一种改进A*算法的船舶舱室移运路径优化及路径评价方法
本发明涉及船舶舱室模块装船移运路径规划领域,具体涉及一种改进a*算法的船舶舱室移运路径优化及路径评价方法。
背景技术:
1、随着船舶行业不断发展,需要建造的船舶越来越多,船舶开始向大型化、高速化、大吨位进行发展。在大型船舶建造过程中,舱室模块需要进行移运装船,并没有一套较为完整的技术,展现出较好的优化方法,来确立最优的装船时间。若没有较好的舱室移运路径规划方案,在船只的建造过程中,将无法保证最短时间内完成装船,造成造船周期延误,延期交船,产生连锁反应,推迟后续船舶建造计划,影响深远,使船厂蒙受重大损失。
2、路径规划是船舱移运装船过程中的核心问题之一,通常是指,在现有的移运设备,安装工艺,场地资源等条件的约束下,寻找每个舱室移运的最短路径,确立装船时间最短的装船方案。当前常用的路径规划算法有dijkstra算法,a*算法,遗传算法,蚁群算法等。在舱室移运过程中存在舱室较多,在搜索速度上dijkstra算法并不适用,而遗传算法和蚁群算法都可能陷入局部最优而不能保证全局最优,因此a*算法综合性能最好,与推舱路径移运问题契合度较高。
3、传统的a*算法在栅格图地图中,障碍物通常为一个黑色格子进行表示,可通行区域白色格子进行表示,但并不适用于船舶领域舱室移运路径规划问题,在船舶舱室移运路径规划中,障碍物为船舱墙壁,在栅格图中为分隔栅格图的线条,用加粗的线条代表墙壁障碍物,所以还需将a*算法进行进一步的改进,以适用于此问题。
4、目前为止,我国还未有对船舶建造过程中舱室移运路径优化问题有一套较为成熟的优化方案。因此需要一种船舶舱室移运路径优化与评价方法,来处理舱室移运路径规划的问题。
技术实现思路
1、发明目的:本发明提供了一种改进a*算法的船舶舱室移运路径优化及路径评价方法,该方法可以有效的解决装船过程中舱室移运路径的问题。为后续解决舱室移运路径优化提供一种新的思路。
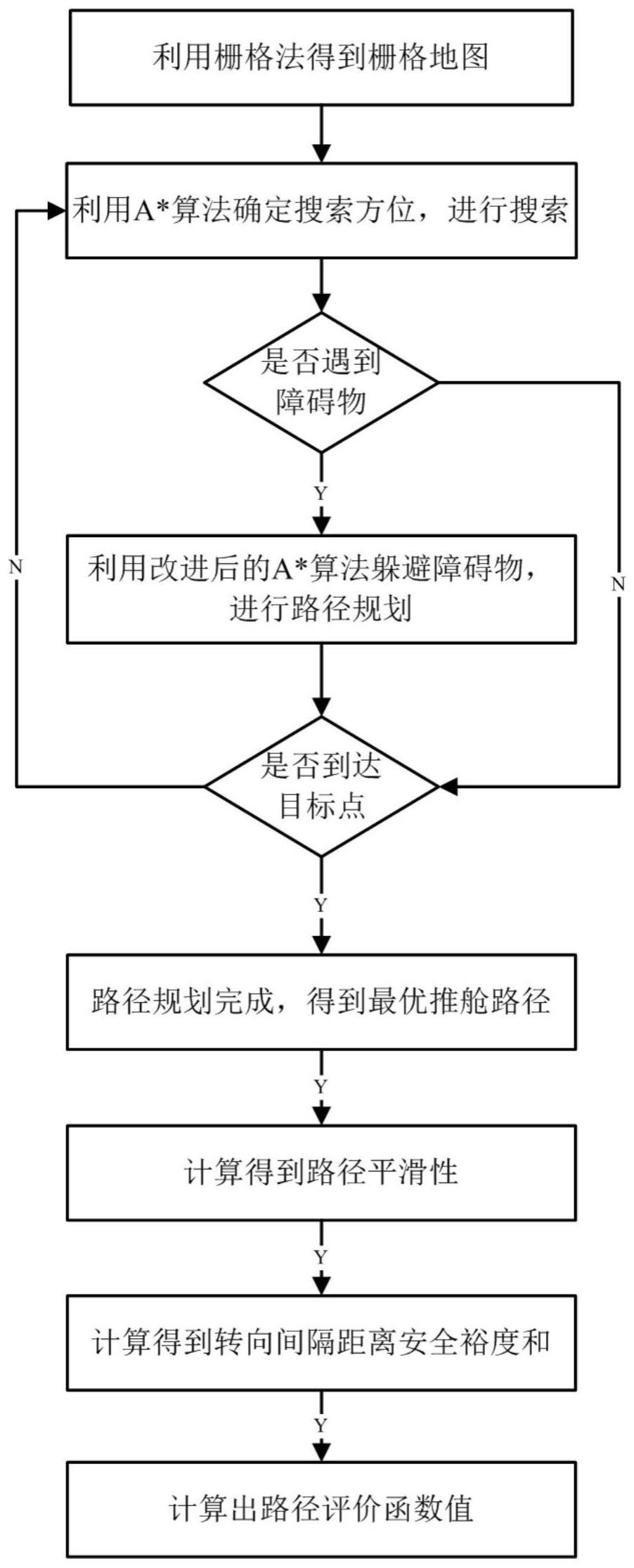
2、技术方案:为了解决上述问题,本发明提出了一种改进a*算法的船舶舱室移运路径优化及路径评价方法。包括如下步骤:
3、s1:获取船舶舱室模块移运环境栅格划分示意图,栅格地图的每个节点代表舱室可以通行的区域,加粗的线条表示墙壁,舱室无法通行,并确认起始点和终点。其中,栅格地图为r*c大小,r为栅格地图的行数,c为栅格地图的列数。选取船舶甲板区域建立二维直角坐标系,以该区域左舷侧位置为坐标系原点,船艏方向为x轴正方向,船中方向为y轴正方向,将每一栅格从原点沿x轴和y轴的正方向依次编号。
4、s2:对栅格图进行预处理,确立路径搜索的四个主要方向,设立二维数组mbarrier[]来存储搜索的四个位置坐标,设立二维数组best[]用来存放最终优化路径的坐标,对墙壁障碍物具体坐标位置进行预处理,判断无法通行的位置坐标,确定下一步的搜索位置。
