一种基于BIM和SLAM定位的网架建筑测量图谱智能拼接方法
本发明涉及网架建筑测量,特别涉及一种基于bim和slam定位的网架建筑测量图谱智能拼接方法。
背景技术:
1、网架建筑是一种以结构框架为主体的建筑。通常情况下,其构件之间以焊接、螺栓连接或者铆接方式相连,其中螺栓连接是网架建筑连接方式的主流。在大型网架建筑的维护中,对网架各个部位进行测量会产生大量的测量数据。然而,由于网架建筑复杂形态和高空环境的限制,对其测量难度较大,且测量数据的准确性和完整性难以保障。因此,如何高效、精确地获取网架建筑的测量数据并对其健康状态进行评估成为了目前亟需解决的难点问题。
2、针对网架建筑的智能测量和评估系统并没有完善的解决方案和产品,测量方法仍依赖于人工测量和半智能化测量装备,主要有以下局限:1)花费时间长、误差大、测量效率低;2)需要大量的人力和精力;3)无法对网架建筑进行全面健康评估,现有方法仅为抽测。
3、在中国申请号为cn202210681992.3和cn202210682006.6的发明专利文献公开了一种网架建筑结点的间距测量方法和一种网架钢构建筑结点的点云数据扫描方法,这两项发明提出的方法仍需要一定的人力辅助才能完成对网架建筑的全面测量和评估,在网架节点分布不均匀的场景下无法完成测量任务,对网架建筑的适用场景要求高。
技术实现思路
1、为了克服上述现有技术的不足,本发明的目的在于提供一种基于bim和slam定位的网架建筑测量图谱智能拼接方法,该方法以四足机器人为搭载装备,结合网架建筑的bim模型和slam定位技术在网架建筑场景内自主完成网架建筑测量图谱的智能拼接。不仅高效化、精确化实现网架建筑的健康评估,而且可以自适应地应用于复杂场景下的网架建筑。
2、为了实现上述目的,本发明采用的技术方案是:
3、一种基于bim和slam定位的网架建筑测量图谱智能拼接方法,包括以下步骤;
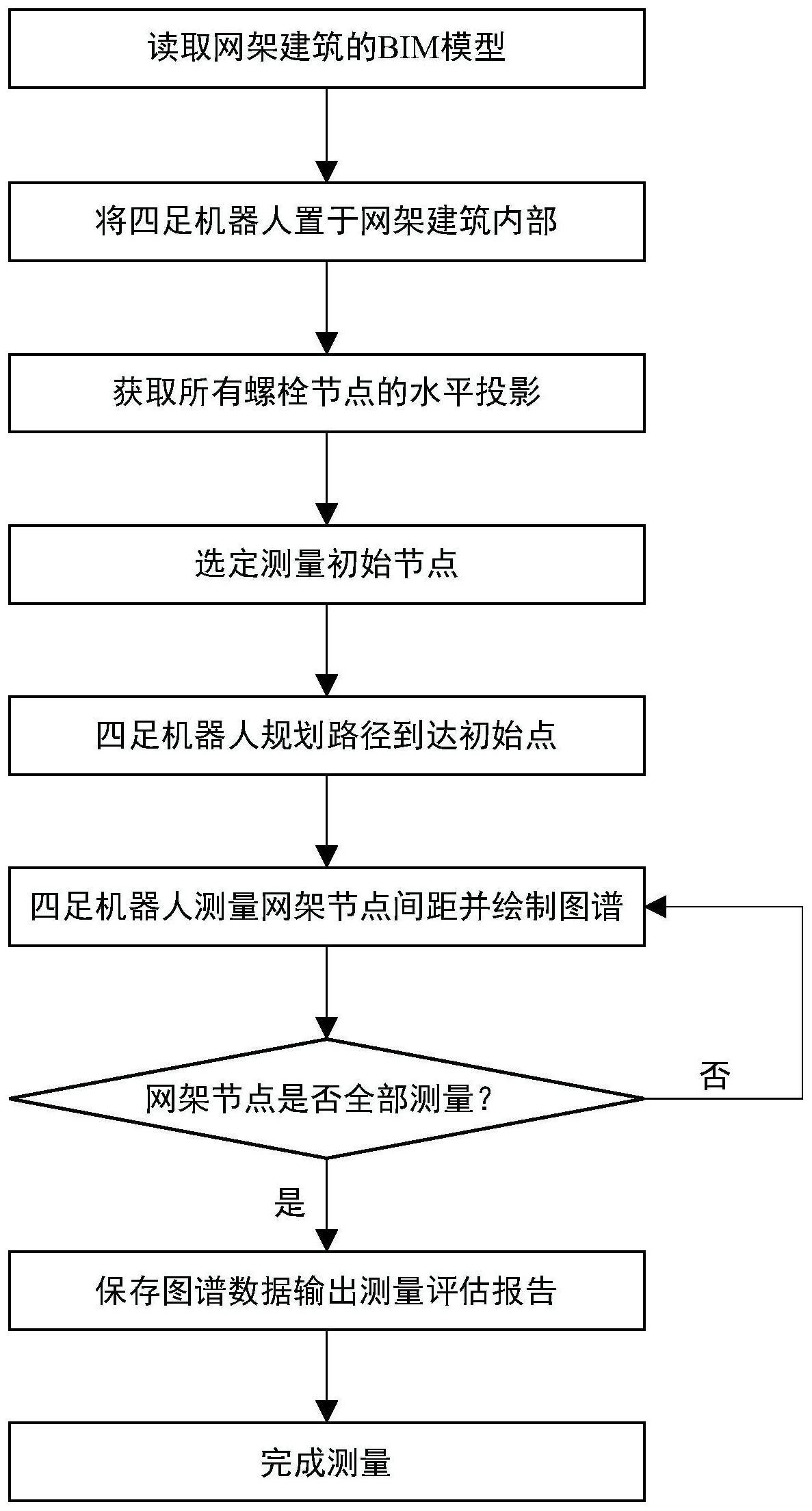
4、s1:利用网架建筑的bim模型结合slam定位算法确定四足机器人的自身姿态,得到四足机器人当前在建筑物中所处位置信息;
5、s2:通过网架建筑bim模型得到所有网架节点投影的水平位置,进而得到水平面的坐标点,选择左上角的网架节点作为测量初始点;
6、s3:四足机器人根据s1步骤中得到的位置信息,使用多线激光雷达边扫描边规划路径到达s2得到的初始点;
