车载组合导航初始化方法、控制单元及存储介质与流程
本发明涉及汽车,具体而言,涉及一种车载组合导航初始化方法、控制单元及存储介质。
背景技术:
1、车载组合导航初始化,即为确定组合导航系统定位信息的初始值的过程,上述定位信息包括经纬高、北东地速度、三个姿态角(横滚、俯仰、航向)。目前车载组合导航常用初始化方法是使用gnss定位信息进行初始化,首先利用imu传感器的加速度值初始化横滚角和俯仰角这两个姿态角,将车辆开到空旷场景,使gnss定位信息达到一定精度,然后使用gnss定位信息进行初始化,即完成了整个初始化。
2、组合导航系统要需要在初始化后才能进行导航定位,现有技术需要在存在gnss信号且gnss定位精度较好的场景下,才可以进行初始化,在车辆启动后到gnss定位精度达到可以初始化之前,会有地库、遮挡等gnss定位精度较差的场景路段,这段路程由于无法进行初始化而不能进行导航定位,降低了导航定位的实用性。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种车载组合导航初始化方法、控制单元及存储介质,以提高车载组合导航定位的实用性。
2、为了实现上述目的,本发明实施例采用的技术方案如下:
3、第一方面,本发明实施例提供一种车载导航初始化方法,应用于组合导航设备的控制单元,所述组合导航设备还包括imu传感器和gnss定位模块,所述控制单元与所述imu传感器和gnss定位模块通信连接;所述控制单元存储有待初始化车辆的历史定位信息;
4、所述方法包括:
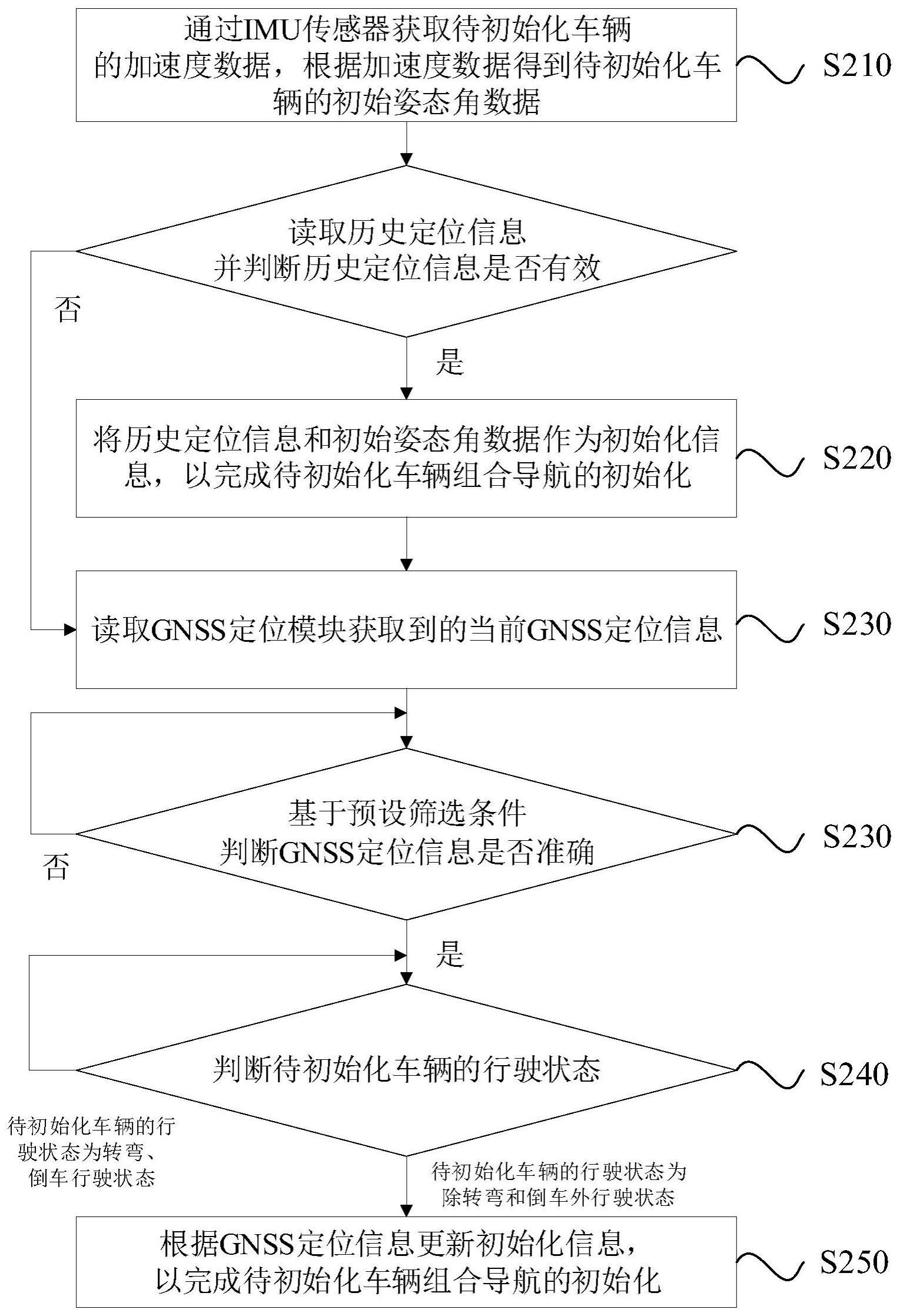
5、通过所述imu传感器获取待初始化车辆的加速度数据,根据所述加速度数据得到待初始化车辆的初始姿态角数据;
6、读取所述历史定位信息并判断所述历史定位信息是否有效,在所述历史定位信息有效的情况下,将所述历史定位信息和初始姿态角数据作为初始化信息,以完成待初始化车辆组合导航的初始化;
7、读取所述gnss定位模块获取到的当前gnss定位信息,基于预设筛选条件判断所述gnss定位信息是否准确;
8、在所述gnss定位信息准确的情况下,判断待初始化车辆的行驶状态;
9、在待初始化车辆的行驶状态为除转弯和倒车外行驶状态的情况下,根据所述gnss定位信息更新所述初始化信息,以完成待初始化车辆组合导航的初始化。
10、在可选的实施方式中,所述加速度数据包括待初始化车辆在x、y、z方向的加速度数据,所述通过所述imu传感器获取待初始化车辆的加速度数据,根据所述加速度数据得到待初始化车辆的初始姿态角数据的步骤,包括:
11、通过所述imu传感器获取待初始化车辆在x、y、z方向的加速度数据,根据所述待初始化车辆在x、y、z方向的加速度数据得到待初始化车辆的横滚角数据和俯仰角数据;
12、将所述横滚角数据和俯仰角数据作为待初始化车辆的初始姿态角数据。
13、在可选的实施方式中,所述历史定位信息对应有历史定位信息有效标志位,所述读取所述历史定位信息并判断所述历史定位信息是否有效的步骤,包括:
14、读取所述历史定位信息;
15、获取所述历史定位信息对应的历史定位信息有效标志位;
16、判断所述历史定位信息有效标志位的值是否为预设第一标记值,所述预设第一标记值不等于0;
17、若是,判定所述历史定位信息有效;
18、若否,判定所述历史定位信息无效。
19、在可选的实施方式中,所述历史定位信息包括第一经纬高数据和第一航向数据;
20、所述在所述历史定位信息有效的情况下,将所述历史定位信息和初始姿态角数据作为初始化信息,以完成待初始化车辆历史位置初始化的步骤,包括:
21、在所述历史定位信息有效的情况下,将所述第一经纬高数据、第一航向数据和初始姿态角数据作为初始化信息;
22、将待初始化车辆的当前速度初始化为0;
23、将所述历史定位信息对应的历史定位信息有效标志位的值更新为0,以完成待初始化车辆历史位置初始化。
24、在可选的实施方式中,所述方法还包括:
25、在所述历史定位信息无效的情况下,读取所述gnss定位模块获取到的当前gnss定位信息,基于预设筛选条件判断所述gnss定位信息是否准确;
26、在所述gnss定位信息准确的情况下,判断待初始化车辆的行驶状态;
27、在待初始化车辆的行驶状态为除转弯和倒车外行驶状态的情况下,根据所述gnss定位信息更新所述初始化信息,以完成待初始化车辆组合导航的初始化。
28、在可选的实施方式中,所述gnss定位信息包括gnss定位解状态、卫星数和gnss速度,所述基于预设筛选条件判断所述gnss定位信息是否准确的步骤,包括:
29、判断gnss定位解状态是否为固定解;
30、在所述gnss定位解状态为固定解的情况下,判断所述卫星数是否大于预设卫星数;
31、在所述卫星数大于所述预设卫星数的情况下,判断所述gnss速度是否大于预设gnss速度;
32、在所述gnss速度大于所述预设gnss速度的情况下,判定所述gnss定位信息准确;
33、在所述gnss定位解状态为非固定解的情况下,或在所述卫星数小于等于所述预设卫星数的情况下,或在所述gnss速度小于等于所述预设gnss速度的情况下,判定所述gnss定位信息不准确。
