基于ISAR成像和序列CLEAN的RCS近场测量方法
本发明属于测量,更进一步涉及电磁测量中的一种基于逆合成孔径雷达isar(inverse synthetic apeture radar)成像和序列clean算法的雷达散射截面积rcs(radar cross section)近场测量方法。本发明可用于通过测量探头获取目标的近场测量数据,结合isar成像和序列clean技术推出远场目标的rcs。
背景技术:
1、在雷达探测与目标识别技术领域中,雷达散射截面是反映待测物体散射特性的重要物理量。随着雷达技术发展,各类物体都离不开rcs的测量技术,其中包括陆地、海上、空中等需要进行电磁散射分析的大型目标。rcs测量按测量场地的不同,一般可以分为远场测量法、紧缩场测量法和近场测量法,对于电大目标,远场测量rcs要求非常长距离的测试场地和高功率测试设备,且测量精度容易受到测试环境的影响。紧缩场测量可大大缩短测试距离,但所需的抛物面造价高昂,设备运行及维护费用较高。近场测量方法作为一种新兴技术,具有测试距离短、投资成本低、可在室内进行、保密性强、测量精度高、信息量大、可全天候工作等优点。近场测量方法是在目标的辐射近区内通过扫描探头进行散射数据录取,然后通过一定的数据处理方式进行数据外推获得目标的远场rcs。目前isar成像测量方法不仅能获得目标的远场rcs,还能得到目标自身的散射特性,因此在计算电磁散射问题中应用较为广泛。
2、西北工业大学在其申请的专利文献“一种利用高分辨率成像获取目标rcs的方法”(申请日:2016.10.17,申请号:201610901056.3,申请公布号:cn 106569191 a)中公开了一种利用高分辨率成像获取目标rcs的方法。该方法实现的步骤主要是:第一步,采用滤波-逆投影算法对目标近场回波数据进行成像处理;第二步,通过clean算法由强到弱依次从二维像中提取初散射中心;第三步,将各散射中心作为离散的点散射源进行矢量合成重建目标的散射场,从而计算得到目标的rcs。虽然,该方法考虑到了散射中心附近出现的高旁瓣问题并采用clean算法进行散射点提取以抑制高旁瓣对外推结果的影响,一定程度上提高了精度,但是,该方法仍然存在三点不足之处是:其一,采用的成像算法为滤波-逆投影算法,其重建效果受选择的滤波器影响较大,往往为了得到一个较好的重建效果,需要反复尝试,严重影响计算效率。其二,由于clean算法无法提供所提取散射点的真伪,存在提取过程中,由于错误的提取了伪散射点,导致测量精度降低的问题。其三,采用clean算法进行散射点提取的过程本质是一个反卷积的循环过程,每提取一个散射点提取,就需要进行一次循环,而循环停止的条件取决于终止阈值设定的大小,理论上阈值越小,测量精度越高,但是计算时间就越长,严重影响了计算效率,反之则测量精度达不到要求。