7、s4:四足机器人到达初始点的投影位置,测量该网架节点与其相邻节点的距离,将测量数据与bim模型中节点的信息进行比对,若出现误差则标注该误差,若没有误差则测量下一处节点数据,同时保存当前测量的图谱数据并进行拼接;
8、s5:重复s4步骤直到网架建筑中所有的节点都已被测量并保存图谱数据,输出测量评估报告。
9、所述步骤s1中,包括如下步骤:
10、s11、读取网架建筑的bim模型,其中包含整个网架建筑的三维模型以及其内部建筑元素的准确尺寸和位置,以四足机器人为搭载平台,在其上部搭载了测量设备和多线激光雷达设备;
11、建筑信息模型(bim)是创建和管理建筑资产信息的整体流程,bim基于由远程平台支持的智能模型,将结构化、多领域数据整合在一起,以在建筑物的整个生命周期(从规划和设计到施工和运营)内生成资产的数字表示。bim模型中不仅包含网架建筑中网架节点的相互位置,还能够精确指导四足机器人的自身姿态确定和路径规划;
12、s12、通过多线激光雷达扫描四足机器人当前所处位置的周围环境,再结合slam定位算法确定自身姿态;
13、s13、比对s11步骤得到的bim模型和s12步骤得到的四足机器人周围环境的三维信息,精确地确定四足机器人当前在网架建筑中的位置p1。
14、所述s2步骤中,已知网架建筑的bim模型,将其包含的网架节点的三维信息进行水平投影,得到投影后网架节点的水平位置,在水平面上投影得到的节点分布不均匀,该水平投影平面上涵盖了所有的网架节点,利用每一个网架节点的投影信息得到其投影坐标点,选定该投影平面左上角的网架节点作为测量初始节点,得到初始节点的投影坐标o(x0,y0)。
15、所述s3步骤中,已知在s1步骤中得到了四足机器人在网架建筑物中的所处位置p1,进而在s2步骤中得到了初始节点的投影坐标o(x0,y0),四足机器人自动规划路径从p1到达初始节点的投影坐标处,移动过程中多线激光雷达扫描并确认周围环境进行自动避障,比对扫描得到的三维信息和建筑物的bim模型进一步指导四足机器人的路径规划和自动避障,使其更精确地到达初始节点的投影位置。
16、所述s4步骤中,四足机器人测量网架建筑并保存图谱数据的过程包括如下步骤:
17、s41、当四足机器人到达从待测网架节点的投影位置后,多线激光雷达扫描周围的三维模型与bim模型中的数据进行比对,确保四足机器人位于待测网架节点的精确投影位置,因为多线激光雷达的精度取决于其扫描半径的大小,扫描半径越小精度越高,扫描半径越大精度相对较低,进而得到四足机器人和待测网架节点的距离越小越好,又因点面之间的最短距离是从该点开始垂直于该平面的直线,所以确保四足机器人位于网架待测节点在水平面上的精确投影位置,这样测量数据和生成的图谱数据的精度更高;
