一种GPS盲区导航方法、系统和可读存储介质与流程
本发明涉及导航,更具体的,涉及一种gps盲区导航方法、系统和可读存储介质。
背景技术:
1、目前,车主在不熟悉的路段上行驶,离不开gps(北斗)导航的指引,但gps的覆盖范围是有限的,在许多有大型顶盖或封闭空间的地方,往往存在gps导航的盲区,当车辆进入山谷、地下停车场等这些gps导航盲区时,就会给车主辨别方向、规划行车路线带来诸多困难,特别是在陌生的环境中,会给经常依赖导航的车主带来更大的麻烦。
2、因此,现有技术存在缺陷,亟待改进。
技术实现思路
1、鉴于上述问题,本发明的目的是提供一种gps盲区导航方法、系统和可读存储介质,能够更有效地解决了gps盲区的行车导航问题。
2、本发明第一方面提供了一种gps盲区导航方法,包括:
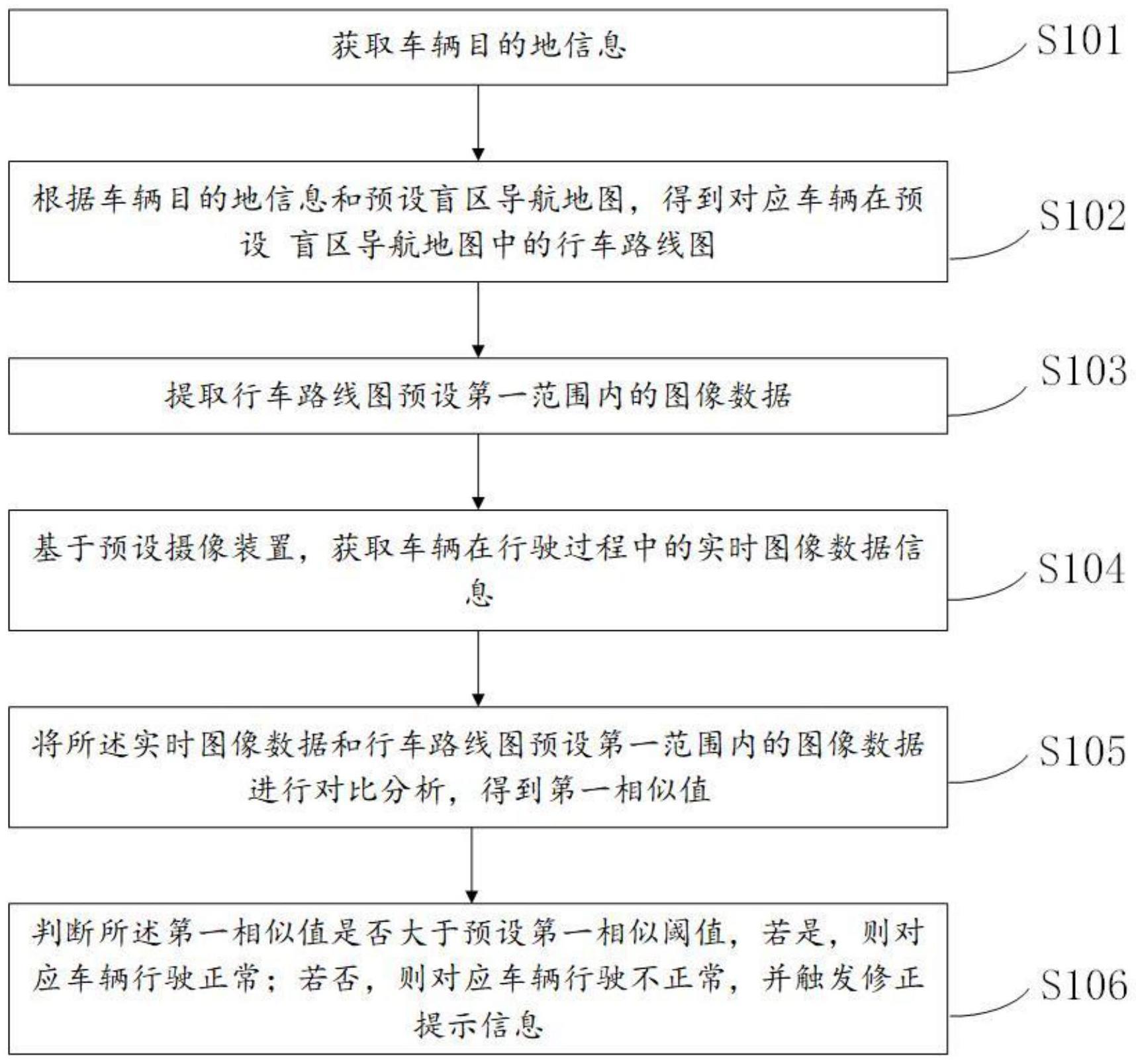
3、获取车辆目的地信息;
4、根据车辆目的地信息和预设盲区导航地图,得到对应车辆在预设盲区导航地图中的行车路线图;
5、提取行车路线图预设第一范围内的图像数据;
6、基于预设摄像装置,获取车辆在行驶过程中的实时图像数据信息;
7、将所述实时图像数据和行车路线图预设第一范围内的图像数据进行对比分析,得到第一相似值;
8、判断所述第一相似值是否大于预设第一相似阈值,若是,则对应车辆行驶正常;若否,则对应车辆行驶不正常,并触发修正提示信息。
9、本方案中,还包括:
10、获取gps导航信号信息;
11、判断所述gps导航信号是否小于预设信号阈值,若是,则记录对应gps导航信号小于预设信号阈值的时间值;
12、判断所述gps导航信号小于预设信号阈值的时间值是否大于预设时间阈值,若是,则将当前位置的预设第一范围设为导航盲区并进行标记;若否,则记录对应gps导航信号小于预设信号阈值一次;
13、基于预设第一时间周期,获取gps导航信号小于预设信号阈值的次数;
14、判断所述gps导航信号小于预设信号阈值的次数是否大于预设次数阈值,若是,则将当前位置的预设第一范围设为导航盲区并进行标记;若否,则显示导航正常。
15、本方案中,所述将当前位置的预设第一范围设为导航盲区并进行标记之后,还包括:
16、基于预设摄像装置,获取当前位置的预设第一范围的图像数据;
17、将所述当前位置的预设第一范围的图像数据信进行预处理,得到当前位置的预设第一范围的gps盲区补报数据;
18、将所述当前位置的预设第一范围的gps盲区补报数据发送至预设数据管理终端以进行存储。
19、本方案中,还包括:
20、获取车辆进入导航盲区之前的图像数据;
21、将车辆进入导航盲区之前的图像数据和gps导航数据进行对比分析,得到图像数据误差;
22、根据图像数据误差对该车辆的gps盲区补报数据进行修订。
23、本方案中,还包括:
24、将预设数据管理终端的gps盲区补报数据按照时间先后进行排序,得到第一个gps盲区补报数据;
25、将第一个gps盲区补报数据设为该导航盲区的初始gps盲区补报数;
26、基于预设第二时间周期,获取预设数据管理终端的gps盲区补报数据集;
27、将gps盲区补报数据集中的gps盲区补报数据按照图像数据误差进行排序,并提取图像数据误差最小的gps盲区补报数据;
28、将所述图像数据误差最小的gps盲区补报数据对初始gps盲区补报数进行更换。
29、本方案中,还包括:
30、提取预设第二时间周期内gps盲区补报数据的最小图像数据误差;
31、判断所述预设第二时间周期内gps盲区补报数据的最小图像数据误差是否小于预设误差阈值,若是,则将对应gps盲区补报数据设为最终gps盲区补报数据;若否,则继续收集车辆的gps盲区补报数据。