为了既满足精度要求,又满足效率要求,往往只能取决于测试者的经验,存在很大的不稳定性。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提出一种基于isar成像和序列clean算法的目标rcs近场测量方法,用于解决现有技术中重建效果受选择的滤波器影响较大的问题;现有技术中无法判断所提取散射点真伪的问题;现有技术中依靠测量者的经验来设置终止阈值,导致测量时间和测量精度存在极大的不稳定性的问题。
2、为了实现上述目的,本发明的思路是:本发明通过近场圆周测量获取目标的近场后向散射场幅相数据,直接通过后投影bp(back projection)成像算法对目标进行isar成像,无需采用滤波器进行匹配滤波,消除了滤波器对成像质量的影响。由于在实际近场测量中难以同时实现频率和扫描角度的全采样,从而导致目标的每个散射中心处均会产生旁瓣效应,本发明使用了序列clean算法,仅对散射中心进行提取,消除旁瓣对测量精度的影响。本发明引入了混乱度的概念,根据每一代混乱度的变化值,判断所提取散射点的真伪性,消除了错误提取伪散射点导致测量精度降低的问题。本发明给出了理想终止阈值计算公式,根据目标isar图像的幅相信息,通过数值计算的方式给出了理想终止阈值,解决了依靠测量者的经验来设置终止阈值,导致测量时间和测量精度存在极大的不稳定性的问题。
3、为实现上述目的,本发明采取的技术方案包括如下步骤:
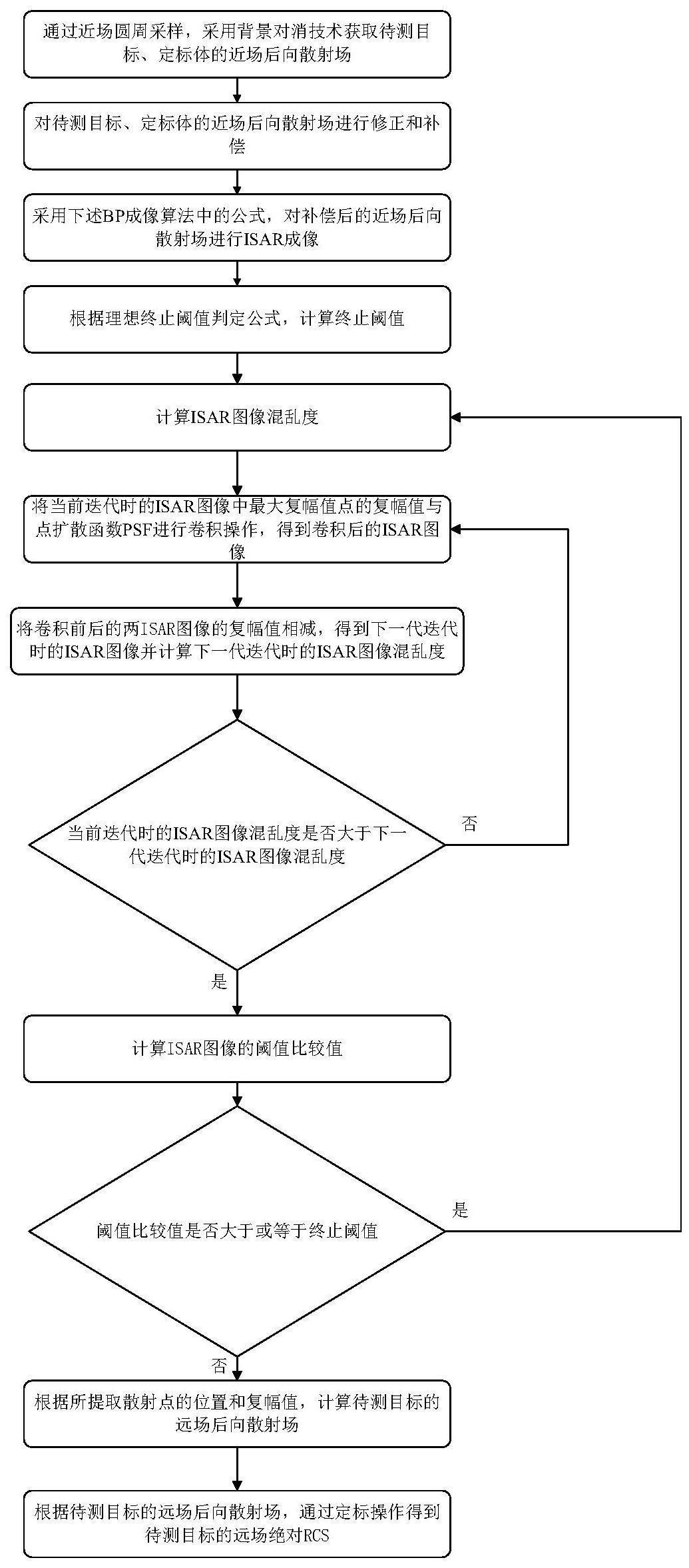
4、步骤1,获取待测目标和定标体补偿后的近场后向散射场:
5、步骤1.1,对待测目标、定标体和空背景进行采样,采用背景对消技术,分别提取采样频段、采样角度范围下待测目标和定标体的近场后向散射场;
6、步骤1.2,修正近场后向散射场中的相位和幅度后,再对修正后的近场后向散射场进行探头补偿,得到补偿后的近场后向散射场;
7、步骤2,采用下述bp成像算法中的公式,对补偿后的近场后向散射场进行isar成像:
8、
9、其中,isar(x,y)表示在笛卡尔坐标系中位于(x,y)成像点对应的复幅值,分别表示待测目标的采样角度的起始、终止角度,k1、k2分别表示待测目标的采样频段的起始、终止频率对应的波数,表示波数为k,采样角度为时补偿后的近场后向散射场,r表示在笛卡尔坐标系中位于(x,y)成像点到近场采样点的距离,e(.)表示以自然常数e为底的指数操作,j表示虚数单位符号,k表示采样频率f对应的波数;
10、步骤3,按照下式,计算终止阈值h:
11、
