一种临近空间飞艇航迹规划方法与流程
本发明涉及航空交通,更具体的说是涉及一种临近空间飞艇航迹规划方法。
背景技术:
1、临近空间一般指距离地球海平面10-20km的空域,其介于常规航空飞行器飞行高度以及航天器飞行高度之间,具有非常重要的战略意义。在临近空间飞行的飞艇相比于常规飞行器有更大的侦查范围和更长的滞空时间;同时,相比于卫星,由于其位于电离层以下,受到的干扰更小,具有更高的观测和通信质量。因此临近空间飞艇具有非常广阔的应用前景,对于临近空间飞艇的应用则基于其航迹规划实现,采集规划路线上的数据。
2、而飞艇内部质量大部分由气体组成,因此在飞行过程中,艇内气体由于内外热交换而发生的热力学状态变化将对飞艇的浮力、外形等飞行特性产生无法忽略的影响,从而影响临近空间飞艇航迹。现有的有关于高空飞艇航迹规划方面的研究通常基于高度简化的热力学模型,在研究过程中通常假设飞艇的浮重调节过程瞬间完成而忽略阀门或鼓风机的调节能力限制、直接计算外部辐射对飞艇囊内气体的影响而忽略蒙皮的存在等。这些做法虽然使得问题的数学形式足够简介,便于通过迭代计算得出在定性层面上具有一定合理性的解,但过多的不当简化已经使热力学模型与实际情况有了较大的出入,从而使计算结果在实际飞行中的参考价值大打折扣。
3、同时,在临近空间的飞艇为了能够在较低的大气密度下也能维持浮重平衡,一般都采用软式飞艇构型,在这种情况下,飞艇内部气体与外部大气之间的压差就成为了一个事关飞行安全的重要指标。过高的压差会带来艇体爆炸的风险,而压差过低时飞艇又会无法维持完整的外形,进而由于体积减小而丧失浮力,最终导致坠毁。因此临近空间飞艇的航迹规划可以改变飞艇飞行过程中所处外部大气压环境,从而直接影响飞行安全。
4、因此,如何准确规划临近空间飞艇航迹,降低飞行安全风险是本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种临近空间飞艇航迹规划方法,在航迹优化问题的模型微分方程约束中引入热力学模型来从预先航迹规划的层面降低热力学过程可能带来的风险和代价,达到降低飞行安全风险和减小能源消耗的目的。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种临近空间飞艇航迹规划方法,包括以下步骤:
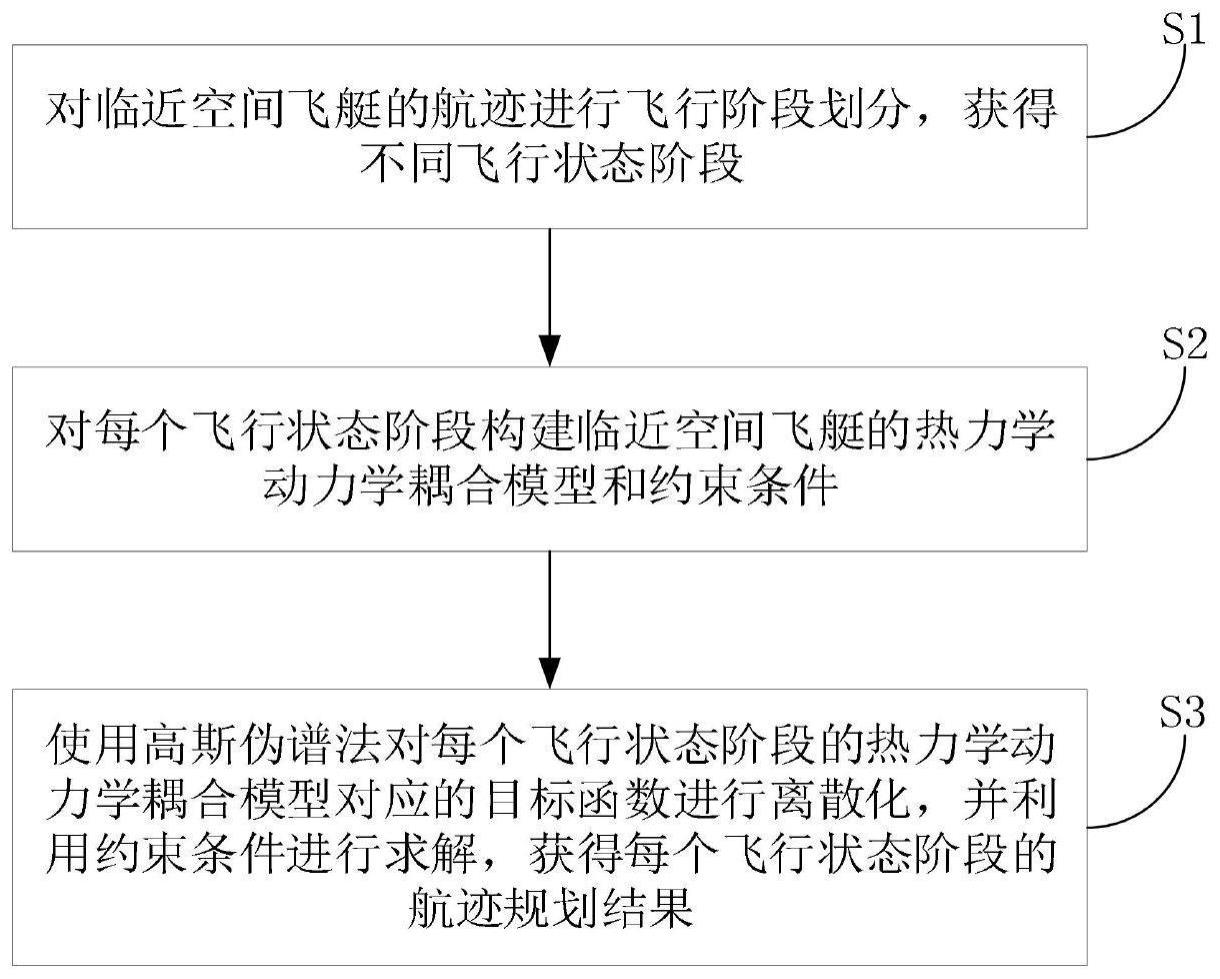
4、步骤1:对临近空间飞艇的航迹进行飞行阶段划分,获得不同飞行状态阶段;
5、步骤2:对每个飞行状态阶段构建临近空间飞艇的热力学动力学耦合模型和约束条件;
