路端多感知设备的标定方法、装置及电子设备与流程
本发明涉及智慧交通,特别涉及路端多感知设备的标定方法、装置及电子设备。
背景技术:
1、在多传感器融合的各种算法中标定发挥重要作用,但是在路端场景的标定与车端场景的标定相差甚远,很多车端的标定方法并不适用于路端。例如,车端的雷达和相机由于高度一般在2m以下,标定是可以在车附近1-2m内完成,使用标定板能够较为精准、快速的完成标定。然而,在路端雷达和相机的安装高度一般都在6-7m,由于道路、车辆、检测范围等因素需要进行标定的位置距离在20-100m,标定板尺寸和成本非常高,几乎不适用于路端。
2、现有的路端雷达与相机之间的标定,通常使用特殊的关键点完成,分别在点云和图像中去寻找如地面箭头、路边交通指示牌的角点、特殊的建筑物的角点、边线等,将其进行配对后进行标定。这种标定方法受环境因素的影响非常的大,一方面特殊的关键点匮乏,另一方面,关键点分布不均,会导致标定的精度非常低,无法满足路端的标定需求。
技术实现思路
1、本发明实施例提供一种路端多感知设备的标定方法、装置及电子设备,用于解决现有技术中路端多感知设备标定精度低的技术问题。
2、第一方面,本申请实施例提供一种路端多感知设备的标定方法,包括:
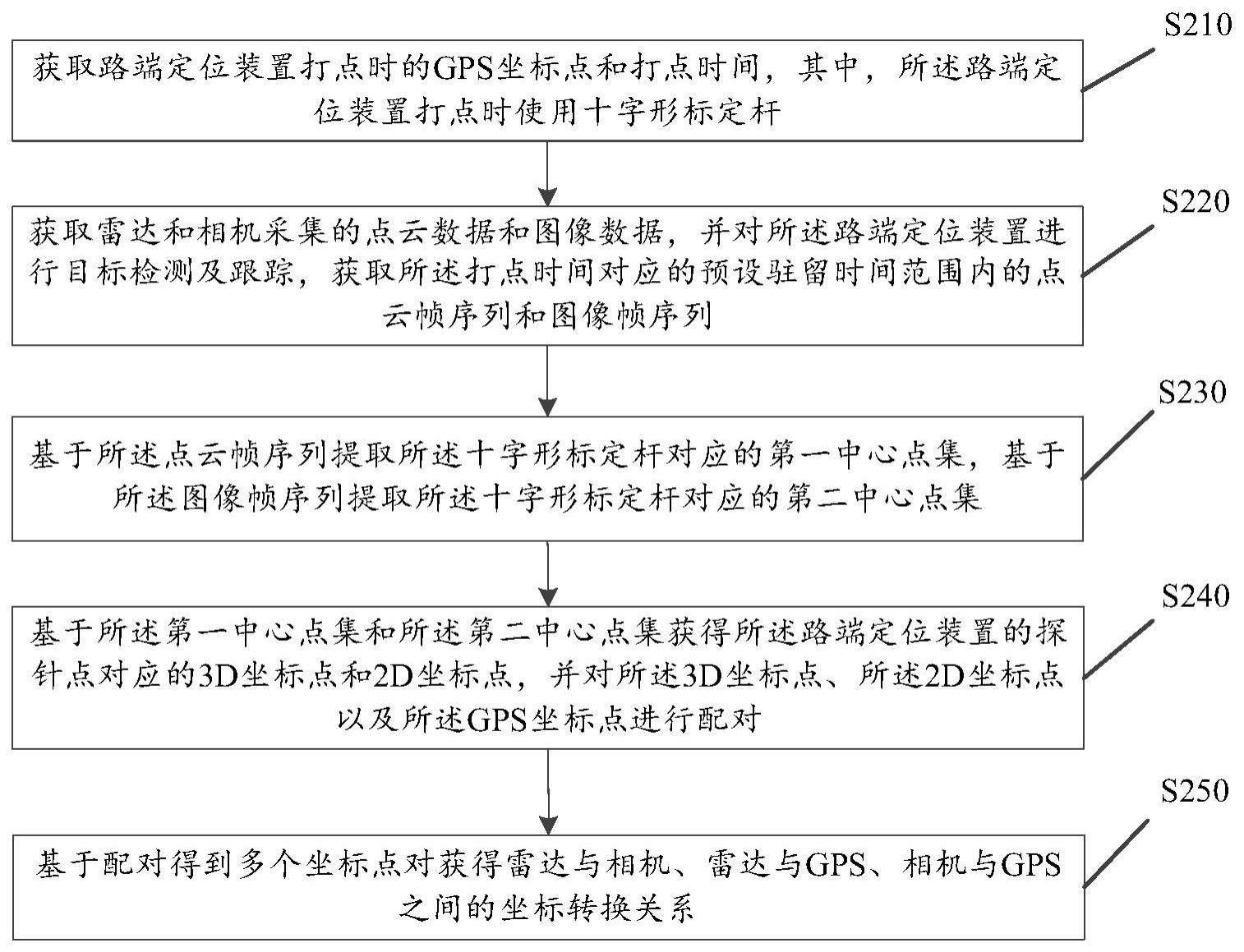
3、获取路端定位装置打点时的gps坐标点和打点时间,其中,所述路端定位装置打点时使用十字形标定杆;
4、获取雷达和相机采集的点云数据和图像数据,并对所述路端定位装置进行目标检测及跟踪,获取所述打点时间对应的预设驻留时间范围内的点云帧序列和图像帧序列;
5、基于所述点云帧序列提取所述十字形标定杆对应的第一中心点集,基于所述图像帧序列提取所述十字形标定杆对应的第二中心点集;
6、基于所述第一中心点集和所述第二中心点集获得所述路端定位装置的探针点对应的3d坐标点和2d坐标点,并对所述3d坐标点、所述2d坐标点以及所述gps坐标点进行配对;
7、基于配对得到多个坐标点对获得雷达与相机、雷达与gps、相机与gps之间的坐标转换关系。
8、可选的,所述十字形标定杆包括:对中杆和横杆,所述对中杆和所述横杆上涂有反光涂料,打点时所述对中杆与rtk接收器相连、所述对中杆与所述横杆形成十字形状。
9、可选的,所述基于所述第一中心点集和所述第二中心点集获得所述路端定位装置的探针点对应的3d坐标点和2d坐标点,包括:
10、分别对所述第一中心点集和所述第二中心点集进行聚类获得第一目标点和第二目标点;
11、基于所述十字形标定杆的中心点与所述探针点之间的位置关系,对所述第一目标点和所述第二坐标点进行转换,获得所述探针点对应的3d坐标点和2d坐标点。
12、可选的,基于所述点云帧序列提取所述十字形标定杆对应的第一中心点集,基于所述图像帧序列提取所述十字形标定杆对应的第二中心点集,包括:
13、对所述点云帧序列中的每帧点云进行目标识别,获得所述标定杆的点云;对所述标定杆的点云进行线性拟合,获得第一直线和第二直线;获取所述第一直线和所述第二直线的交点作为第一中心点;
14、对所述图像帧序列中的每帧图像进行图像识别,获得所述标定杆的对中杆与横杆的交点作为第二中心点。
15、可选的,在所述对所述标定杆的点云进行线性拟合之前,所述方法还包括:
16、基于点云的反射强度对所述标定杆的点云进行去噪,获取点云帧中任一区域的点云反射强度的最大值rmax,保留反射强度高于√2/2*rmax的点。
17、第二方面,本申请实施例提供一种路端多感知设备的标定装置,所述装置包括:
18、获取单元,用于获取路端定位装置打点时的gps坐标点和打点时间,其中,所述路端定位装置打点时使用十字形标定杆;
19、跟踪单元,用于获取雷达和相机采集的点云帧和图像帧,并对所述路端定位装置进行目标检测及跟踪,获取所述打点时间对应的预设驻留时间范围内的点云帧序列和图像帧序列;
20、提取单元,用于基于所述点云帧序列提取所述十字形标定杆对应的第一中心点集,基于所述图像帧序列提取所述十字形标定杆对应的第二中心点集;
21、配对单元,用于基于所述第一中心点集和所述第二中心点集获得所述路端定位装置的探针点对应的3d坐标点和2d坐标点,并对所述3d坐标点、所述2d坐标点以及所述gps坐标点进行配对;
22、标定单元,用于基于配对得到多个坐标点对获得雷达与相机、雷达与gps、相机与gps之间的坐标转换关系。
23、可选的,所述十字形标定杆包括:对中杆和横杆,所述对中杆和所述横杆上涂有反光涂料,打点时所述对中杆与rtk接收器相连、所述对中杆与所述横杆形成十字形状。
24、可选的,所述配对单元还用于:
25、分别对所述第一中心点集和所述第二中心点集进行聚类获得第一目标点和第二目标点;
26、基于所述十字形标定杆的中心点与所述探针点之间的位置关系,对所述第一目标点和所述第二坐标点进行转换,获得所述探针点对应的3d坐标点和2d坐标点。
27、第三方面,本申请实施例提供一种电子设备,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如第一方面所述的任一方法。
28、第四方面,本申请实施例提供一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如第一方面所述的任一方法。
29、本申请实施例中的上述一个或多个技术方案,至少具有如下技术效果:
30、本申请实施例提供一种路端多感知设备的标定方法,使用改进的路端定位装置,通过十字形标定杆的中心点作为关键点进行打点检测,打点时通过目标检测及跟踪获取驻留时间范围内的点云帧序列和图像序列,即在同一个打点位置获得多帧点云和图像,获得多帧点云和图像中标定杆对应的中心点集,基于该点集来确定打点所需的探针点,从而提高了探针点检测的准确性,基于此进行雷达、相机、gps多感知设备的标定,进而提高了多感知设备的标定精度,解决了现有技术中路端多感知设备标定精度低的技术问题。与此同时,本方案改进的路端定位装置采用十字形标定杆,不仅成本低、灵活性强、便于携带,还能增加点云检出率,使得路端打点便捷、可打点位置更多、打点区域可集中在目标区域而不是路边,进一步提升了路端标定的精度。
技术特征:
1.一种路端多感知设备的标定方法,其特征在于,所述方法包括:
2.如权利要求1所述的标定方法,其特征在于,所述十字形标定杆包括:对中杆和横杆,所述对中杆和所述横杆上涂有反光涂料,打点时所述对中杆与rtk接收器相连、所述对中杆与所述横杆形成十字形状。
3.如权利要求1所述的标定方法,其特征在于,所述基于所述第一中心点集和所述第二中心点集获得所述路端定位装置的探针点对应的3d坐标点和2d坐标点,包括:
4.如权利要求3所述的标定方法,其特征在于,基于所述点云帧序列提取所述十字形标定杆对应的第一中心点集,基于所述图像帧序列提取所述十字形标定杆对应的第二中心点集,包括:
5.如权利要求4所述的标定方法,其特征在于,在所述对所述标定杆的点云进行线性拟合之前,所述方法还包括:
6.一种路端多感知设备的标定装置,其特征在于,所述装置包括:
7.如权利要求6所述的标定装置,其特征在于,所述十字形标定杆包括:对中杆和横杆,所述对中杆和所述横杆上涂有反光涂料,打点时所述对中杆与rtk接收器相连、所述对中杆与所述横杆形成十字形状。
8.如权利要求6所述的标定装置,其特征在于,所述配对单元还用于:
9.一种电子设备,其特征在于,包括有存储器,以及一个或者一个以上的程序,其中一个或者一个以上的程序存储于存储器中,且经配置由一个或者一个以上处理器执行所述一个或者一个以上的程序实现如权利要求1-5任一所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-5任一所述的方法。
技术总结
本发明公开了一种路端多感知设备的标定方法、装置及电子设备。该标定方法包括:获取路端定位装置打点时的GPS坐标点和打点时间,路端定位装置打点时使用十字形标定杆;获取雷达和相机采集的点云数据和图像数据,并对路端定位装置进行目标检测及跟踪,获取打点时间对应的预设驻留时间范围内的点云帧序列和图像帧序列;基于点云帧序列和图像帧序列提取十字形标定杆对应的第一中心点集和第二中心点集,并基于此获得路端定位装置的探针点对应的3D坐标点和2D坐标点,并对3D坐标点、2D坐标点以及GPS坐标点进行配对;基于配对得到多个坐标点对进行标定。通过上述技术方案解决了现有技术中路端多感知设备标定精度低的技术问题。
技术研发人员:王俊权
受保护的技术使用者:苏州艾氪英诺机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!