一种城市低空无人机航线规划方法、装置和存储介质
本发明涉及无人机路径规划,尤其涉及一种城市低空无人机航线规划方法、装置和存储介质。
背景技术:
1、无人机融合先进制造、人工智能和移动互联网等技术,推动了人类社会生产方式和生活方式的变革。它的主要技术包括感知、定位、规划、控制、决策等五大模块,而带有承上启下作用的路径规划就是从感知到的带有障碍物的地图信息中自主规划出一条从起始点到目标点的安全、有效的路径,并将其输出到控制决策模块,以此完成无人机的高效作业。
2、随着无人机监测、巡查和测绘等低空技术得到广泛应用,低空长距离空中路径规划成为低空航空器应用面临的一个挑战。无人机需要根据地图生成路线,且路线需要进行优化使得无人机能够快速到达目的地,以达到无人机迅捷高效执行任务的效果。现阶段较主流的全局路径规划算法种类有图搜索法、仿生智能算法、快速随机搜索树算法,其中图搜索法的代表有a*算法,dijkstra等,但因其在规划过程中搜索特点导致遍历的节点较多,寻路效率较低;仿生智能算法的代表有粒子群算法,遗传算法,蚁群算法等,其缺点是运算量大,迭代时间长,实时性较差;而1998年lavalle提出的基于采样的快速随机搜索树算法(rapidly-exploring randomtree,rrt),与前两类规划算法相比较,因具有概率完备性、算法结构简单、在复杂环境中搜索能力强而被广泛使用。传统快速扩展随机树(rapidly-exploring random trees/rrt)能够快速生成路线,但是生成的路线并不能达到最优,这将导致无人机在运行过程中产生大量的能量消耗。近年来,针对rrt算法扩展节点的随机性大,生成的路径最优性较差等问题,研究人员提出了各种优化方法,其中包括加速路径生成的rrt goal bias(目标偏置策略)算法和b-rrt算法(双向搜索算法);以改进路径质量为目的的rrt*算法和inform rrt*算法;以二次修剪路径为目的的融合算法等共同促进rrt算法的发展。但目前对于rrt算法在复杂环境中扩展新节点时有较大的概率与障碍物发生碰撞而导致采样点的利用率低和规划得到的路径最优性差等问题依然没有较好的解决方法。除此之外,rrt算法在狭窄空间的道路中存在可能无法较快生成可行路径的问题,甚至无法生成路径的问题。有鉴于此,如何改善传统rrt算法规划路径过程中的采样点的利用率低和提高路径的最优性是目前亟待解决的技术问题。
技术实现思路
1、为至少一定程度上解决现有技术中存在的技术问题之一,本发明的目的在于提供一种城市低空无人机航线规划方法、装置和存储介质。
2、本发明所采用的技术方案是:
3、一种城市低空无人机航线规划方法,包括单无人机航线规划和考虑多无人机同时飞行的航线修改调整;
4、单无人机航线规划包括以下步骤:
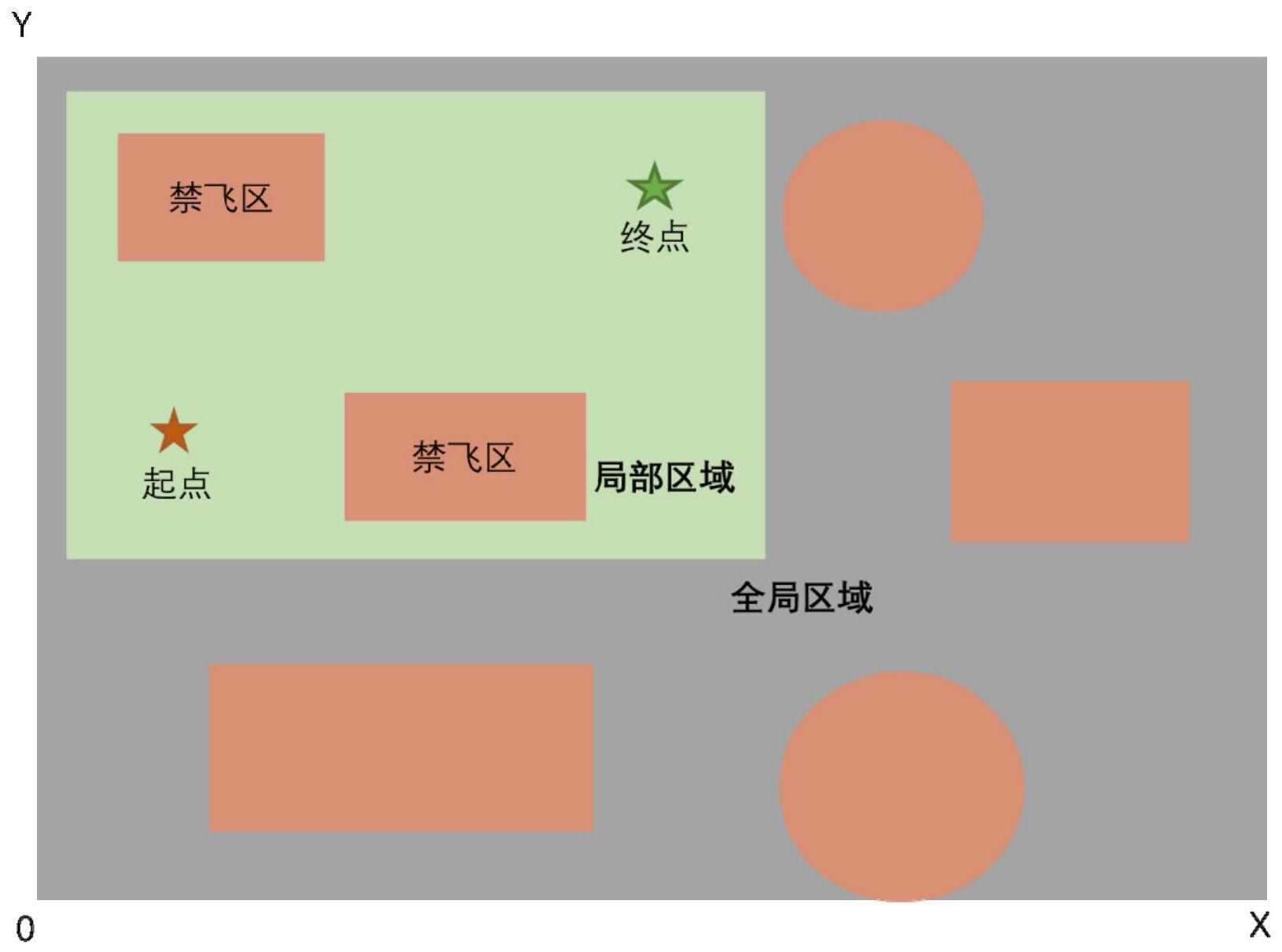
5、获取飞行的起点和终点,以及障碍物信息;
6、根据起点和终点确定航线搜索区域,根据航线搜索区域和障碍物信息,采用rrt*算法进行航线初步规划,获得初步航线;
7、对初步航线进行优化,获得最终航线;
8、考虑多无人机同时飞行的航线修改调整包括以下步骤:
9、当无人机的航线绕过障碍区域时,根据航线的航向设计安全间隔,根据安全间隔修改航线,以避免不同航向的无人机的航线之间产生航向冲突;
10、检测是否存在狭窄可飞行区域,若存有,根据狭窄空域的宽度和无人机的机动性能设置多个航道,根据无人机的航向,为进入狭窄可飞行区域的无人飞机分配航道,以确保不同航向的多架无人机飞行在不同的航道上。
11、进一步地,所述根据起点和终点确定航线搜索区域,包括:
12、设置最小搜索区域的长和宽;
13、连接起点和终点,获取连线的中点作为搜索区域的中心;
14、根据起点和终点之间的横向距离确定搜索区域的长,根据起点和终点之间的纵向距离确定搜索区域的宽,确定第一搜索区域;
15、判断第一搜索区域的面积是否大于最小搜索区域的面积,若是,将第一搜索区域作为航线搜索区域;或者,
16、将第一搜索区域的中心和最小搜索区域的中心重叠,获取包含第一搜索区域和最小搜索区域的最小区域,作为航线搜索区域。
17、进一步地,通过以下方式获取初步航线:
18、a1、以起点作为起始点,在航线搜索区域内随机撒点,选出一个x-rand作为采样点,从构建的树中寻找距离采样点x-rand最近的节点x-near;
19、a2、连接x-near和x-rand,将连接线的方向作为树生长的方向;设置树生长的步长,在树生长的这个方向上生长一个步长,在生长的末端会产生一个新的节点x-new,在原有的已经存在的节点中找到离x-new最近的点,将这两个点连接起来;
20、a3、进行x-rand到x-new的碰撞检测,若碰撞检测的结果为无碰撞,则将x-new节点作为x-near的子节点加入到树中;继续在航线搜索区域内撒点搜索;若碰撞检测的结果为有碰撞,则节点生成失败,删除x-new,重新进行撒点搜索;
21、a4、重复循环步骤a1-a3,直至生成的x-new到终点的距离小于一个步长,终止树的生长,将新节点与终点相连。
22、进一步地,所述对初步航线进行优化,获得最终航线,包括:
23、从生成的树中确定关键节点的父节点和子节点,连接父节点和子节点两个节点;所述关键节点指的是为避让障碍而产生的连接两个弯折航线的点;
24、进行碰撞检测,若碰撞检测结果为无碰撞,则将该关键节点的父节点和子节点连接形成的直线作为新航线;若碰撞检测结果为有碰撞,则将关键节点、父节点和子节点这三个节点连接生成两条线段;在这两条线段上,根据预设的步长迭代进行航线碰撞检测和航线优化。
