一种自移动设备的姿态估计方法、装置及可读存储介质与流程
本申请属于自移动设备,尤其涉及一种自移动设备的姿态估计方法、装置及可读存储介质。
背景技术:
1、即时定位与地图构建(slam,simultaneouslocalization andmapping)为机器人在自身位置不确定的条件下,在完全未知环境中创建地图,同时利用地图进行自主定位和导航。其中,自移动设备基于传感器采集的数据,通过姿态检测技术实现自主定位。
2、但姿态检测技术是假设环境是静态的,根据静态的特征点确定姿态。在实际场景中,常出现移动对象(例如移动中汽车、人等),这些移动对象会带来错误的数据,从而影响自移动设备的姿态估计的精度。
技术实现思路
1、本申请实施例提供了一种自移动设备的姿态估计方法、装置、自移动设备、可读存储介质和计算机程序产品,可以解决姿态估计的精度低的问题。
2、第一方面,本申请实施例提供了一种自移动设备的姿态估计方法,包括:
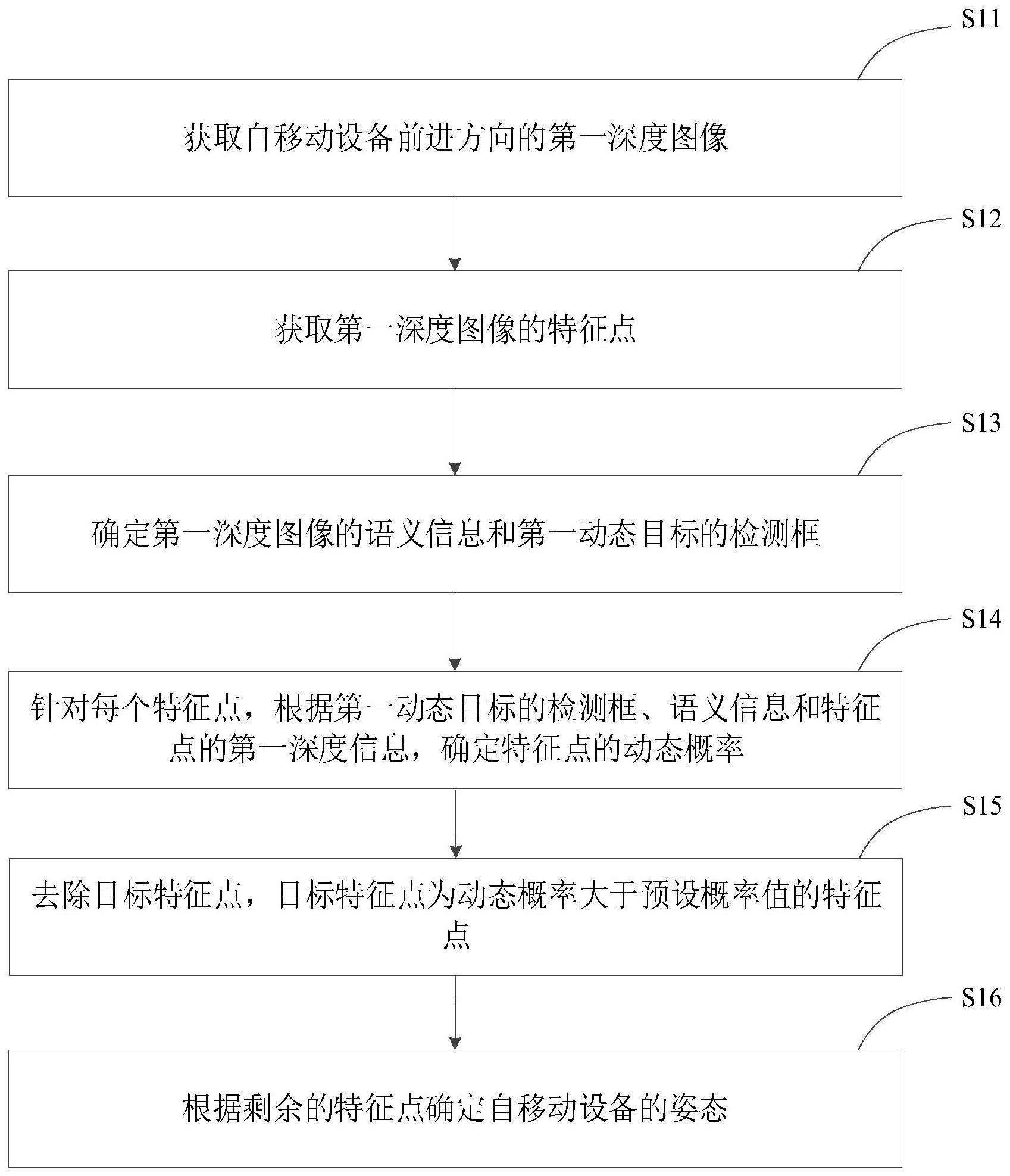
3、获取自移动设备前进方向的第一深度图像,所述第一深度图像为当前帧图像;
4、获取所述第一深度图像的特征点;
5、确定所述第一深度图像的语义信息和第一动态目标的检测框;
6、针对每个所述特征点,根据所述第一动态目标的检测框、所述语义信息和所述特征点的第一深度信息,确定所述特征点的动态概率,所述动态概率用于描述所述特征点位于动态目标的概率,所述第一深度信息用于描述第二深度图像的像素点的深度值,所述第二深度图像为上一帧图像;
7、去除目标特征点,所述目标特征点为所述动态概率大于预设概率值的特征点;
8、根据剩余的特征点确定所述自移动设备的姿态。
9、在一个实施例中,确定所述第一深度图像中的第一动态目标的检测框,包括:
10、当所述第一深度图像存在漏检目标,获取所述自移动设备的imu信息和所述第二深度图像的第二动态目标的检测框;
11、根据所述imu信息和所述第二动态目标的检测框,确定所述第一动态目标的检测框。
12、在一个实施例中,所述根据所述imu信息和所述第二动态目标的检测框,确定所述第一动态目标的检测框,包括:
13、根据所述imu信息,确定所述第一深度图像与所述第二深度图像之间的变换矩阵;
14、根据第三动态目标的检测框和所述第二动态目标的检测框,确定对应的动态目标的运动信息,所述第三动态目标的检测框为通过对所述第一深度图像进行目标预测获得的;
15、基于所述第二动态目标的检测框,根据所述变换矩阵和对应的所述运动信息,确定所述第一动态目标的检测框。
16、在一个实施例中,确定所述第一深度图像的语义信息,包括:
17、根据第一动态目标的检测框对应的第二深度信息,确定所述第一深度图像的语义信息,所述第二深度信息用于描述所述第一深度图像的像素点的深度值。
