一种基于车轮参数标定与单目车道线检测的车辆定位方法
本发明涉及一种基于车轮参数标定与单目车道线检测的车辆定位方法,属于智能驾驶的定位领域。
背景技术:
1、智能驾驶的三大核心技术分别为感知、规划和控制,其中感知层用于理解车辆周围的位置和驾驶环境。定位系统旨在确定车辆在全球坐标系上的位置,并且被认为是堆栈中最关键的部分之一,因为其准确性和鲁棒性影响感知层后续算法以及后续的规划和行动层。
2、为了对车辆进行准确定位,目前通常使用三种技术。1.信号定位:例如全球导航卫星系统(gnss),超宽带定位技术(uwb);2.航迹推算:基于惯性测量单元(imu)技术在了解车辆初始位置后,累加位移矢量计算当前位置;3.环境特征匹配:基于激光雷达或视觉传感器的定位,即与存储在数据库中的特征匹配,以了解车辆的位置和环境。
3、上述几种技术都存在各自的不足之处。信号定位在城市峡谷、隧道、高架桥下等路段可能会出现接收不到定位信号的情况;航迹推算受传感器自身误差影响,长时间的积分过程会造成严重的轨迹漂移;激光雷达或视觉的slam定位算法所需计算资源较多且传感器本身价格较高。
4、鉴于以上原因,本发明提出一种基于车轮参数标定与单目车道线检测的车辆定位方法,以解决上述方法中的不足之处。
技术实现思路
1、本发明的目的是提出一种基于车轮参数标定与单目车道线检测的车辆定位方法,以解决在gnss信号不好时,车辆稳定定位的问题。
2、为实现上述目的,本发明提出了一种基于车轮参数标定与单目车道线检测的车辆定位方法,主要包括以下步骤:
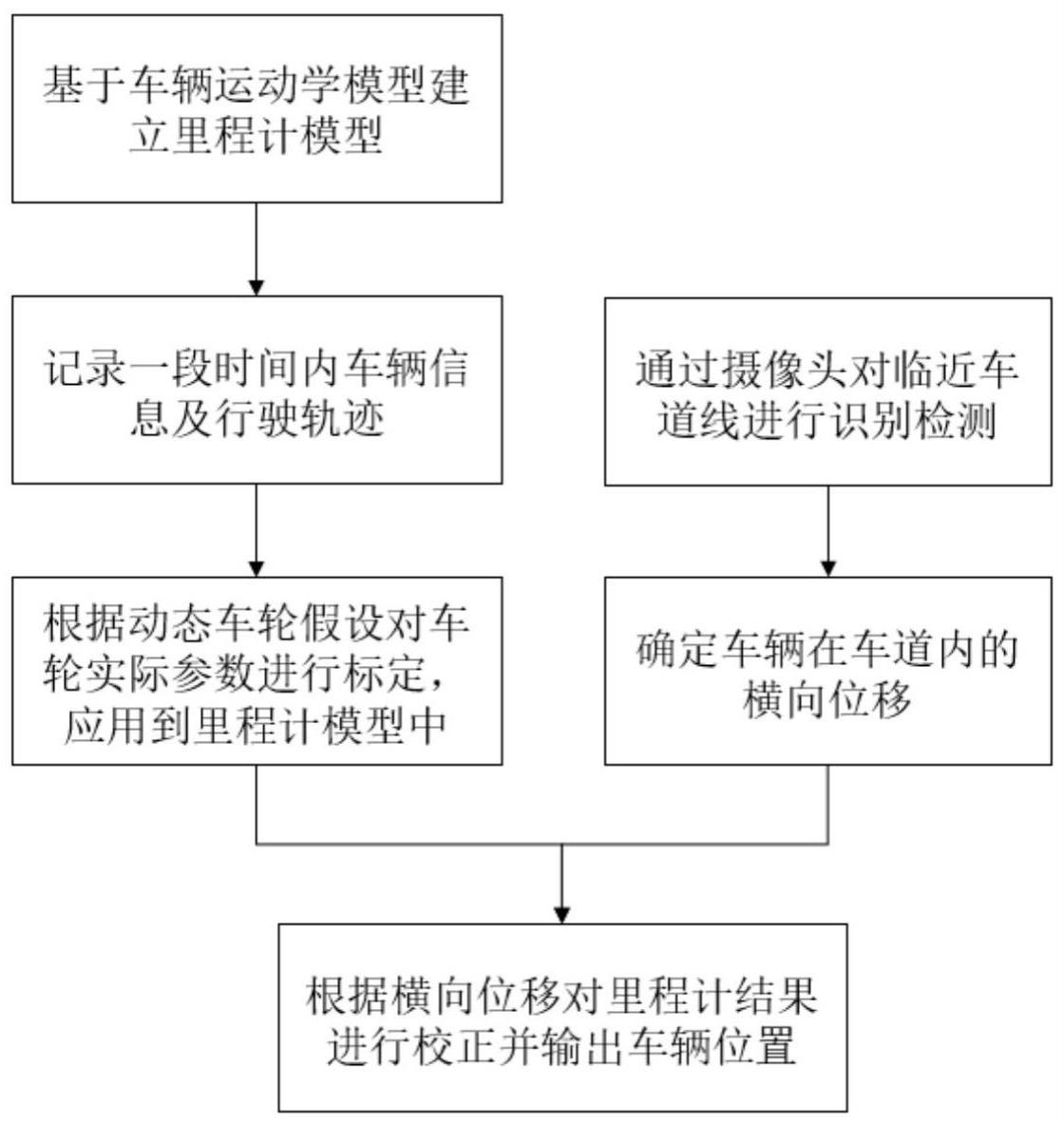
3、步骤1:基于车辆的运动学模型建立运动学里程计模型:通过车轮实际半径及后轴左右车轮的脉冲数来计算横摆角及未优化车速,并建立车辆的里程计模型,并且其中包含待优化的左后轮周长,左右后轮周长差,后轴轮距,载荷转移系数几项参数。
4、步骤2:根据动态车轮假设对车轮参数进行标定,并应用于运动学里程计:将车轮半径在车辆行驶过程中看作是动态的,引入态系数对车轮的理论半径进行修正,并通过之前所记录的车辆轨迹对左后轮周长,左右后轮周长差,后轴轮距,载荷转移系数进行优化,对里程计模型中的相应参数进行更新。
5、步骤3:通过摄像头对临近车道线进行识别检测:对摄像头采集图像进行图像校正、阈值化处理、曲线拟合等手段进行处理,检测提取出车道线信息。
6、步骤4:确定车辆在车道内的横向位移:根据设定的距离阈值对车辆行驶中自车所在车道的左右车道线进行识别,以车道及车道线的标准宽度为基准尺度,恢复出车辆在车道中横向位移的真实尺度。
7、步骤5:将基于车道线检测识别出的车辆横向位移与参数更新后的运动学里程计得到的横向位移按照相应置信度进行加权校正得到最终的定位结果,并输出位置信息。
