基于路网路况时空变化的新能源车辆能量智能管理方法及系统
本发明涉及汽车节能控制,具体地,涉及基于路网路况时空变化的新能源车辆能量智能管理方法及系统,更为具体地,涉及一种用于新能源汽车的基于面向全路网的最节能路径规划和面向全路径的全局最优soc轨迹预测方法及系统。
背景技术:
1、随着汽车保有量的上升,交通运输领域的能耗日益增长,导致了严峻的环境问题和能源短缺问题。因此,为了降低交通领域的能耗,进一步节能减排,开发新能源汽车来取代传统汽车已成为一项重点技术手段,并获得了学术界和工业界的广泛关注。
2、整车能量管理策略(ems)是进一步实现新能源汽车能耗优化的重点。新能源汽车在不同工况下,应用不同的能量管理策略会实现不同的能耗。理论上,只有基于全程工况进行优化的ems,即全局ems才能得到全局最优能耗。但是,全局ems,例如动态规划(dp),庞特里亚金极小值原理(pmp)需要在汽车出发前预知全局工况,这在真实交通情景下是无法实现的,因此无法实时应用。因此,当前在线应用的ems均是以优化瞬时或短程能耗为目的的局部ems。特别的,为了提高对未知工况的利用程度以提升ems的工况自适应性,基于模型预测控制的ems(mpc-ems)因其具有短程工况预测能力而受到广泛的应用。但是,由于当前工况预测手段的限制,无法预测全程每一秒的工况,所以mpc-ems无法得到理论最优能耗。同时,当前的工况预测手段仅仅局限于对工况特征的利用,如利用新能源汽车的历史车速轨迹、平均加速度、驾驶意图。而在城市交通环境中,受大量交通设施和较大的车流量的影响,路况的时空动态变化,即宏观交通参数(mtp)对汽车行驶工况的影响发挥着更主要的作用,当前的ems忽略了对mtp的应用,因而其在节能效果有待提升。
3、另外,现有的ems仅仅是局限于开发在确定的行驶路径上的最优ems,即面向全路径的最优ems。而在城市交通路网中,针对同一对起终点,不同路径的路况不同,不同,从而影响了车辆的行驶工况,进而导致不同路径的的理论最优能耗不同。因此,若能在汽车出发前,就找到一条面向全路网的理论能耗最优的路径,并使汽车行驶在此路径上,那么路网降低新能源汽车能耗的潜力被进一步挖掘,比起仅针对确定路径的ems,新能源汽车的能耗将被进一步降低。
4、综上,现有的ems无法使新能源汽车实现在全路网和全路径两个尺度下的最优能耗。同时,现有的ems忽略了路网的交通参数对新能源汽车节能的影响。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于路网路况时空变化的新能源车辆能量智能管理方法及系统。
2、根据本发明提供的一种基于路网路况时空变化的新能源车辆能量智能管理方法,包括:
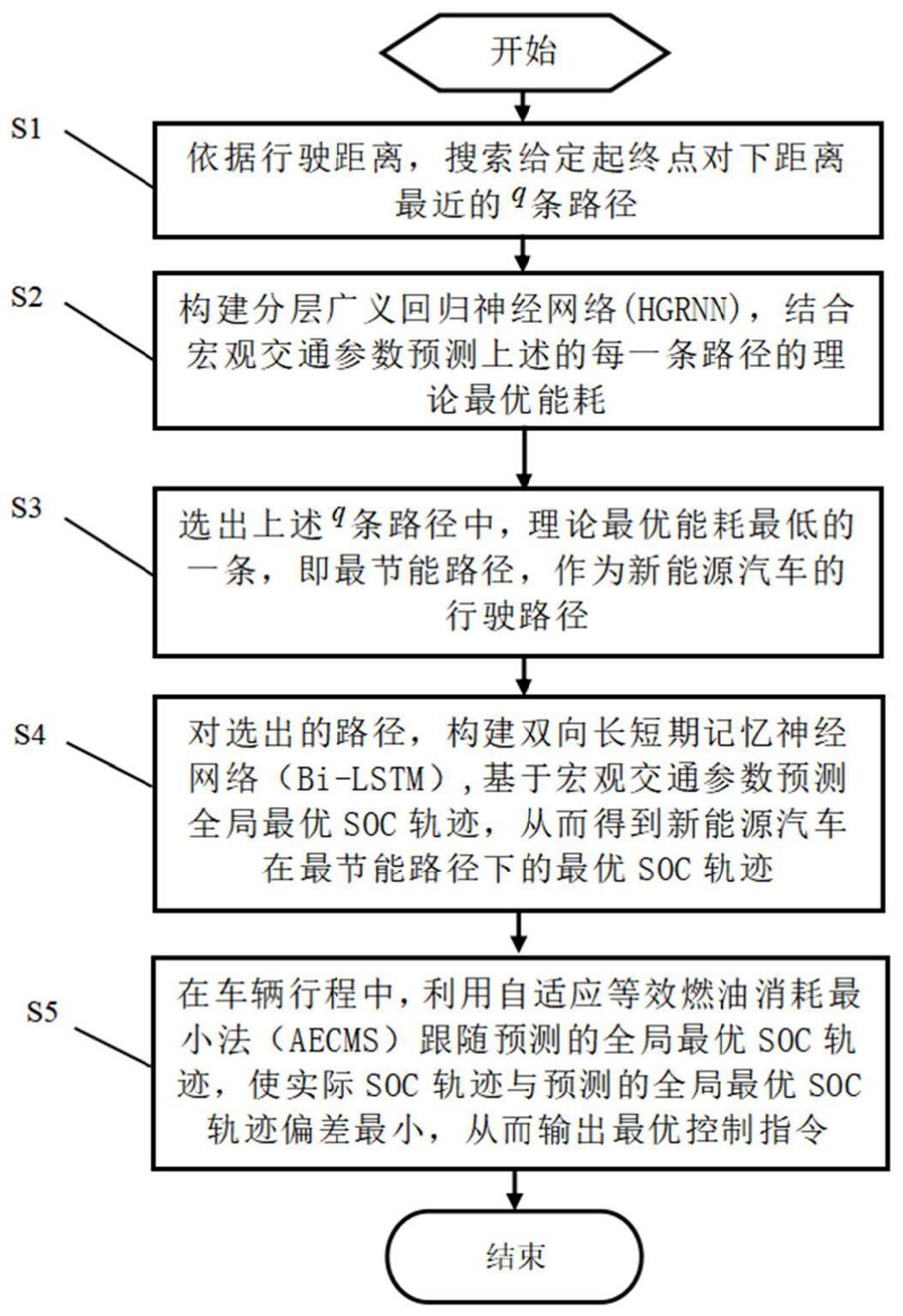
3、步骤s1:搜索给定起终点对下距离满足预设条件的q条路径;
4、步骤s2:构建分层广义回归神经网络,并利用构建的分层广义回归神经网络预测q条路径中每条路径的理论最优能耗;
5、步骤s3:基于q条路径中每条路径的理论最优能耗选择理论最优能耗最低的路径,并将理论最优能耗最低的路径作为新能源汽车的行驶路径;
6、步骤s4:构建双向长短期记忆神经网络,并利用构建的双向长短期记忆神经网络预测面向当前新能源汽车行驶路径的全局最优soc轨迹;