18、s42、四足机器人经其上部配备的测量设备开始测量,利用激光测距仪和姿态传感器测量得到四足机器人到待测节点的距离、四足机器人到待测节点相邻节点的距离以及两者之间的夹角(具体计算方式参照申请号为cn202210681992.3),经计算得到待测节点和相邻节点的距离信息,同时保存该段网架节点之间的间距图谱数据,上一相邻节点和下一相邻节点的图谱数据通过bim模型中已知的网架节点相对位置信息进行拼接;
19、s43、将s42步骤得到的测量数据与bim模型中的信息进行比对,若测量节点间距与bim模型中的节点间距存在差值,且超出或少于安全阈值1cm时,则此节点标注误差预警信息,若不存在差值则测量下一处相邻网架节点的距离数据;
20、s44、保存测量的节点与节点之间的距离数据、误差预警信息以及网架节点的间距图谱数据。
21、所述s5步骤中,当待测网架节点测量完毕之后,四足机器人移动到达下一网架待测节点,重复s4步骤直到网架建筑中所有的节点都已被测量并保存图谱数据,输出该网架建筑的整体测量评估报告;当某一待测网架节点的投影位置有无法跨越的障碍物阻碍四足机器人到达该网架待测节点的精确投影位置,此时四足机器人需要在此障碍物周围巡检一圈,在巡检时实时测量四足机器人当前位置距离待测网架节点的数据,巡检结束之后,选择距离数据最小的位置替代网架待测节点的投影位置,控制四足机器人到达该位置,测量该网架待测节点到相邻节点的距离以及网架节点图谱数据。
22、本发明的有益效果:
23、本发明在建筑行业智能化水平低下的背景下,将bim模型和slam定位技术有效结合到网架建筑智能化测量和评估中,使得大型网架建筑的测量方式不再局限于人工测量以及半智能化的设备,通过bim模型和slam定位技术互相指导,使四足机器人为搭载平台,搭载了测量设备以及多线激光雷达,高精度测量网架节点之间的距离和生成网架建筑的节点图谱数据,通过网架建筑的bim模型的比对,监测到存在误差的网架节点并智能化输出评估报告,测量过程高智能高精度高效率化完成。
24、本发明所提出的方法,采用多线激光雷达实现的网架建筑测量精度高,通过四足机器人搭载的方式进行网架建筑测量的时间和人力成本低,将bim模型、高精度slam定位方法和四足机器人搭载三种方法集成,在大场景网架建筑中可以实现网架节点的高精度测量以及网架节点图谱生成,最终输出网架建筑的测量评估报告,测量评估过程智能化高效化。
- 还没有人留言评论。精彩留言会获得点赞!