一种光纤惯导系统的迭代式标定方法、装置、设备及介质与流程
本发明涉及卫星导航,具体涉及一种光纤惯导系统的迭代式标定方法、装置、设备及介质。
背景技术:
1、标定技术本质是一种误差补偿技术,即建立惯性组件测量误差的准确模型,并合理的设计实验来激励惯性组件的误差源,使得各误差系数都能被确定,最终通过对惯性组件的输出进行软件补偿来减小惯性组件的误差。惯性组件和捷联惯导系统在出厂之前必须经过精确标定,以保证误差模型中的参数被计算出来,并对惯性组件的输出进行补偿,以保证惯性组件输出的准确性,从而确保惯导系统的工作正常。
2、捷联惯导系统精度的提高,主要依靠两项关键技术:一、研制新型高精度惯性组件,从加工精度、工艺、材料等方面,全面提高惯性组件的测量精度;二、进行惯性组件误差的软件补偿,根据在不同的应用环境下建立的误差方程,对惯性组件误差进行补差,从而提高捷联惯导系统的导航精度。前者是一项长周期,高风险技术,而且只能做到有限的提高惯性组件精度。后者可通过对组件进行标定实验求得软件补偿的参数,从而对导航系统输出进行校正以提高系统导航精度。由于惯性系统的测试及补偿技术发展日益完善,根据测试数据来设计相应的软件补偿措施,是提高惯导系统的使用精度,降低系统的生产成本的重要技术。
3、惯导标定分为分立式标定和系统级标定。分立标定法是一种在实验室进行的内场标定,通过高精度转台提供基准及系统输入,利用惯性组件输出与转台输入之间的关系来确定惯性组件误差系数,进而完成标定;系统级标定则不限于标定环境,而且标定精度也较高,是以导航参数误差为观测量,利用滤波方法来辨识惯性组件的误差系数。相比分立式标定方法,系统级标定的观测量选择更加灵活,可标定的参数更多,对标定环境的限制更小,标定结果精度更高。
4、现有技术中均是一次性标定,仅根据一次系统级标定解算出来的误差模型参数与真实值存在较大误差,标定结果精度低。
技术实现思路
1、有鉴于此,本发明提供一种光纤惯导系统的迭代式标定方法、装置、设备及介质,解决现有技术中标定过程复杂、标定误差大的问题。
2、为达到上述目的,本发明提供如下技术方案:
3、第一方面,本发明实施例提供了一种光纤惯导系统的迭代式标定方法,包括:
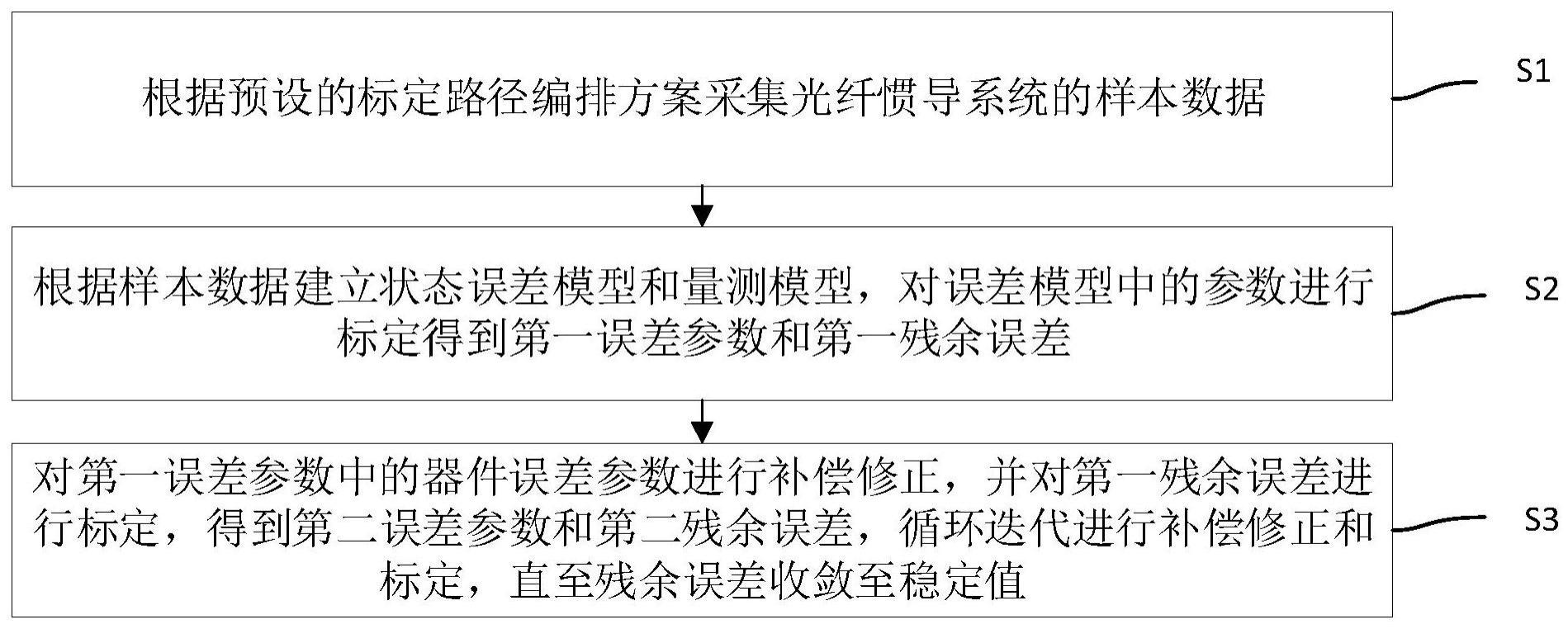
4、根据预设的标定路径编排方案采集光纤惯导系统的样本数据;
5、根据所述样本数据建立状态误差模型和量测模型,利用误差模型对误差模型中的参数进行标定得到第一误差参数和第一残余误差;
6、对第一误差参数中的器件误差参数进行补偿修正,并对第一残余误差进行标定,得到第二误差参数和第二残余误差,循环迭代进行补偿修正和标定,直至残余误差收敛至稳定值。
7、本发明实施例提供的光纤惯导系统的迭代式标定方法,利用一次的系统级标定数据进行反复迭代,使最终的标定结果误差最小,仅进行一次系统级标定,简化了标定过程,极大的节省了光纤惯导系统的标定时间。
8、可选地,根据预设的标定路径编排方案采集光纤惯导系统的样本数据包括:
9、光纤惯导系统绕x轴、y轴和z轴的正负各转动三次,每次转动的角度均为90度,采集十九个位置的加速度计加速度和陀螺角速度,组成样本数据,所述样本数据包括:陀螺数据和加速度计数据。
10、本发明实施例提供的光纤惯导系统的迭代式标定方法,通过设计合理的标定路径,充分激励陀螺仪和加速度计的误差参数,大大增强了误差参数的可观测性,位置编排紧凑,缩短了标定时间。另外,由于系统的位置变化主要通过系统本身来测量,可以通过陀螺仪测量角度的变化,也可以通过加速度计测量两个固定位置上的重力方向来精确测量,标定测试设备的误差对标定结果的影响只是二阶小量,因此本标定过程对标定测试设备要求不高。
11、可选地,所述误差模型包括:器件误差模型和惯性导航误差模型,其建立过程为:
12、以陀螺坐标系作为约束条件建立载体坐标系,得到器件误差模型,所述器件误差模型包括:陀螺的误差模型和加速度计的误差模型;
13、对样本数据进行惯性导航解算,得到惯性导航误差模型。
14、通过建立新的参考坐标系对载体坐标系进行约束,保证了标定结果的唯一性,建立器件误差模型和惯性导航误差模型,将所有相关误差考虑进来,保证后续计算的准确性。
15、可选地,根据所述样本数据建立量测模型包括:
16、建立卡尔曼滤波器模型,并从中提取卡尔曼模型的状态向量,所述状态向量中包含导航参数误差、惯性器件误差的相关元素;
17、将状态向量代入所述误差模型得到卡尔曼滤波器的状态方程;
18、将速度为零作为外部量测信息定义速度量测矢量,根据速度量测矢量建立卡尔曼滤波器的量测方程;
19、将卡尔曼滤波器的状态方程和量测方程离散化得到量测模型。
20、本发明实施例利用卡尔曼滤波器建立量测模型,根据系统的量测值来消除随机干扰,再现系统的状态,保证了量测模型的准确性和系统状态的准确性。
21、可选地,补偿修正过程为:
22、实时获取卡尔曼滤波器估计的导航参数误差和惯性器件误差;
23、若获取到惯性器件误差,则估计惯性器件误差的参数,将惯性器件误差反馈补偿到惯导系统内进行修正。
24、通过实时获取导航参数误差和惯性器件误差,通过闭环的形式对误差进行补偿修正,加快了卡尔曼滤波器的收敛速度,有利于更快的减小误差。
25、可选地,迭代过程为:
26、利用卡尔曼滤波器模型对惯性器件误差的参数进行标定,得到第一误差参数和第一残余误差;
27、利用误差模型对第一误差参数进行补偿,利用卡尔曼滤波器模型对第一残余误差进行第二次标定,得到第二误差参数和第二残余误差;
28、每次补偿修正的结果作为下一次补偿修正的参数,对上一次标定的残余误差进行标定,直至得到的残余误差收敛至稳定值。
29、本发明实施例提供的光纤惯导系统的迭代式标定方法,通过对一组标定数据进行迭代计算,节省了标定时间,多次迭代直至残余误差收敛至稳定值,稳定的误差值保证了标定结果的准确性,有利于实际应用。
30、可选地,所述第一误差参数包括器件的误差参数,所述标定过程的对象以及得到的结果包括器件的误差参数和导航误差参数。
31、由于器件误差是陀螺仪和加速度计器件本身的误差因素导致的,可以通过补偿修正进行调节,导航误差参数是随机产生的,无法通过补偿修正减小误差,所以从标定的所有数据中选择器件误差参数进行补偿修正,简化计算过程,提高效率。
32、第二方面,本发明实施例提供了一种光纤惯导系统的迭代式标定装置,所述装置包括:
33、获取模块,用于根据预设的标定路径编排方案采集光纤惯导系统的样本数据;
34、模型建立模块,用于根据所述样本数据建立状态误差模型和量测模型,对误差模型中的参数进行标定得到第一误差参数和第一残余误差;
35、迭代模块,用于对第一误差参数中的器件误差参数进行补偿修正,并对第一残余误差进行标定,得到第二误差参数和第二残余误差,循环迭代进行补偿修正和标定,直至残余误差收敛至稳定值。
36、本发明实施例提供的光纤惯导系统的迭代式标定装置,利用一次的系统级标定数据进行反复迭代,使最终的标定结果误差最小,仅进行一次系统级标定,简化了标定过程,极大的节省了光纤惯导系统的标定时间。
37、第三方面,本发明实施例提供了一种计算机设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面,或者第一方面任意一种可选实施方式中所述的方法。
38、第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行第一方面,或者第一方面任意一种可选实施方式中所述的方法。
- 还没有人留言评论。精彩留言会获得点赞!