32、本发明第二方面提供了一种gps盲区导航系统,包括存储器和处理器,所述存储器中存储有一种gps盲区导航方法程序,所述一种gps盲区导航方法程序被所述处理器执行时实现如下步骤:
33、获取车辆目的地信息;
34、根据车辆目的地信息和预设盲区导航地图,得到对应车辆在预设盲区导航地图中的行车路线图;
35、提取行车路线图预设第一范围内的图像数据;
36、基于预设摄像装置,获取车辆在行驶过程中的实时图像数据信息;
37、将所述实时图像数据和行车路线图预设第一范围内的图像数据进行对比分析,得到第一相似值;
38、判断所述第一相似值是否大于预设第一相似阈值,若是,则对应车辆行驶正常;若否,则对应车辆行驶不正常,并触发修正提示信息。
39、本方案中,还包括:
40、获取gps导航信号信息;
41、判断所述gps导航信号是否小于预设信号阈值,若是,则记录对应gps导航信号小于预设信号阈值的时间值;
42、判断所述gps导航信号小于预设信号阈值的时间值是否大于预设时间阈值,若是,则将当前位置的预设第一范围设为导航盲区并进行标记;若否,则记录对应gps导航信号小于预设信号阈值一次;
43、基于预设第一时间周期,获取gps导航信号小于预设信号阈值的次数;
44、判断所述gps导航信号小于预设信号阈值的次数是否大于预设次数阈值,若是,则将当前位置的预设第一范围设为导航盲区并进行标记;若否,则显示导航正常。
45、本方案中,所述将当前位置的预设第一范围设为导航盲区并进行标记之后,还包括:
46、基于预设摄像装置,获取当前位置的预设第一范围的图像数据;
47、将所述当前位置的预设第一范围的图像数据信进行预处理,得到当前位置的预设第一范围的gps盲区补报数据;
48、将所述当前位置的预设第一范围的gps盲区补报数据发送至预设数据管理终端以进行存储。
49、本方案中,还包括:
50、获取车辆进入导航盲区之前的图像数据;
51、将车辆进入导航盲区之前的图像数据和gps导航数据进行对比分析,得到图像数据误差;
52、根据图像数据误差对该车辆的gps盲区补报数据进行修订。
53、本方案中,还包括:
54、将预设数据管理终端的gps盲区补报数据按照时间先后进行排序,得到第一个gps盲区补报数据;
55、将第一个gps盲区补报数据设为该导航盲区的初始gps盲区补报数;
56、基于预设第二时间周期,获取预设数据管理终端的gps盲区补报数据集;
57、将gps盲区补报数据集中的gps盲区补报数据按照图像数据误差进行排序,并提取图像数据误差最小的gps盲区补报数据;
58、将所述图像数据误差最小的gps盲区补报数据对初始gps盲区补报数进行更换。
59、本方案中,还包括:
60、提取预设第二时间周期内gps盲区补报数据的最小图像数据误差;
61、判断所述预设第二时间周期内gps盲区补报数据的最小图像数据误差是否小于预设误差阈值,若是,则将对应gps盲区补报数据设为最终gps盲区补报数据;若否,则继续收集车辆的gps盲区补报数据。
62、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有一种gps盲区导航方法程序,所述一种gps盲区导航方法程序被处理器执行时,实现如上述任一项所述的一种gps盲区导航方法的步骤。
63、本发明公开的一种gps盲区导航方法、系统和可读存储介质,通过盲区导航地图有效地解决了gps盲区的行车导航问题。
- 还没有人留言评论。精彩留言会获得点赞!