25、进一步地,所述在这两条线段上,根据预设的步长迭代进行航线碰撞检测和航线优化,包括:
26、以关键节点作为出发点,以父节点和子节点作为终止点;
27、根据预设的步长在两条线段上逐步推进选定检测点,将两个检测点相连并进行碰撞检测,直至检测到碰撞,返回上一个碰撞检测点并进行记录;
28、根据记录的检测点更新关键节点,并以新的关键节点为新的出发点进行迭代检测、更新,直到最终获得优化后的航线。
29、进一步地,所述当无人机的航线绕过障碍区域时,根据航线的航向设计安全间隔,根据安全间隔修改航线,以避免不同航向的无人机的航线之间产生航向冲突,包括:
30、设计安全间隔,根据航线的航向检测障碍区域处于航线的左侧或右侧;
31、若检测障碍区域位于航线的左侧,根据安全间隔修改障碍物包络信息,并根据新的障碍物信息修改该航线;
32、若检测障碍区域位于航线的右侧,则无需修改航线。
33、进一步地,所述检测障碍区域处于航线的左侧或右侧,包括:
34、获取在通过障碍区域前的直线航线中两点,分别为a点=(px,py)及其后续航线中的b点=(qx,qy);
35、获取即将经过的障碍区域中一点为c点=(lx,ly);
36、获取向量ab=(qx-px,qy-py)与向量ac=(lx-px,ly-py),将两个向量进行叉乘,得到结果m,若m<0,则障碍区域在航线右侧,则执行右转时所需要的航线操作;若m>0,则障碍区域在航线左侧,则执行左转时所需要的航线操作。
37、进一步地,所述检测是否存在狭窄可飞行区域,若存有,根据狭窄空域的宽度和无人的机动性能设置多个固定航道,根据无人机的航向,为进入狭窄可飞行区域的无人飞机分配固定航道,包括:
38、若检测到多个障碍区域之间的空间大小小于预设值,将该区域标志为狭窄可飞行区域;
39、根据无人机机动性能将所述狭窄可飞行区域划分多条单向航道;
40、根据无人机的航向,为进入狭窄可飞行区域的无人机分配航道,以使得进入狭窄可飞行区域的无人机在固定的航道上飞行,避免无人机航线之间出现航向冲突。
41、本发明所采用的另一技术方案是:
42、一种城市低空无人机航线规划装置,包括:
43、至少一个处理器;
44、至少一个存储器,用于存储至少一个程序;
45、当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上所述方法。
46、本发明所采用的另一技术方案是:
47、一种计算机可读存储介质,其中存储有处理器可执行的程序,所述处理器可执行的程序在由处理器执行时用于执行如上所述方法。
48、本发明的有益效果是:本发明对单无人机的航线进行规划,同时考虑了多无人机同时运行的规划优化,能够兼顾在低空空域中飞行的无人机航线规划的快速性、路径最优性与安全性。
- 还没有人留言评论。精彩留言会获得点赞!