具有在线数据传输和水下定位功能的智能海底地震仪
本发明涉及水声通信领域与海洋地震观测领域,尤其是涉及一种具有在线数据传输和水下定位功能的智能海底地震仪。
背景技术:
1、海底地震仪是一种放置于海底的地震数据采集系统,能够用于记录天然地震事件和地质剖面勘探(黎珠博,潘飞儒.海底地震观测技术现状与展望[j].华北地震科学,2015,33(03): 56-63)。由于仪器位于海底,可以同时接收p波和s波信号,且环境噪音低,能够实现高信噪比、高分辨率和高精度的海底地震数据采集,广泛应用于油气勘探、地球深部结构探测、天然地震预报等领域(郭磊,王程,杨秀卿,薛钢,孟元库,刘延俊.海底地震仪布放回收器及方法[p]. 山东省:cn112462429b,2022-03-25)。
2、现有海底地震仪采取“离线获取数据”的作业方式,科考人员在海面将与沉耦架连接的海底地震仪按计划点投放,在沉耦架的重力作用下海底地震仪在海水中自由下落至海底进行数据记录,持续数个月后(一般为三个月)由科考人员回收坐底的海底地震仪(孟肯.潜浮式深海地震仪的设计与研究[d].杭州电子科技大学,2021)。回收时科考人员在船上操作配套的甲板机,由甲板机发送声学指令,海底地震仪的水声换能器接收到声学释放指令后,对熔断钢丝进行电化学熔断,海底地震仪与沉耦架分离,海底地震仪利用自身的浮力漂浮至海面(董广,彭光荣,林裕锋. 一种海底地震仪装置及系统[p]. 广东省:cn215953874u, 2022-03-04)。
3、尽管以上作业方式进行数十年,但是呈现的几个较为棘手的问题一直未得到有效解决,首先,现有地震台网观测采取提前布放、离线数据分析的观测方式,在布放周期内,工作人员不仅无法获取观测数据,同时也无法知悉海底地震仪的工作状态,严重时可能使观测航次失去意义,浪费观测成本;其次,受洋流运动或海底地形的影响,传统海底地震仪坐底的实际位置与投放时海面记录的位置有偏差,观测位置不准确会降低后期数据处理时地质结构反演的性能;再次,现有海底地震仪的时钟依赖于本地晶振,长期工作后晶振会产生频率漂移和时间偏移,导致地震测线各个采集点的采集数据时间戳会有偏差,影响数据分析精度;最后,现有观测作业海底地震仪回收时候所需要的声学释放器还是依赖于国外进口,进口的声学释放器和对应的声学模块远远滞后于现有技术,但受制于设备非国产,在现有基础上进行产品的更新迭代并不容易。
技术实现思路
1、本发明的目的是针对传统海底地震仪不具备在线数据传输能力,投放作业时由于施工人员无法获取水下海底地震仪状态而造成投放失败等问题,提供一种具有在线数据传输和水下定位功能的智能海底地震仪(以下简称:智能海底地震仪),在传统海底地震仪的基础上增加智能声学模块,与传统的声学模块不同,智能声学模块不仅具有水声通信功能,能实现实在线数据传输,还集成智能水声定位功能,使智能海底地震仪具有状态回传、声学定位、声学释放功能,可以更好满足海洋科学研究与地震探测的需要。
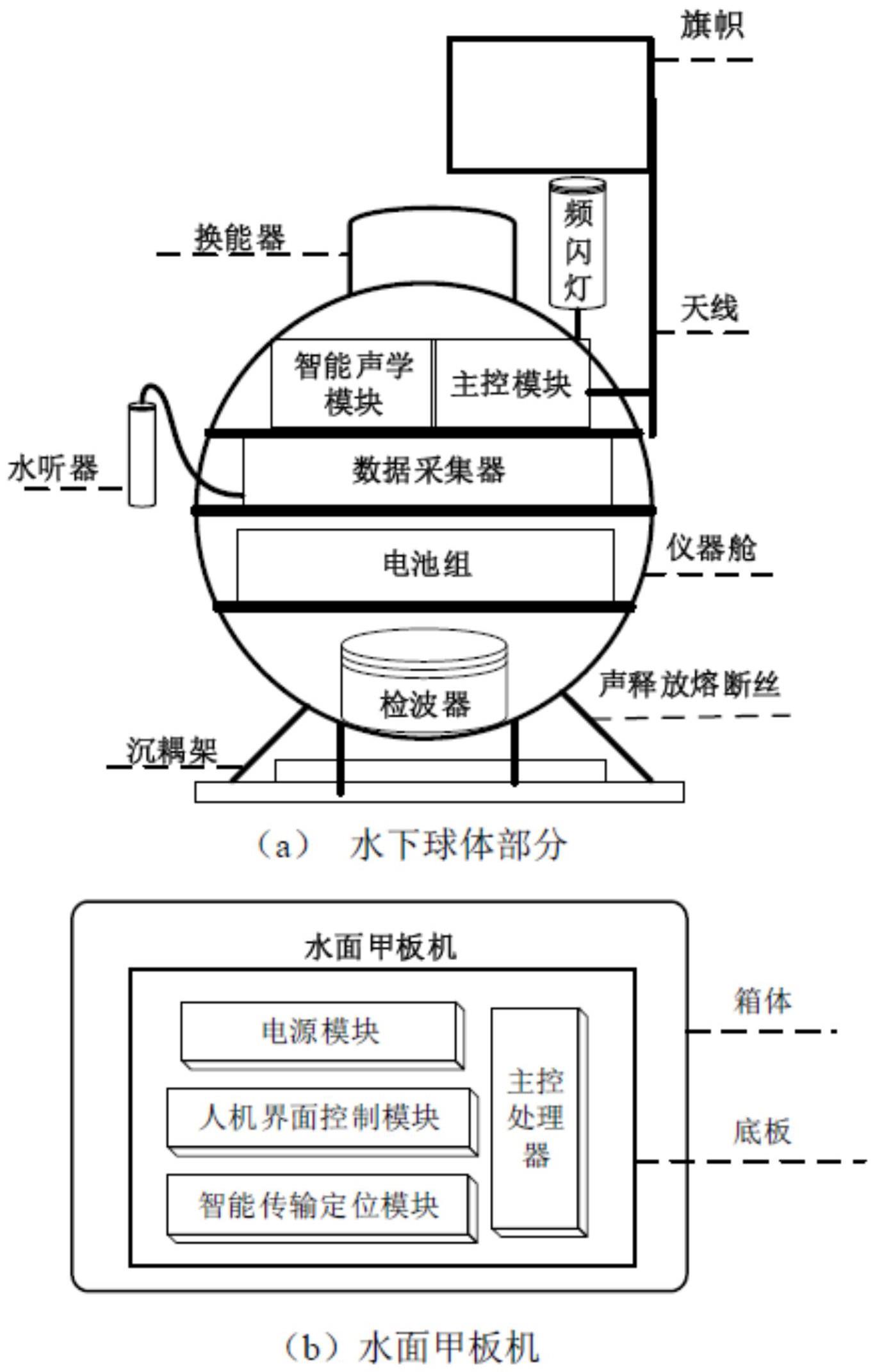