18、在一个实施例中,所述针对每个所述特征点,根据所述第一动态目标的检测框、所述语义信息和所述特征点的第一深度信息,确定所述特征点的动态概率,包括:
19、针对每个所述特征点,根据所述语义信息和所述第一动态目标的检测框,确定所述特征点所在的图像区域;
20、根据所述特征点所在的图像区域,确定所述特征点的第一动态概率;
21、将所述特征点的第一深度信息投影至所述第一深度图像,获得所述特征点的第三深度信息;
22、根据所述特征点的所述第三深度信息和所述第一深度信息,确定所述特征点的第二动态概率;
23、根据所述第一动态概率和所述第二动态概率和所述特征点在所述第二深度图像的历史动态概率,确定所述特征点的当前动态概率。
24、在一个实施例中,所述根据所述语义信息、所述第一动态目标的检测框,确定所述特征点所在的图像区域,包括:
25、当所述特征点的第二深度信息小于所述语义信息,确定所述特征点位于所述第一动态目标所覆盖的图像区域,所述语义信息用于描述所述第一深度图像的像素点的所述语义掩码值;
26、当所述特征点的第二深度信息处于所述第一动态目标的检测框的深度范围内,确定所述特征点位于所述第一动态目标的检测框内的图像区域,且不位于所述第一动态目标所覆盖的图像区域。
27、在一个实施例中,所述根据所述特征点的所述第一深度信息和所述第一深度信息,确定所述特征点的第二动态概率,包括:
28、根据所述特征点的所述第三深度信息和所述第一深度信息,确定差值信息;
29、根据所述差值信息,确定所述特征点的所述第二动态概率。
30、第二方面,本申请实施例提供了一种自移动设备的姿态估计装置,包括:
31、获取模块,用于获取自移动设备前进方向的第一深度图像,所述第一深度图像为当前帧图像;获取所述第一深度图像的特征点;
32、确定模块,用于确定所述第一深度图像的语义信息和第一动态目标的检测框;针对每个所述特征点,根据所述第一动态目标的检测框、所述语义信息和所述特征点的第一深度信息,确定所述特征点的动态概率,所述动态概率用于描述所述特征点位于动态目标的概率,所述第一深度信息用于描述第二深度图像的像素点的深度值,所述第二深度图像为上一帧图像;
33、去除模块,用于去除目标特征点,所述目标特征点为所述动态概率大于预设概率值的特征点;
34、姿态估计模块,用于根据剩余的特征点确定所述自移动设备的姿态。
35、第三方面,本申请实施例提供了一种自移动设备,包括:
36、车体,包括车身和车轮;以及
37、控制模块,用于执行如如上述第一方面中任一项所述的方法。
38、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面中任一项所述的方法。
39、第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在自移动设备上运行时,使得自移动设备执行上述第一方面中任一项所述的方法。
40、本申请实施例与现有技术相比存在的有益效果是:
41、本申请实施例通过确定第一深度图像的语义信息和第一动态目标的检测框;针对每个特征点,根据第一动态目标的检测框、语义信息和特征点的第一深度信息,确定特征点的动态概率,动态概率用于描述特征点位于动态目标的概率;去除目标特征点,目标特征点为动态概率大于预设概率值的特征点,能够准确去除动态目标的特征点,降低动态目标的特征点造成的影响,以能准确确定自移动设备的姿态,提高姿态估计的精度。
42、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种自移动设备的姿态估计方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,确定所述第一深度图像中的第一动态目标的检测框,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述imu信息和所述第二动态目标的检测框,确定所述第一动态目标的检测框,包括:
4.根据权利要求1至3任一项所述的方法,其特征在于,确定所述第一深度图像的语义信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述针对每个所述特征点,根据所述第一动态目标的检测框、所述语义信息和所述特征点的第一深度信息,确定所述特征点的动态概率,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述语义信息和所述第一动态目标的检测框,确定所述特征点所在的图像区域,包括:
7.根据权利要求5所述的方法,其特征在于,所述根据所述特征点的所述第三深度信息和所述第一深度信息,确定所述特征点的第二动态概率,包括:
8.一种自移动设备的姿态估计装置,其特征在于,包括:
9.一种自移动设备,其特征在于,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法。
技术总结
本申请一种自移动设备的姿态估计方法、装置及可读存储介质。所述方法包括:获取自移动设备前进方向的第一深度图像;获取第一深度图像的特征点;确定第一深度图像的语义信息和第一动态目标的检测框;针对每个特征点,根据第一动态目标的检测框、语义信息和特征点的第一深度信息,确定特征点的动态概率,动态概率用于描述特征点位于动态目标的概率;去除目标特征点,目标特征点为动态概率大于预设概率值的特征点;根据剩余的特征点确定自移动设备的姿态。本申请能够准确去除动态目标的特征点,降低动态目标的特征点造成的影响,以能准确确定自移动设备的姿态,提高姿态估计的精度。
技术研发人员:丘润,贺颖,于非
受保护的技术使用者:人工智能与数字经济广东省实验室(深圳)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!