位姿获取方法、设备以及存储介质与流程
本申请涉及计算机,特别是涉及一种位姿获取方法、设备以及存储介质。
背景技术:
1、近年来,移动机器人在巡检、物流、安防等各个领域得到广泛应用,极大地节省了人力物力,提高了工业生产的效率。在机器人执行货物搬运等任务时需要准确地估计目标的位置及姿态等信息,通过对目标进行识别定位,机器人能够准确地获取目标并搬运至指定位置。目前对目标进行定位的方式通常是采用对目标拍摄得到的图像,并基于图像信息对目标进行定位,但是这种方式不仅对场景的光照条件要求较高,同时也对计算机的运算性能要求较高。
技术实现思路
1、本申请至少提供一种位姿获取方法、设备以及存储介质。
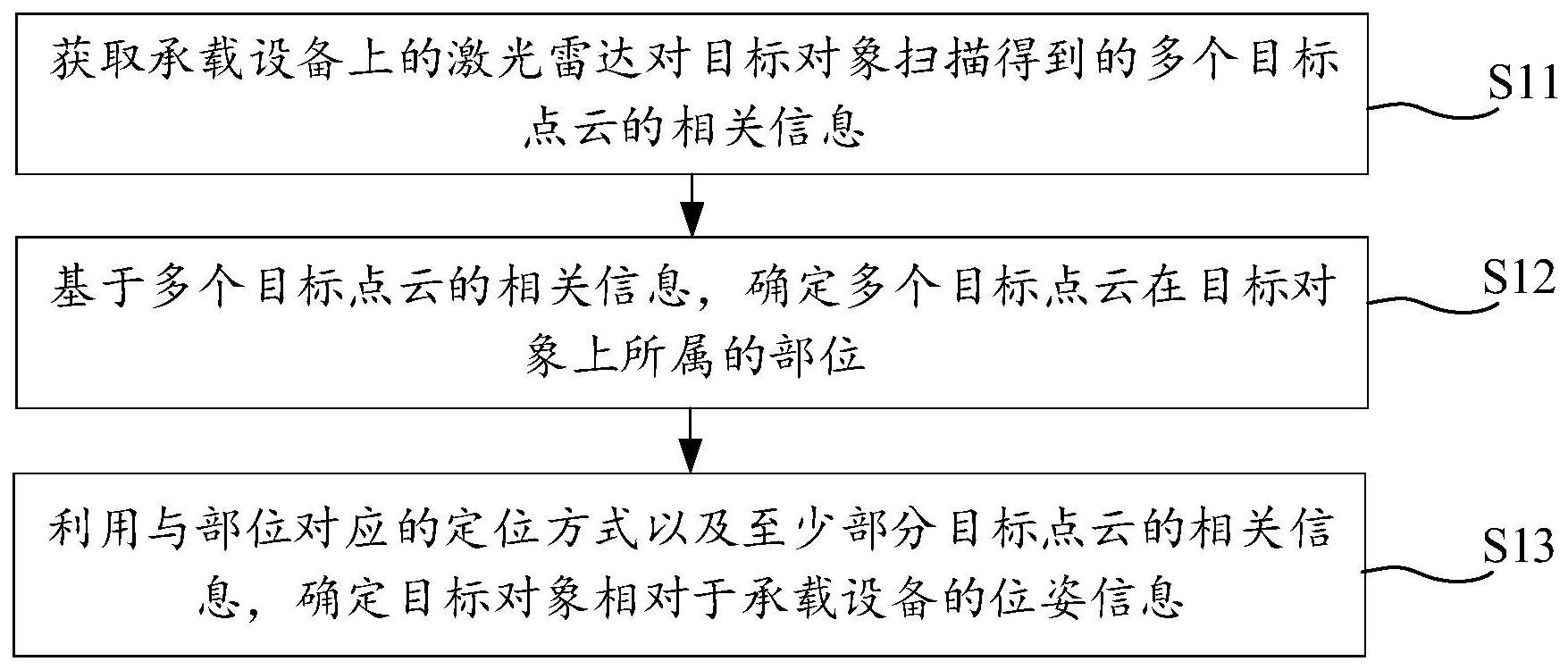
2、本申请提供了一种位姿获取方法,包括:获取承载设备上的激光雷达对目标对象扫描得到的多个目标点云的相关信息,目标对象包括若干部位;基于多个目标点云的相关信息,确定多个目标点云在目标对象上所属的部位;利用与部位对应的定位方式以及至少部分目标点云的相关信息,确定目标对象相对于承载设备的位姿信息,不同部位对应的定位方式不同。
3、本申请提供了一种位姿获取装置,包括:获取模块、确定模块以及定位模块;获取模块,用于获取承载设备上的激光雷达对目标对象扫描得到的多个目标点云的相关信息,目标对象包括若干部位;确定模块,用于基于多个目标点云的相关信息,确定多个目标点云在目标对象上所属的部位;定位模块,用于利用与部位对应的定位方式以及至少部分目标点云的相关信息,确定目标对象相对于承载设备的位姿信息,不同部位对应的定位方式不同。
4、本申请提供了一种电子设备,包括存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现上述位姿获取方法。
5、本申请提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述位姿获取方法。
6、上述方案,通过使用承载设备上的激光雷达对目标对象进行扫描得到关于该目标对象的多个点云,然后根据该点云对目标对象进行定位,相比于通过图像信息对目标对象进行定位而言,本方式对光照以及计算机算力等要求较低,另外,通过对多个点云所属部位进行分类,然后利于与部位对应的定位方式以及至少部分点云获取目标对象相对于承载设备的位姿信息,相比于使用单一的定位方式获取目标对象相对于承载设备的位姿信息而言,获得的位姿信息更为准确。
7、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种位姿获取方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述目标对象为所述承载设备承载的货架,所述部位包括层板和支柱,所述利用与所述部位对应的定位方式以及至少部分所述目标点云的相关信息,确定所述目标对象相对于所述承载设备的位姿信息,包括:
3.根据权利要求2所述的方法,其特征在于,所述目标点云的位置包括所述目标点云在所述激光雷达所处第一坐标系下的坐标,所述位姿信息包括所述目标对象所处的第二坐标系与所述第一坐标系之间的位置关系,所述利用多个所述目标点云中包括两个第一端点在内的n个目标点云,确定所述目标对象相对于所述承载设备的位姿信息,包括:
4.根据权利要求3所述的方法,其特征在于,所述对多个所述目标点云进行降维,包括:
5.根据权利要求2所述的方法,其特征在于,所述目标点云的位置包括所述目标点云在所述激光雷达所处第一坐标系下的坐标,所述位姿信息包括所述目标对象所处的第二坐标系与所述第一坐标系之间的位置关系,所述利用多个所述目标点云中的两个第一端点,确定所述目标对象相对于所述承载设备的位姿信息,包括:
6.根据权利要求1-5任意一项所述的方法,其特征在于,所述基于多个所述目标点云的相关信息,确定多个所述目标点云在目标对象上所属的部位,包括:
7.根据权利要求6所述的方法,其特征在于,所述形状包括直线,所述目标对象为所述承载设备承载的货架,所述部位包括层板,所述目标点云的相关信息包括所述目标点云的位置,所述基于多个所述目标点云的相关信息,确定多个所述目标点云对应的形状,包括:
8.根据权利要求7所述的方法,其特征在于,在所述利用预设主成分分析方式分别确定各区域内目标点云对应的最小特征值、最大特征值以及各特征值向量之前,所述方法还包括:
9.根据权利要求7所述的方法,其特征在于,所述方法还包括:
10.根据权利要求1-5任意一项所述的方法,其特征在于,所述目标点云的相关信息包括所述目标点云在所述激光雷达所处第一坐标系下的位置,所述获取承载设备上的激光雷达对目标对象扫描得到的多个目标点云的相关信息,包括:
11.根据权利要求10所述的方法,其特征在于,所述目标对象为所述承载设备承载的货架,所述按照各所述初始点云在所述第一坐标系下的位置对所述初始点云进行筛选,包括:
12.根据权利要求11所述的方法,其特征在于,所述按照所述可能承载位置对各所述初始点云进行筛选,得到所述目标点云,包括:
13.一种电子设备,其特征在于,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至12任一项所述的方法。
14.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至12任一项所述的方法。
技术总结
本申请公开了一种位姿获取方法、设备以及存储介质,位姿获取方法包括:获取承载设备上的激光雷达对目标对象扫描得到的多个目标点云的相关信息,目标对象包括若干部位;基于多个目标点云的相关信息,确定多个目标点云在目标对象上所属的部位;利用与部位对应的定位方式以及至少部分目标点云的相关信息,确定目标对象相对于承载设备的位姿信息,不同部位对应的定位方式不同。上述方案,能够提高获取得到的目标对象相对于承载设备的位姿的准确度。
技术研发人员:季博文,石鹏,林辉,蒋旭平,胡立志,卢维
受保护的技术使用者:浙江华睿科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!