2、本发明包括水下球体部分和水面甲板机两部分,水下球体与水面甲板机之间通过水声通信的方式进行数据交互;
3、所述水下球体部分包括仪器舱和沉耦架;所述仪器舱内集成数据采集模块、智能声学模块、电池组、主控模块;
4、所述数据采集模块包括检波器、数据采集器、水听器、内部存储卡和通用串口ⅲ;所述检波器位于仪器舱内,用于将地震信号转换为可测量的电信号,检波器包括一个垂直方向分量和两个水平方向分量;所述数据采集器用于将检波器采集到的电信号滤波、放大、模数转换处理之后记录在内部存储卡上;所述水听器用于记录低频声信号;所述数据采集模块通过通用串口ⅲ控制信号与智能声学模块交互;数据采集模块采用通用串口ⅲ与主控模块交互信息;
5、所述智能声学模块包含信号预处理子模块ⅰ、智能调制解调子模块ⅰ、声信标、声发射子模块ⅰ和通用串口ⅱ;智能声学模块通过通用串口ⅱ读取数据采集模块的状态和特定时段的数据,并将这些状态回传至水面甲板机;所述信号预处理子模块ⅰ集成时间同步算法,用于定期对智能海底地震仪进行时钟校准;所述智能调制解调子模块ⅰ集成智能解调算法,用于实现水声信号的智能解调功能;所述声信标用于产生定位请求脉冲信号,并通过换能器向水面甲板机发射定位请求信号;所述声发射子模块ⅰ由功率放大电路、匹配电路和换能器构成;换能器位于仪器舱正上部,是水声信号发射和接收的重要部件;所述声发射子模块ⅰ用于将接收的水声信号经滤波后驱动功率放大电路,送入匹配电路,最后驱动换能器将电信号转换为声信号传输到水声信道中;
6、所述电池组用于为主控模块提供48v电源;
7、所述主控模块包括电源管理子模块ⅰ、系统控制子模块和通用串口ⅰ;所述主控模块从电池组获得48v电源,电源管理子模块ⅰ将48v电源降压为三路直流电源,分别为数据采集模块和智能声学模块供电;系统控制子模块利用通用串口ⅰ对智能声学模块进行休眠控制;所述主控模块外接频闪灯、旗帜、天线,所述频闪灯、旗帜和天线均设于仪器舱的右上方;频闪灯和旗帜分别用于在黑夜和白天有效指示仪器舱所在方位且方便回收;
8、所述水面甲板机放置在甲板上,包括箱体部分;所述箱体部分由底板、电源模块、人机界面控制模块、智能传输定位模块和主控处理器构成;所述底板配备多个电源接口和多个数据接口,电源模块通过底板的各个电源接口对人机界面控制模块、主控处理器和智能传输定位模块进行供电;所述人机界面控制模块用于方便查看智能海底地震仪的健康状态、监测到的实时数据,如地震波等;所述智能传输定位模块用于对水下球体部分的智能声学模块发送的水声信号进行调制解调,将经解调获得的信息在人机界面显示,以实现在线数据传输;所述主控处理器用于将智能传输定位模块去噪后的信号处理得到智能海底地震仪的位置,并将该位置显示在人机界面控制模块的人机界面中;所述人机界面控制模块、智能传输定位模块和主控处理器之间通过底板的数据接口实现数据交互。
9、所述仪器舱固定设于沉耦架之上,仪器舱与沉耦架之间采用声释放熔断丝固定;水面甲板机通过水声信道发送声释放指令,当水下球体部分的智能声学模块接收到水面甲板机发送的声释放指令后,控制声释放熔断丝熔断,仪器舱与沉耦架分离,仪器舱上浮至水面,沉耦架遗弃于海底。
