax + qmd*diffmax;
38、或
39、若bintf为true,沿用thresholddiff,b、thresholddiff,c和thresholddiff,d;若bintf为false,且bmov为false,则thresholddiffbdiff,b = pb*tabsmax + qb*tdiffmax,thresholddiff,c = pc*tabsmax + qc*tdiffmax, thresholddiff,d = pd*tabsmax + qd*tdiffmax;
40、若bintf为false,且bmov 为true,则thresholddiff,b = pmb*tabsmax + qmb*tdiffmax, thresholddiff,c = pmc*tabsmax + qmc*tdiffmax, thresholddiff,d = pmd*tabsmax +qmd*tdiffmax;
41、其中,包含pb,pc,pd的p,包含qb,qc,qd的q,包含pmb,pmc,pmd的pm,包含qmb,qmc,qmd的qm为在统计对目标活动的误报或漏报率之后获取的数值,tabsmax =αtabsmax +(1-α)absmax,tdiffmax =αtadiff +(1-α)diffmax,α为在统计对目标活动的误报或漏报率之后获取的滤波器系数,tabsmax初始为absmax,tdiffmax初始值为diffmax。
42、进一步地,在步骤s3中,对检测出的所述干扰点进行抑制,具体为采用以下任意一种进行抑制:
43、将检测出的所述干扰点置零,a[n...m]=0;
44、或
45、对检测出的所述干扰点的序列a[n...m]乘以包括汉明窗、汉宁窗在内的窗函数;
46、或
47、选择满足p<n,q>m的未受干扰的信号点p和信号点q,将序列a[n...m]中的所述信号点设定为a[p]和a[q]取值的线性差值,或将序列a[n...m]中的所述信号点设定为(a[p]+a[q])/2。
48、进一步地,对步骤s5中用于对所述傅里叶信号点的变化幅度进行检测的所述检测阈值进行动态调整,具体为:
49、设所述检测阈值为t;
50、当所述检测阈值为加性阈值时,所述检测阈值t = t + t’,当所述检测阈值为相对阈值时,所述检测阈值t = t *(1+ln(1+t’));
51、其中,t’为设定的动目标阈值,计算过程采用以下任意一种方式:
52、t’= s * intfsum;
53、或
54、t’= s * intfpsum;
55、其中,s为在统计对目标活动的误报或漏报率之后获取的数值,intfpsum为采用包括获取过往n次intfsum中的最大值、过往n次intfsum中的滑动平均值、通过alpha滤波后的intfsum。
56、一种用于执行如上述的抗干扰的目标检测方法的抗干扰的目标检测系统,包括:
57、信号接收模块,用于提供给雷达接收模拟回波信号,并通过模拟-数字转换器将所述回波信号转换成数字信号;
58、干扰信号检测模块,用于对所述数字信号中的每一个信号点进行包括幅度阈值、差值幅度阈值在内的干扰信号检测,获取所述数字信号中的干扰点,其中,所述幅度阈值和所述差值幅度阈值为对所述数字信号中所述信号点的差值最大值、差值累加值和数值最大值进行统计后,动态调整的阈值;
59、干扰信号抑制模块,用于对检测出的所述干扰点进行抑制;
60、傅里叶变换模块,用于将完成所述干扰点抑制的所述数字信号作为输入,进行傅里叶变换,生成傅里叶信号;
61、目标活动检测模块,用于依次将所述傅里叶信号中傅里叶信号点的输入mtd/mti检测器进行检测,若所述傅里叶信号点的变化幅度大于检测阈值,则认定有目标活动,其中,所述检测阈值为对所述干扰点的差值累加值进行统计后,动态调整的阈值。
62、一种计算机设备,包括存储器和一个或多个处理器,所述存储器中存储有计算机代码,所述计算机代码被所述一个或多个处理器执行时,使得所述一个或多个处理器执行如上述的方法。
63、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机代码,当所述计算机代码被执行时,如上述的方法被执行。
64、与现有技术相比,本发明包括以下至少一种有益效果是:
65、(1) 通过对检测阈值依据干扰点的差值累加值进行统计后,动态调整阈值。采用上述技术方案后,不单纯依赖干扰信号检测模块-干扰信号印制模块抑制噪声,而是将干扰统计结果结合检测门限计算;这使得不存在干扰时,目标活动检测模块可保持交底的检测门限,提升灵敏度,存在干扰时,目标活动检测模块的门限可自适应提升,较好的平衡了雷达的误报和漏报特征。
66、通过对幅度阈值和差值幅度阈值依据数字信号中信号点的差值最大值、差值累加值和数值最大值进行统计后,进行动态调整。优化了干扰信号检测模块的门限设定,雷达安装场合多样,用单一的包括幅度阈值、差值幅度阈值在内的干扰检测阈值不能很好反映实际情况,通过自适应干扰信号检测模块的阈值设定,更好的识别干扰的发生,优化了干扰信号抑制模块的抑制效果。
- 还没有人留言评论。精彩留言会获得点赞!