34、在可选的实施方式中,所述gnss定位信息还包括第二经纬高数据、北东地速度数据和第二航向数据,所述初始化信息对应有初始化标记;
35、所述在待初始化车辆的行驶状态为除转弯和倒车外行驶状态的情况下,根据所述gnss定位信息更新所述初始化信息,以完成待初始化车辆组合导航的初始化的步骤,包括:
36、在待初始化车辆的行驶状态为除转弯和倒车外行驶状态的情况下,将所述第二经纬高数据、北东地速度数据、第二航向数据和初始姿态角数据作为初始化信息;
37、将初始化标记的值更新为预设第二标记值,以完成待初始化车辆组合导航的初始化,所述预设第二标记值不等于0。
38、在可选的实施方式中,所述方法还包括:
39、在接收到断电指令的情况下,判断所述初始化标记的值是否为所述预设第二标记值,以判断待初始化车辆组合导航是否完成初始化;
40、若是,将所述初始化信息存储,并将所述历史定位信息对应的历史定位信息有效标志位的值更新为所述预设第一标记值;
41、若否,则基于所述断电指令控制所述组合导航设备进入休眠状态。
42、第二方面,本发明实施例提供一种控制单元,包括存储器和处理器;
43、所述存储器用于存储计算机程序;
44、所述处理器用于执行所述计算机程序,以实现如上述第一方面实施例和/或结合上述第一方面实施例可能的实施方式提供的车载组合导航初始化方法。
45、第三方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述第一方面实施例和/或结合上述第一方面实施例可能的实施方式提供的车载组合导航初始化方法。
46、本发明实施例的有益效果包括,例如:
47、本发明实施例提供的一种车载组合导航初始化方法、控制单元及存储介质,通过使用有效的历史定位信息,以及使用根据待初始化车辆的加速度数据得到的待初始化车辆的初始姿态角数据进行初始化,在车辆启动后,就可以导航定位,解决了车辆在地库等场景启动后由于地库、遮挡等gnss定位精度较差没有导航定位的问题,提高了车载组合导航定位的实用性。
48、进一步地,还可以基于gnss定位模块获取到的当前gnss定位信息进行待初始化车辆组合导航的二次初始化,即基于预设筛选条件判断出gnss定位信息准确,以及在待初始化车辆的行驶状态为除转弯和倒车外行驶状态的情况下进行待初始化车辆组合导航的二次初始化,使完成的待初始化车辆组合导航的初始化更为精确。
49、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!