10、进一步的,所述智能解调算法集成于智能调制解调子模块ⅰ,智能解调算法可基于神经网络设计,神经网络包括信道估计(channel estimation, ce)子网和信号检测(signal detection, sd)子网,ce子网的输入信号为基带频域信号yd,经过ce子网处理后得到线性最小均方误差(linear minimum mean squared, lmmse)估计值输出x lmmse d,并作为sd子网的其中一个输入端;sd子网同时接收基带频域信号yd作为输入,并输出解调信号x est d。
11、所述声信标可以通过接收外部声触发信号或者由内部高精度时钟同步触发,发射脉冲信号;当智能海底地震仪定位时,声信标产生定位请求脉冲信号,通过换能器向水面甲板机发射定位请求信号。
12、所述电源管理子模块ⅰ将48v电源降压为三路直流电源,分别12v、5v和3.3v,其中12v为数据采集模块供电,5v和3.3v为智能声学模块供电。
13、所述电池组可采用能量密度较高的18650工业锂电池组。
14、进一步的,所述人机界面控制模块包括人机界面模块、显示屏接口和spi接口ⅰ/usb接口/串口;人机界面控制模块由spi接口ⅰ/usb接口/串口接收智能传输定位模块的输出信号和主控处理模块的定位解算信息,将状态信息和定位信息显示在人机界面;显示屏接口可用于外部设备连接,方便外部设备与水面甲板机信息交互。
15、进一步的,所述智能传输定位模块包括模拟信号处理模块、信号预处理模块和智能声信号处理模块;
16、所述模拟信号处理模块包括换能器与水听器阵接口、信号预处理子模块ⅱ和声发射子模块ⅱ;智能海底地震仪发送的声信号由换能器与水听器阵接口接收,信号预处理子模块ⅱ对接收信号进行频带的放大和滤波;所述声发射子模块ⅱ与声发射子模块ⅰ结构相同,由功率放大电路、匹配电路和换能器构成;水面甲板机向智能海底地震仪发送信号,信号经滤波后驱动功率放大电路,而后送入匹配电路,最后驱动换能器,将电信号转换为声信号传输到水声信道中。
17、所述信号预处理模块包括信号预处理子模块ⅲ、模数转换子模块和spi接口ⅲ;信号预处理模块用于接收模拟信号处理模块的输出信号,由信号预处理子模块ⅲ预处理、模数转换子模块将模拟信号转换成数字信号,通过spi接口ⅲ输出,由智能声信号处理模块接收。
18、所述智能声信号处理模块包括智能调制解调子模块ⅱ、智能测距子模块和spi接口ⅳ;智能声信号处理模块与其他模块通过spi接口ⅳ实现信息交互;
19、所述智能调制解调子模块ⅱ集成智能解调算法,该算法与智能调制解调子模块ⅰ集成的智能解调算法相同,采用基于深度学习的方法对信号预处理模块的输出信号智能解调;
20、所述智能测距子模块集成智能去噪算法,使用基于深度学习的方法对智能调制解调子模块ⅱ的输出信号盲去噪处理;所述智能去噪算法基于神经网络的设计,神经网络包括噪声特征提取子网和噪声去除子网;噪声特征提取子网的输入信号为智能调制解调子模块ⅱ的输出信号,经噪声特征提取子网处理后得到输入信号的噪声,并作为噪声去除子网的一个输入端;噪声去除子网同时接收智能调制解调子模块ⅱ的输出信号作为输入,并输出去噪后的信号。