5、s3:基于改进后的a*算法对全局路径进行规划搜索,在搜索遍历循环中使用公式mbarrier[]/best[]判断得到的最终值是否不为整数,以此来确定前进方向遇到墙壁障碍物,进行下一步的优化避让,搜索新的路径。搜索结束,计算从起点到终点的最优路径,并将得到的最终优化路径存入二维数组best[]。
6、s4:进行路径进行评价,在路径优化的过程中,计算出路径拐点数,路径拐点转角大小,路径的平滑性,路径相邻拐点间的间距,舱室模块两次转向间距的安全阈值,转向间隔距离的安全裕度和,最优路径长度,并根据路径评价函数f=w1lk+w2sk+w3dk计算出路径的函数值。
7、进一步的,步骤s1具体包括:基于船舶舱室分布划分为r*c的栅格图。划分出的格子代表舱室可以通行的区域,加粗的栅格图线条代表船舱的墙壁。将舱室的起点和终点,舱壁障碍物转化为栅格地图上的具体坐标。
8、进一步的,步骤s2具体包括:对栅格地图进行预处理,对舱室下一步的位置进行判断,判断周围四个位置是否可以通行,是否存在墙壁障碍物,确定各舱最优路径初始化列表。
9、进一步的,步骤s3具体包括:基于改进后的a*全局路径规划算法进行寻路,具体包括将起始点加入openstart记录坐标位置和方向,再将终点加入closed表中,进行路径回溯,选出代价最小的节点放入当前点,作为父节点。进行迭代,生成子节点并进行判断,对4个方位进行搜索,进行障碍物的判断,对每一个节点进行计算判断。
10、进一步的,步骤s4具体包括:将得到的路径进行优化计算,并进行路径评价,分别计算出路径长度lk,路径拐点转角的和sk,sk越小表明规划出的路径的平滑性约好。以及舱室模块转向间隔距离的安全裕度和dk,dk越小规划出的路径安全性越高。
11、进一步的,进行路径平滑性的计算,得到路径的拐点数k,路径在拐点处的转角αi,转角越大,表示舱室模块在拐点处的转弯幅度较小,以此来计算出路径的平滑性sk。
12、进一步的,进行转向间隔距离的安全裕度和dk的计算,计算出路径相邻拐点间的间距di,计算出舱室模块两次转向间距的安全阈值dthrehold,以此来得到转向间隔距离的安全裕度和。
13、进一步的,根据计算得到的路程长度lk,路径平滑性sk,转向间隔距离安全裕度和dk,根据公式f=w1lk+w2sk+w3dk计算得到路径评价函数的值。
14、一种改进a*算法的船舶移运路径优化及路径评价装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现所述的改进a*算法的船舶移运路径优化及路径评价方法。
15、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述改进a*算法的船舶移运路径优化及路径评价方法的步骤。
16、有益效果:本发明可以有效的解决装船过程中舱室移运路径的问题,为后续解决舱室移运路径优化提供一种新的思路。
技术特征:
1.一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,具体包括:
2.根据权利要求1所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,步骤s1具体包括:
3.根据权利要求1所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,所述步骤s2中,对栅格图进行预处理,确立路径搜索的四个主要方向,对墙壁障碍物坐标位置进行预处理,判断无法通行的位置,确定下一步的搜索位置。
4.根据权利要求1所述的一种改进a*算法的船舶移运路径优化及路径评价方,其特征在于,所述步骤s3中,在对栅格地图预处理的基础上,进行路径规划,本算法实例中对传统的a*算法进行了改进,使其在搜索过程中对前后左右四个方向进行搜索,符合船舶领域实际应用中的具体情况;
5.根据权利要求1所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,所述步骤s4中,使用路径评价方法对路径进行评价,在本实例中,路径评价函数如(1)式所示:
6.根据权利要求5所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,sk象征路径的平滑性,sk越小,表明规划路径的平滑性越好,sk的表达式如(2)式所示:
7.根据权利要求6所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,
8.根据权利要求7所述的一种改进a*算法的船舶移运路径优化及路径评价方法,其特征在于,所述的路径评价方法具体为:
9.一种改进a*算法的船舶移运路径优化及路径评价装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被加载至处理器时实现根据权利要求1-8任一项所述的改进a*算法的船舶移运路径优化及路径评价方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述改进a*算法的船舶移运路径优化及路径评价方法的步骤。
技术总结
本发明公开了一种改进A*算法的船舶舱室移运路径优化及路径评价方法,包括:S1,获取船舶舱室模块移运环境栅格图,进行障碍物与可通行区域的表示,并确定起始点;S2,对栅格图进行预处理,确立路径搜索主要方向,对墙壁障碍物进行预处理,确定下一步搜索位置;S3,对全局路径进行搜索,计算出最优路径;S4,使用路径评价方法对路径进行评价,计算出路径拐点数,转角大小,平滑性,拐点间距,安全阈值,安全裕度和最优长度,并根据评价函数计算出路径最终值。该方法可以有效地解决装船过程中舱室移运路径的问题,并对规划出的路径进行评价,符合实际施工情况,使舱室在最短时间内安全,无碰撞地通过所有障碍物移运到目标位置。
技术研发人员:刘昆,万鑫,邱伟健,俞同强,王加夏,路越
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!