7、步骤s5:在车辆行程中,利用自适应等效燃油消耗最小法跟随预测的全局最优soc轨迹,使实际soc轨迹与预测的全局最优soc轨迹偏差最小,从而输出最优控制指令;
8、所述分层广义回归神经网络是通过上层广义回归神经网络(grnn)对路段通行时间进行预测,并将预测的通行时间与基于通行时间获得的宏观交通参数反馈给下层广义回归神经网络,从而实现对全程理论最优能耗的预测;
9、所述双向长短期记忆神经网络是通过两层长短期记忆神经网络层分别进行正向和反向计算,从而实现对全程soc轨迹的预测。
10、优选地,所述步骤s2采用:
11、步骤s2.1:构建上层广义回归神经网络,依次预测q条路径上每个路段的通行时间,同时基于通行时间依次获得路径上每个路段的宏观交通参数;
12、步骤s2.2:基于路段的宏观交通参数计算路径的宏观交通参数;
13、步骤s2.3:构建下层广义回归神经网络,基于路径的宏观交通参数预测q条路径的理论最优能耗;
14、所述路段的宏观交通参数包括:红灯剩余时间ri,t、绿灯剩余时间gi,t、路段距离li、路段交通密度ρi,t以及路段平均车速其中,i表示当前路径的第i个路段,t代表t时刻;
15、所述路径的宏观交通参数包括:路径平均速度n代表该路径有n个路段;路径速度极差路径速度标准差平均交通密度以及路径长度ln。
16、优选地,所述步骤s2.1采用:
17、步骤s2.1.1:记录到达当前路段i的时刻ηi;
18、步骤s2.1.2:根据到达当前路段的时刻ηi获得当前路段的路段宏观交通参数;
19、步骤s2.1.3:基于当前路段的路段宏观交通参数,利用上层广义回归神经网络预测当前路段的通行时间δti;
20、步骤s2.1.4:根据到达当前路段的时刻ηi和预测得到的当前路段的通行时间得到到达下个路段的时刻ηi+1=ηi+δti;重复触发步骤s2.1.1至步骤s2.1.4,直至获得整条路径上每个路段的通行时间和宏观交通参数。
21、优选地,所述步骤2.1.3包括:
22、步骤2.1.3.1:路段i在t时刻的宏观交通参数向量输入样本总量为qt表示,下标t是预测目标时间;将qt个样本处理成一个矩阵x,矩阵x的每一列代表一个样本;
23、步骤2.1.3.2:构建上层广义回归神经网络,包括输入层、模式层、求和层以及输出层;
24、步骤2.1.3.3:数据从输入层传递到模式层中,在模式层里,每个神经元经过下式计算,得到模式层输出:
25、
26、其中,是模式层第j个神经元的输出;上标t是上层grnn的预测目标:时间的简写;dist是欧几里得距离函数;xj代表矩阵x的第j列;δ是网络的平滑参数;
27、步骤2.1.3.4:模式层处理好的数据被传递进求和层进行计算;求和层可分为两部分,第一部分的计算公式如下:
28、
29、其中,st是求和层第一部分的输出;
30、第二部分的公式如下:
31、
32、其中,yjk代表第j个输出样本的第k个特征;
33、步骤2.1.3.5:两部分的计算结果被传递到输出层,经过下式计算,得到预测结果;计算公式如下:
34、
35、其中,代表预测的第i个路段在t时刻的通行时间。
36、优选地,所述步骤s2.2采用:
37、选择的路径宏观交通参数有路径平均速度路径速度标准差路径速度极差路径长度ln、路径交通密度
38、其中,n表示当前路径有n个路段;路径平均速度路径速度标准差路径速度极差路径长度ln、路径交通密度的计算公式分别为:
39、
40、
41、
42、
43、
44、其中,表示路段平均车速;li表示路段距离;ρi,t表示路段交通密度。
45、优选地,所述步骤s2.3采用:基于下层广义回归神经网络,利用动态规划算法dp计算整条路径的理论最优能耗的真值。
46、优选地,所述步骤s4采用:
47、步骤s4.1:构建双向长短期记忆神经网络,基于新能源汽车的行驶路径的路段宏观交通参数利用构建的双向长短期记忆神经网络预测路径上每个路段的最优soc梯度;
48、步骤s4.2:结合初始soc和路段长度计算全局最优soc轨迹;
49、
50、其中,soci+1表示第i个路段结尾处的soc值;socinit代表soc初始值;是最优路段soc梯度的预测值。
51、优选地,所述步骤s4.1采用:
52、步骤s4.1.1:将路段宏观交通参数处理为向量
53、步骤s4.1.2:构建双向长短期记忆神经网络模型,包括:输入层、全连接层、lstm层、全连接层以及输出层;其中,所述lstm层包括前向lstm层以及后向lstm层;
54、步骤s4.1.3:向量通过输入层输入至全连接层,利用全连接层提取路段的动态交通特征;
55、
56、其中,wxi是全连接层的权重,bxi是全连接层的偏置;
57、步骤s4.1.4:将动态交通特征输入至lstm层,利用前向lstm层学习上游路段的动态交通参数的影响;前向lstm层的数据传递方向和汽车行驶方向一致;前向lstm层每一个lstm单元的工作原理如下列公式所示:
58、
59、其中,i为第i个lstm单元,表示当前lstm单元的隐藏状态输出,ci表示当前lstm单元的状态;σ表示sigmoid函数;是权重,是偏置;会传递给前向lstm层的下一个神经元,会传递给前向lstm层的下一个神经元和全连接层;
60、步骤s4.1.5:输入数据也会进入后向lstm层,后向lstm层会利用下列公式对数据进行处理:
61、
62、其中,表示当前lstm单元的隐藏状态输出,表示当前lstm单元的状态;σ表示sigmoid函数;是权重,是偏置;会传递给前向lstm层的下一个神经元,会传递给前向lstm层的下一个神经元和全连接层;
63、步骤s4.1.5:前向lstm层和后向lstm层的输出数据被传递到全连接层提取输出结果;
64、
65、其中,wyi表示全连接层的权重,byi表示全连接层的偏置;表示最优路段soc梯度的预测值。
66、优选地,所述步骤s5采用:
67、步骤s5.1:设定初始的等价因子λ0;
68、步骤s5.2:指定控制量为发动机扭矩、电机扭矩,发动机转速、电机转速、电池功率,状态变量为soc;控制量和状态量需满足如下限制条件:
69、
70、其中,te(t)为发动机转矩,tm(t)为电机转矩,ωe(t)为发动机转速,ωm(t)为电机转矩,pbp为电池功率;下标_max和_min分别代表对应各项的最大值和最小值;
71、步骤s5.3:对控制量在每一秒工况下的限制范围进行离散,得到所有控制变量的离散点;