21、进一步的,所述主控处理器包括电源管理子模块ⅱ、定位解算子模块和spi接口ⅱ;电源管理子模块ⅱ用于实现对各个模块电量的分配和控制;定位解算子模块集成加权最小二乘法定位解算方法,用于处理由智能测距子模块去除噪声后的信号,从而获得智能海底地震仪的位置;
22、进一步的,所述电源模块包括外部直流电源和内部电池组,可以使用两种方式对各个模块供电,智能海底地震仪位于海底时,一般采用内部电池组供电;
23、所述人机界面控制模块包括人机界面、显示屏接口和spi接口ⅰ/usb接口/串口;人机界面控制模块用于方便查看智能海底地震仪的健康状态、监测到的实时数据,如地震波等。
24、所述智能传输定位模块由模拟信号处理模块、信号预处理模块和智能声信号处理模块构成;
25、所述模拟信号处理模块包括换能器与水听器阵接口、信号预处理子模块ⅱ和声发射子模块ⅱ;智能海底地震仪发送的声信号由换能器与水听器阵接口接收,信号预处理子模块ⅱ对接收信号进行频带的放大和滤波;
26、所述声发射子模块ⅱ由功率放大电路、匹配电路和换能器构成;水面甲板机向智能海底地震仪发送信号,信号经滤波后驱动功率放大电路,而后送入匹配电路,最后驱动换能器,将电信号转换为声信号传输到水声信道中。
27、所述信号预处理模块包括信号预处理子模块ⅲ、模数转换子模块和spi接口ⅲ;信号预处理模块接收模拟信号处理模块的输出信号,由信号预处理子模块ⅲ预处理、模数转换子模块将模拟信号转换成数字信号,通过spi接口ⅲ输出,由智能声信号处理模块接收。
28、所述智能声信号处理模块包括智能调制解调子模块ⅱ、智能测距子模块和spi接口ⅳ;智能声信号处理模块与其他模块通过spi接口ⅳ实现信息交互。
29、所述智能调制解调子模块ⅱ集成智能解调算法,采用基于深度学习的方法对信号预处理模块的输出信号智能解调;
30、所述智能解调算法基于神经网络设计,神经网络包括信道估计(channelestimation, ce)子网和信号检测(signal detection, sd)子网,ce子网的输入信号为基带频域信号yd,经过ce子网处理后得到线性最小均方误差(linear minimum meansquared, lmmse)估计值输出x lmmse d,并作为sd子网的其中一个输入端;sd子网同时接收基带频域信号yd作为输入,并输出解调信号x est d。
31、所述智能测距子模块集成智能去噪算法,使用基于深度学习的方法对智能调制解调子模块ⅱ的输出信号盲去噪处理。
32、所述智能去噪算法基于神经网络的设计,神经网络包括噪声特征提取子网和噪声去除子网。噪声特征提取子网的输入信号为智能调制解调子模块ⅱ的输出信号,经噪声特征提取子网处理后得到输入信号的噪声,并作为噪声去除子网的一个输入端;噪声去除子网同时接收智能调制解调子模块ⅱ的输出信号作为输入,并输出去噪后的信号。