6、步骤3:使用高斯伪谱法对每个飞行状态阶段的热力学动力学耦合模型对应的目标函数进行离散化,并利用约束条件进行求解,获得每个飞行状态阶段的航迹规划结果。
7、优选的,对航迹规划结果进行控制分配,将航迹规划结果中的控制量转换为操作指令。
8、优选的,飞行状态阶段包括保形上升阶段、驻空飞行阶段、保形下降阶段和返场飞行阶段
9、优选的,步骤2中,构建临近空间飞艇的运动学模型、动力学模型、热力学模型和环境换热模型;
10、在保形上升阶段和保形下降阶段,将热力学模型耦合动力学模型中的飞艇竖直方向动力学模型、运动学模型,获得热力学动力学耦合模型;
11、在驻空飞行阶段和返场飞行阶段,将热力学模型耦合动力学模型中的飞艇水平方向动力学模型、运动学模型,获得热力学动力学耦合模型。
12、优选的,采用bolza问题形式表示热力学动力学耦合模型。
13、优选的,飞艇运动学模型包括飞艇位置运动学方程和飞艇姿态运动学方程,表示为:
14、
15、其中,表示飞艇运动学方程;x,y,z分别表示惯性坐标系的三个方向坐标;表示地面坐标系g和艇体坐标系b的转换矩阵的转置;υ表示在艇体坐标系b中的飞艇体心速度坐标,υ=[u,v,w]t,u,v,w分别表示三个方向的体心速度;c表示cos;s表示sin;ψ表示偏航角;θ表示俯仰角;
16、表示飞艇姿态运动学方程;φ表示滚转角;飞艇角速度在艇体坐标系b中的坐标表示为ω=[p,q,r]t,p,q,r分别表示三个方向角速度。
17、优选的,动力学模型表示为:
18、
19、其中,v表示空速向量;fay,fax,faz表示作用在飞艇上气流坐标系下的外力;表示航迹偏角;γ表示航迹倾角;m1,m2,m3,分别表示在气流坐标系下三个方向的质量分量;wax,way,waz分别表示在气流坐标系下三个方向的风速矢量。
20、优选的,临近空间飞艇包括超压气囊、外囊体和空气囊,超压气囊和外囊体中充满氦气,空气囊中充满空气,每个气囊中的每种气体均满足的热力学模型表示为:
21、
22、其中,表示总能量;qir表示红外辐射换热;qhc表示对流换热;he表示超压气囊中的氦气,he表示外囊体中的氦气,air表示空气囊中的空气;是流质引起的内能变化,是对外做功引起的内能变化。
23、优选的,保形上升阶段的选择状态量表示为:
24、x=[t,tf,tg,hg,hg_dot,mair]t
25、式中,t为上升时间;tf,tg分别为飞艇外蒙皮及飞艇内部气体温度,即外囊体氦气的温度和超压囊氦气、空气囊空气的温度;hg为飞艇所处海拔高度;hg_dot为飞艇高度的变化率,即飞艇上升速度;mair为空气囊中空气总质量;
