智能真空箱检测系统及方法与流程
本技术涉及无损检测,具体涉及一种智能真空箱检测系统及方法。
背景技术:
1、真空设备在电力、化工、航空航天、船海领域有着广泛的应用。真空设备漏率的把控,是决定真空设备是否能发挥应有性能的决定性因素。尤其在一些大型真空设备的建造过程中,需要通过泄漏检测来进行质量控制,各种泄漏检测方法特点不同,也决定了其适用范围,有的适合粗检,有的适合精检测,有些方法只能进行局部小范围的检漏。在一些大型真空设备中,往往采用粗检与精检相结合,局部与整体漏率检测相结合的方式,真空箱检测作为一种局部粗检的方法,在大型真空设备的在建检测中应用广泛。
2、真空箱检测通过在待检测区域涂抹特质的起泡剂,当利用真空箱在待检区域建立局部压差后,若存在泄漏,则可在漏点处观察到气泡的不断出现(参考图1)。真空箱检测作为一种局部粗检的方式,也肩负着第一时间发现“大漏”的任务。
3、真空箱检测是一项人员密集型的检测工作,往往需要大量的检测以及配合人员,且真空箱的实施对于人员的经验要求较为苛刻。检测人员通过真空箱的观察窗来观察气泡的大小以及产生速率来判断漏率的大小,进而决定是否需要对该区域进行返修。开发智能化的检测系统及方法,不仅是降低操作人员劳动强度,同时也是摆脱真空箱检测对人员经验的依赖,是提高检测效率与精度的可靠途径。
技术实现思路
1、本技术实施例提供一种智能真空箱检测系统及方法,能够解决目前真空箱检测操作人员劳动强度高且对人员经验的依赖高的技术问题,避免漏检、错检。
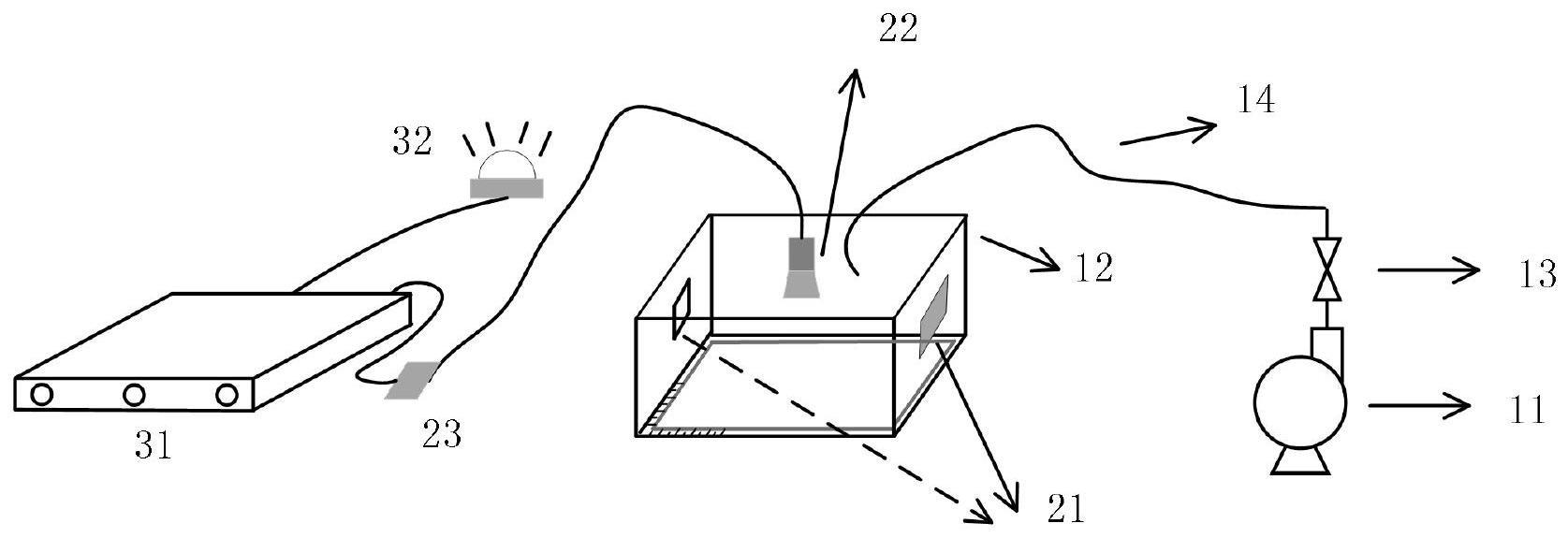
2、本技术实施例提供一种智能真空箱检测系统,包括抽真空系统、图像采集系统、漏率分析与报警系统;
3、其中,所述抽真空系统包括真空泵、真空箱、抽速调节阀、泵气管路;所述真空泵通过所述泵气管路连接至所述真空箱,且在所述泵气管路上设置所述抽速调节阀;所述真空泵用于抽出所述真空箱内气体,所述真空箱用于在被检测区域形成局部密闭空间,所述抽速调节阀用于控制所述真空泵抽气速率及保持压力;
4、所述图像采集系统用于对设于所述真空箱内被检测区域产生的气泡采集图像,并将采集图像传输到所述漏率分析与报警系统;
5、所述漏率分析与报警系统连接至所述图像采集系统,所述漏率分析与报警系统用于对采集图像进行处理分析,若漏率值大于告警阈值范围时则发出告警信息。
6、进一步的,所述真空箱为通过亚克力玻璃材料粘接而成的透明真空箱,所述真空箱的底部安装可更换的橡胶圈,以便与被检件形成密闭空间。
7、进一步的,所述真空箱的边缘刻有尺度,用于对所采集图像中气泡的尺寸进行校准。
8、进一步的,所述图像采集系统包括led照明光源、ccd摄像头、图像采集卡;所述led照明光源设于所述真空箱的侧壁上,所述ccd摄像头设于所述真空箱的顶部,所述图像采集卡电性连接至所述ccd摄像头;
9、其中所述led照明光源用于对所述ccd摄像头的补光照明,所述ccd摄像头用于对设于所述真空箱内被检测区域产生的气泡拍照记录,所述图像采集卡用于将拍照记录的图像信息采集存储为采集图像并传输到所述漏率分析与报警系统。
10、进一步的,所述漏率分析与报警系统包括运算模块、报警闪烁灯;
11、其中所述运算模块连接至所述图像采集卡,所述运算模块用于对采集图像进行处理分析,若漏率值大于告警阈值范围时则控制所述报警闪烁灯报警闪烁。
12、本技术还提供一种智能真空箱检测方法,包括步骤:
13、步骤1、在待检测区域上布置前文所述的智能真空箱检测系统,并保证其密封性;
14、步骤2、对应待检测区域对所述真空箱进行抽真空作业,待达到检测压力后关闭抽速调节阀,隔断真空泵与真空箱的连通以保持所述真空箱内的压力;
15、步骤3、在所述智能真空箱检测系统进行第一时长保压后进行保压检漏,控制所述图像采集系统对设于所述真空箱内被检测区域产生的气泡采集图像,并将采集图像传输到所述漏率分析与报警系统;所述漏率分析与报警系统用于对采集图像进行处理分析,若漏率值大于告警阈值范围时则判定该检测区域发现漏点并发出告警信息,否则判定该检测区域检测合格。
16、进一步的,所述对应待检测区域对所述真空箱进行抽真空作业步骤,包括:
17、在布置完成所述智能真空箱检测系统后,对待检测区域涂抹特制起泡剂,利用真空箱罩住待检测区域,打开与真空箱连接的抽速调节阀,将真空箱产生负压吸附在待检测区域的待检测部位。
18、进一步的,所述漏率分析与报警系统用于对采集图像进行处理分析步骤,包括:
19、对采集图像通过图像的锐化处理,提取气泡边缘,采用高斯函数对图像进行平滑处理,结合拉普拉斯-高斯算子,并根据二阶导数过零点来检测图像的边缘;
20、通过对气泡投影面积的测量,并将面积换算成气泡直径;其中根据对所采集图像像素点的测量可以获得气泡的投影面积;其中s代表图形面积,x,y为像素值,c为所提取的气泡边缘内的连通域,f是与真空箱内校准刻度相关的函数;所测得的面积通过换算成气泡等效直径d;
21、通过计算出气泡的演变时间t,其中f代表帧数,fr代表ccd相机的帧率,根据取时间倒数得出气泡的演变速率v;
22、在真空箱检漏中,通过计算获得漏点漏率;其中vavg为气泡产生的平均速率,davg为气泡的平均直径,pb为气泡内的气体压力。
23、本技术还提供一种智能真空箱检测方法,包括步骤:
24、步骤1、在待检测区域上布置前文所述的智能真空箱检测系统,并保证其密封性;
25、步骤2、对应待检测区域对所述真空箱进行抽真空作业,待达到检测压力后关闭抽速调节阀,隔断真空泵与真空箱的连通以保持所述真空箱内的压力;
26、步骤4、在所述智能真空箱检测系统进行动态压力变化检漏,控制所述图像采集系统对设于所述真空箱内被检测区域产生的气泡采集图像,并将采集图像传输到所述漏率分析与报警系统;所述漏率分析与报警系统基于bp神经网络,实现漏点漏率的动态判断。
27、进一步的,所述bp神经网络在使用前进行训练,训练bp神经网络的步骤包括:
28、设置神经网络初始参数,以气泡平均直径与平均演变速率将作为输入向量,以标准样件的漏率值作为所预期的输出;在规定抽速下,得到不同漏率的标准样件中,气泡平均直径、气泡平均演变速率与漏率的关系;
29、计算实际输出,并使用递归的方法从输出节点开始返回到中间隐藏层调整权重进行优化直至计算误差小于预设阈值,使得神经网络实现输入、输出映射关系。
30、本技术实施例提供的智能真空箱检测系统及方法,可在单人操作下,通过智能化的判读方式,高效,准确的实现对真空设备的局部粗检,能够降低检测操作人员的劳动强度且对人员经验的依赖度不高,避免漏检、错检,提升了产品检测准确率。
31、本发明的检测方法可实现检测装置现场连接,检测现象的自动判定。本检测系统及方法可在单人操作下,依据机器判读实现对lng薄膜型围护系统的局部粗检,降低了对检测人员数量以及经验的要求,提升了检测效率与可靠性。
- 还没有人留言评论。精彩留言会获得点赞!