12、其中,lg(.)表示以10为底的对数操作,abs(.)表示取模运算符,n表示待测目标isar图像中成像点的总数,isar(xi,yi)表示在笛卡尔坐标系中位于(xi,yi)的第i个成像点的复幅值;
13、步骤4,利用序列clean算法分别提取待测目标和定标体的isar图像的散射点:
14、步骤4.1,按照下式,计算isar图像混乱度:
15、
16、其中,t0表示当前迭代时的isar图像isar0(x,y)混乱度,ymax、ymin表示在笛卡尔坐标系中在y轴的最大坐标值、最小坐标值,xmax、xmin表示在笛卡尔坐标系中在x轴的最大坐标值、最小坐标值,上角标“*”表示取共轭操作;
17、步骤4.2,将当前迭代时的isar图像中最大复幅值点的复幅值与点扩散函数psf进行卷积操作,得到卷积后的isar图像;
18、步骤4.3,将卷积前后的两isar图像的复幅值相减,得到下一代迭代时的isar图像,并采用与步骤4.1相同的公式,计算下一代迭代时的isar图像混乱度;
19、步骤4.4,比较当前迭代时的isar图像混乱度是否大于下一代迭代时的isar图像混乱度,若是,将当前迭代时的isar图像中最大复幅值点作为散射点后执行步骤5,否则,将当前迭代时的isar图像中次最大复幅值点作为下一次迭代时isar图像的最大复幅值点后执行步骤4.2;
20、步骤5,按照下式,计算isar图像的阈值比较值d0:
21、
22、其中,m表示在笛卡尔坐标系中isar图像的最大幅度值,l表示在笛卡尔坐标系中原始isar图像的最大幅度值,幅度值表示复幅值的模值;
23、步骤6,判断阈值比较值是否大于或等于终止阈值h,若是,则执行步骤4,否则,记录散射点提取中所有散射点的位置和复幅值后执行步骤7;
24、步骤7,根据所提取散射点的位置和复幅值,计算待测目标的远场后向散射场;
25、步骤8,根据待测目标的远场后向散射场,通过定标操作得到待测目标的远场绝对rcs。
26、本发明与现有技术相比,具有如下优点:
27、第一,本发明通过近场圆周测量获取目标的近场后向散射场,采用bp成像算法得到目标的isar图像,消除了滤波器对成像质量的影响,使得本发明鲁棒性好且在保证成像质量的前提下,减少了计算时间,提高了计算效率。
28、第二,本发明采用了序列clean算法,仅对散射中心进行提取,消除旁瓣对测量精度的影响。本发明引入了混乱度的概念,根据每一代混乱度的变化值,判断所提取散射点的真伪性,消除了错误提取伪散射点导致测量精度降低的问题,使得本发明提高了测量精度。
29、第三,本发明采用了序列clean算法的进行散射点提取时,给出了理想终止阈值的计算公式,解决了依靠测量者的经验来设置终止阈值,导致测量时间和测量精度存在极大的不稳定性的问题,使得本发明进一步减少了计算时间和提高了计算效率。
- 还没有人留言评论。精彩留言会获得点赞!