26、选择控制量表示为:
27、u=[mair_dot]t
28、mair_dot表示空气囊中空气总质量的变化率;t表示转置;
29、约束条件表示为:
30、
31、目标函数表示为:
32、j=tf-t0。
33、优选的,驻空飞行阶段和返场飞行阶段的选择状态量表示为:
34、
35、式中,t为飞行时间;tf,tg分别为飞艇外蒙皮温度及艇内气体温度;xg,yg为飞艇在惯性坐标系下的坐标;v为空速向量,即飞艇在水平面内的空速;t为飞艇受到的总推力;为飞艇的航迹偏航角,为飞艇的航迹偏航角速度;
36、选择控制量表示为:
37、
38、式中,tdot为总推力的变化率;为航迹偏角的角加速度;
39、简化后的热力学动力学耦合模型表示为:
40、
41、式中ay为飞艇在艇体坐标系下受到的沿y轴方向的气动阻力,k2为飞艇在艇体坐标系y轴方向上的附加质量系数,wx,wy为惯性坐标系下x,y轴上的风速大小;
42、驻空飞行阶段包括区域驻留和任务航路飞行两种情况,则对应构建区域驻留目标函数和任务航路飞行目标函数;
43、区域驻留目标函数表示为:
44、
45、
46、
47、式中g(·)是飞艇到驻留区域中心的距离和驻留区域半径的正相关函数,qs_c为飞艇上太阳能电池阵收到的总辐射能量;a表示区域驻留,b表示获能最大,c表示能耗最低;
48、任务航路飞行目标函数表示为:
49、ja=tf-t0
50、
51、
52、
53、a表示飞行时间最短,b表示飞行航路最短,c表示获能最大,d表示耗能最低。
54、优选的,保形下降阶段的选择状态量表示为:
55、x=[t,tf,tg,hg,hg_dot,mair,mhe_ex]t;
56、选择控制量表示为:
57、u=[mair_dot,mhe_ex_dot]t;
58、式中,mhe_ex为外囊体氦气质量mair_dot为空气囊中充入空气的总质量流量;mhe_ex_dot为外囊体排出氦气的质量流量;
59、飞艇下降段的简化模型方程为:
60、
61、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种临近空间飞艇航迹规划方法,是飞艇保形升降及高低空水平飞行阶段的航迹优化方法,通过建立飞艇的热力学动力学耦合模型配合相关的约束和目标进行多约束优化求解得到最优轨迹,达到降低飞行安全风险和减小能源消耗的目的。本发明基于更为完整的飞艇热力学模型对航迹优化问题进行建模和求解,可以得出更为详细、更具有参考价值的规划结果。
- 还没有人留言评论。精彩留言会获得点赞!