33、所述主控处理器包括电源管理子模块ⅱ、定位解算子模块和spi接口ⅱ。电源管理子模块ⅱ用于实现对各个模块电量的分配和控制;定位解算子模块集成加权最小二乘法定位解算方法,用于处理由智能测距子模块去除噪声后的信号,从而获得智能海底地震仪的位置;主控处理器由spi接口ⅱ接收智能声信号处理模块的输出信号,定位解算子模块利用解算算法进行定位解算。
34、所述沉耦架采用表面附着防锈漆的钢铁材料制成,为智能海底地震仪在海底工作提供稳定可靠的底座。
35、本发明具有在线数据传输功能、智能声学定位功能、在线时间同步功能和海底释放功能。
36、1、在线数据传输功能:智能海底地震仪的数据采集模块采集地震波数据,经过智能声学模块的调制解调,通过声发射子模块ⅰ向水面甲板机发送信号,水面甲板机的智能传输定位模块对该信号进行调制解调,将经解调获得的信息在人机界面显示,实现在线数据传输。
37、2、声学定位功能:智能海底地震仪智能的声学信标通过声发射子模块ⅰ向水面甲板机发射定位请求信号,水面甲板接收定位请求信号,智能传输定位模块的调制解调子模块ⅱ对该信号解调,解调后的信号进入智能测距子模块,使用智能去噪算法实现信号的盲去噪,去噪后的信号由主控处理器中定位解算子模块解算智能海底地震仪的位置,将该位置显示在人机界面。
38、3、在线时间同步功能:智能海底地震仪的信号预处理子模块ⅰ集成时间同步算法,用于定期对智能海底地震仪进行时钟校准。
39、4、海底释放功能:水面甲板机发送的声释放指令通过水声信道到达智能海底地震仪,智能声学模块接收到该声释放指令,控制声释放熔断丝熔断,仪器舱和沉耦架分离,仪器舱上浮至水面。
40、与现有技术相比,本发明具有以下突出的优点:
41、1、本发明提出智能解调算法,基于神经网络设计信道估计(ce)和信号检测(sd)子网,通过级联子网的设计,在时间效益上,采用ce子网初步估算信道信息,加快整个网络的收敛速度,解决模型训练时间冗长的问题。在性能效益上,sd子网包含bilstm网络,能够利用接收序列的前后文信息不断修正当前时间步的输出,解决水下子载波间干扰的问题。智能解调算法针对复杂的水下环境,利用深度学习替代传统的通信模块,在有效性和可靠性上有巨大优势。
42、2、本发明提出智能去噪算法,基于神经网络设计噪声特征提取子网和噪声去除子网。在训练阶段,可通过采集的大量定位信号以数据驱动方式训练噪声特征子网学习提取接收信号内蕴含的噪声干扰及其他形式的隐式干扰特征,之后再将提取到的噪声特征及接收信号一并送入噪声去除子网中进一步分离噪声与信号,提取出去噪信号并输出。不仅使智能测距子模块不需要任何先验信息就能完成智能调制解调子模块ⅱ输出信号的盲去噪,而且还有强大拟合能力,足以处理复杂特征;具有对复杂海洋环境干扰的特征提取及去除能力,显著提升系统的测距定位性能。
43、3、本发明在水下由电池组供电,能够长时间地工作于水下环境,保证智能海底地震仪够在海底长期、连续进行地震波信号的采集、实时传输,以及回收智能海底地震仪时能够准确获取其所在位置,提高回收率。
- 还没有人留言评论。精彩留言会获得点赞!