一种无缓冲滑动机械位置检测方法、定位方法及系统
本发明属于计量检测,特别是涉及一种无缓冲滑动机械位置检测方法、定位方法及系统。
背景技术:
1、在许多工业制造和自动化控制的应用中,精确检测和控制滑动机械的位置是至关重要的。这可以确保机械运动的精度和重复性,从而提高产品质量和生产效率。
2、传统的滑动机械位置检测方法通常依赖于物理传感器或编码器,这些设备会被安装在机械的关键位置以检测其运动状态。然而受限于成本,高精度的传感器和编码器难以得到广泛应用,但是低精度的传感器和编码器又难以完成精度较高的测量,因此现有技术中通常是降低物体的速度后再进行检测,但是这种方法无法应用于工作过程中的工件位置检测。
技术实现思路
1、本发明的目的在于提供一种无缓冲滑动机械位置检测方法、定位方法及系统,通过对运动中的目标物体进行多次检测的方式,提高了物体位置检测精度。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明提供一种无缓冲滑动机械位置检测方法,包括,
4、获取设定停止点;
5、逆目标物体的运动方向获取检测窗口区域;
6、在所述检测窗口区域设置多个检测点;
7、获取每个所述检测点的位置;
8、在多个所述检测点依次分别检测所述目标物体的通过时刻;
9、根据所述检测点的位置和所述目标物体的对应通过时刻获取所述检测点对应的停止检测位置;
10、根据每个所述检测点的位置对应的停止检测位置计算得到所述目标物体的停止位置。
11、本发明还公开了一种定位方法,包括,
12、接收所述一种无缓冲滑动机械位置检测方法中的所述目标物体的停止位置;
13、根据设定停止点和所述目标物体的停止位置对所述目标物体的位置进行校正。
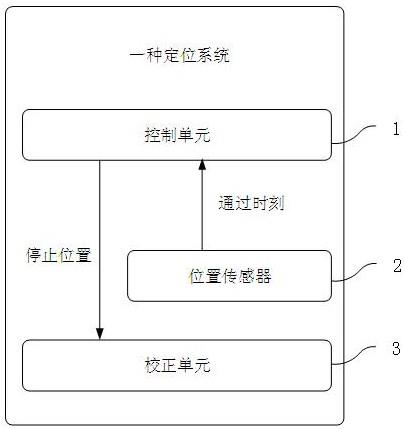
14、本发明还公开了一种定位系统,包括,
15、控制单元,用于获取设定停止点;
16、逆目标物体的运动方向获取检测窗口区域;
17、在所述检测窗口区域设置多个检测点;
18、获取每个所述检测点的位置;
19、若干个位置传感器,用于在多个所述检测点依次分别检测所述目标物体的通过时刻;
20、控制单元,还用于根据所述检测点的位置和所述目标物体的对应通过时刻获取所述检测点对应的停止检测位置;
21、根据每个所述检测点的位置对应的停止检测位置计算得到所述目标物体的停止位置;
22、校正单元,用于接收所述目标物体的停止位置;
23、根据设定停止点和所述目标物体的停止位置对所述目标物体的位置进行校正。
24、本发明通过多次检测运动中的目标物体,提高了物体位置检测的准确性。首先由控制单元获取设定的停止点,并通过逆向目标物体的运动方向获取检测窗口区域,在检测窗口区域内设置多个检测点,并获取它们的位置。多个位置传感器按顺序在这些检测点上检测目标物体的通过时刻,控制单元还用于根据检测点的位置和目标物体通过时刻确定相应的停止检测位置。之后根据每个检测点的位置和停止检测位置计算目标物体的停止位置。最后由校正单元接收目标物体的停止位置,并根据设定的停止点和目标物体的停止位置对其位置进行校正。通过以上方式,本发明能够显著提高物体位置检测和定位的精度。
25、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种无缓冲滑动机械位置检测方法,其特征在于,包括,
2.根据权利要求1所述的方法,其特征在于,所述逆目标物体的运动方向获取检测窗口区域的步骤,包括,
3.根据权利要求2所述的方法,其特征在于,所述根据所述检测精度和所述定位精度得到所述检测窗口区域的末段的检测点的数量的步骤,包括,
4.根据权利要求2所述的方法,其特征在于,所述根据所述检测点的最小间距、所述检测窗口区域的末段以及所述检测窗口区域的首段的检测点的数量得到所述检测窗口区域的首段的步骤,包括,
5.根据权利要求4所述的方法,其特征在于,所述在所述检测窗口区域设置多个检测点的步骤,包括,
6.根据权利要求2所述的方法,其特征在于,所述根据所述检测点的位置和所述目标物体的对应通过时刻获取所述检测点对应的停止检测位置的步骤,包括,
7.根据权利要求6所述的方法,其特征在于,所述剔除所述目标物体通过所述检测窗口区域的尾端的所述检测点的通过速度中的异常值的步骤,包括,
8.根据权利要求6所述的方法,其特征在于,所述根据每个所述检测点的位置对应的停止检测位置计算得到所述目标物体的停止位置的步骤,包括,
9.一种定位方法,其特征在于,包括,
10.一种定位系统,其特征在于,包括,
技术总结
本发明公开一种无缓冲滑动机械位置检测方法、定位方法及系统,涉及计量检测技术领域。本发明包括,控制单元,用于获取设定停止点;逆目标物体的运动方向获取检测窗口区域;在检测窗口区域设置多个检测点;获取每个检测点的位置;若干个位置传感器,用于在多个检测点依次分别检测目标物体的通过时刻;控制单元,还用于根据检测点的位置和目标物体的对应通过时刻获取检测点对应的停止检测位置;根据每个检测点的位置对应的停止检测位置计算得到目标物体的停止位置;校正单元,用于接收目标物体的停止位置;根据设定停止点和目标物体的停止位置对目标物体的位置进行校正。本发明提高了物体位置检测精度。
技术研发人员:赵鹤伟
受保护的技术使用者:河南职业技术学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!