72、步骤s5.4:对由所有控制量的离散点组成的所有可行结果,用下式计算等效代价:
73、其中,
74、j=∑min{(meq(t)+a1δice(t)+a2|gtrans(t)-gtrans(t-1)|)}
75、meq(t)=mf(t)+λ(t)×pbp(t)/flhv
76、其中,meq(t)表示瞬时等效油耗;mf(t)表示瞬时油耗;λ(t)表示等效因子;pbp(t)表示瞬时电功率;flhv表示燃油低热值;δice(t)表示发动机启停状态的变化;gtrans(t)表示档位;a1和a2分别表示发动机启停变化引起的代价和档位切换引起的代价的权重,由实验台架标定;
77、步骤s5.5:选出所有可行结果里j最小的;
78、步骤s5.6:计算步骤s5.5所述可行结果对应的实际soc,基于实际soc与参考soc的误差,利用增量式pid调节等价因子,公式如下:
79、δλ(t)=kp[e(t)-e(t-1)]+kie(t)+kd[e(t)+e(t-2)-2e(t-1)]
80、e(t)=soct(t)-socr(t)
81、当前时刻的等价因子为:
82、λ(t)=λ(t-1)+δλ(t)
83、其中,kp,ki,kd分别为比例系数、积分系数、微分系数;soct(t)为实际的soc控制值,socr(t)为参考soc值;
84、重复步骤s5.4至步骤s5.6,直到实际soc与参考soc之间的差值小于阈值。
85、根据本发明提供的一种基于路网路况时空变化的新能源车辆能量智能管理系统,其特征在于,包括:
86、模块m1:搜索给定起终点对下距离满足预设条件的q条路径;
87、模块m2:构建分层广义回归神经网络,并利用构建的分层广义回归神经网络预测q条路径中每条路径的理论最优能耗;
88、模块m3:基于q条路径中每条路径的理论最优能耗选择理论最优能耗最低的路径,并将理论最优能耗最低的路径作为新能源汽车的行驶路径;
89、模块m4:构建双向长短期记忆神经网络,并利用构建的双向长短期记忆神经网络预测面向当前新能源汽车行驶路径的全局最优soc轨迹;
90、模块m5:在车辆行程中,利用自适应等效燃油消耗最小法跟随预测的全局最优soc轨迹,使实际soc轨迹与预测的全局最优soc轨迹偏差最小,从而输出最优控制指令;
91、所述分层广义回归神经网络是通过上层广义回归神经网络(grnn)对路段通行时间进行预测,并将预测的通行时间与基于通行时间获得的宏观交通参数反馈给下层广义回归神经网络,从而实现对全程理论最优能耗的预测;
92、所述双向长短期记忆神经网络是通过两层长短期记忆神经网络层分别进行正向和反向计算,从而实现对全程soc轨迹的预测。
93、与现有技术相比,本发明具有如下的有益效果:
94、1、本发明通过对新能源汽车理论最优能耗的预测,实现了新能源汽车面向全路网的最节能路径规划,为新能源汽车提供了一条理论能耗最优的路径;
95、2、本发明通过基于宏观交通参数实现新能源汽车全局最优soc轨迹的预测,突破了当前ems仅基于短程工况预测的局限性;
96、3、本发明通过将上述开发的新能源汽车面向全路网的最节能路径规划和面向全路径的最优soc轨迹预测算法结合起来,实现了新能源汽车的全局最优能量管理,使新能源汽车实现在全路网范围内获得最优能耗。
- 还没有人留言评论。精彩留言会获得点赞!