8、本发明的有益效果是:本发明所提出的方法所需装置价格低廉、计算资源消耗少,可以解决在gnss信号丢失或信号质量差时,如何平稳衔接,为智能驾驶汽车提供车辆的定位信息的问题。
技术特征:
1.一种基于车轮参数标定与单目车道线检测的车辆定位方法,主要包括以下步骤:
2.根据权利要求1所述的基于车轮参数标定与单目车道线检测的车辆定位方法其特征在于:步骤1中基于车辆的运动学模型,通过车轮实际半径及后轴左右车轮的脉冲数来计算横摆角及未优化车速,并建立车辆的里程计模型,并且其中包含待优化的左后轮周长,左右后轮周长差,后轴轮距,载荷转移系数几项参数。
3.根据权利要求1所述的基于车轮参数标定与单目车道线检测的车辆定位方法其特征在于:步骤2中将车轮半径在车辆行驶过程中看作是动态的,引入动态系数对车轮的理论半径进行修正,并通过之前所记录的车辆轨迹用高斯牛顿法和集成卡尔曼滤波对左后轮周长,左右后轮周长差,后轴轮距,载荷转移系数进行优化,对里程计模型中的相应参数进行更新。
4.根据权利要求1所述的基于车轮参数标定与单目车道线检测的车辆定位方法其特征在于:步骤3中对摄像头采集图像进行图像校正、阈值化处理、曲线拟合等手段进行处理,检测提取出车道线信息。
5.根据权利要求1所述的基于车轮参数标定与单目车道线检测的车辆定位方法其特征在于:步骤4中根据设定的距离阈值对车辆行驶中自车所在车道的左右车道线进行识别,以车道及车道线的标准宽度为基准尺度,恢复出车辆在车道中横向位移的真实尺度。
6.根据权利要求1所述的基于车轮参数标定与单目车道线检测的车辆定位方法其特征在于:步骤5中将基于车道线检测识别出的车辆横向位移与参数更新后的运动学里程计得到的横向位移按照相应置信度进行加权校正得到最终的定位结果,并输出位置信息。
技术总结
本文公开了一种基于车轮参数标定与单目车道线检测的车辆定位方法,属于智能驾驶的定位领域。本定位方法可分为两大部分,一是车辆运动学里程计、二是基于车道线检测的横向定位。运动学里程计的具体方法为:基于动态车轮假设对车轮实际行驶中的周长等参数通过高斯牛顿法和集成卡尔曼滤波进行重新标定,减小运动学里程计的误差。横向定位的具体方法为:通过阈值化处理,曲线拟合等方法对车道线进行检测,并根据车道线检测结果计算车辆横向位移。最后对里程计以及横向定位的结果进行融合,输出车辆的当前位置。该种方法所需装置价格低廉、计算资源消耗少,可在GNSS信号丢失或信号质量差时,为智能驾驶汽车提供车辆的定位信息。
技术研发人员:许男,杨帆,杜杭,吴晓双
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!