一种改进A*融合DWA算法的移动机器人路径规划方法
本发明涉及移动机器人路径规划领域,具体涉及一种改进a*融合dwa算法的移动机器人路径规划方法。
背景技术:
1、移动机器人路径规划是移动机器人研究领域的重要课题之一,其目的是在复杂的环境中避开障碍物,按照最优的路径从起点安全抵达终点。路径规划技术也是移动机器人自主导航技术的核心组成部分,国内外学者针对这一课题提出了各种路径规划方法。
2、路径规划分为全局路径规划和局部路径规划。
3、全局路径规划目前应用最为广泛的规划算法为a*算法,a*算法是一种启发算法,就是根据启发式有目标的寻找终点,并且在基于最小成本的情况下,能够找到全局最优路径。但是传统a*算法存在路径无用节点和拐点过多的情况,有学者利用删除中间节点和冗余拐点的方法来减少a*算法规划路径的拐点数量,但是会导致路径更加靠近障碍物,路径安全性降低。有学者通过在启发式中添加安全威胁代价来保证规划路径的安全性,但是这样会造成路线长度和转折点的增加。有学者通过改变节点拓展方向将a*算法邻域扩展到无限个,减少了路径的拐点数量但计算量显著增加,搜索效率明显降低。
4、目前局部路径规划算法中dwa算法表现出较好的局部避障能力。王永雄等对dwa算法进行了参数自适应优化,使dwa算法能够获得最佳速度,且保证了安全性。mai等提出了一种能够提前感知密集物体分布情况的改进dwa算法,可以使机器人稳定地避开密集区域。但是dwa无法找到全局最优路径。
5、以上研究均只考虑了全局路径规划中如何更好获得最优路径,以及局部路径规划中如何更好获得局部路径。但是,移动机器人如何沿全局最优路径运行的过程中兼顾实时避障一直是移动机器人路径规划和移动机器人导航领域需要解决的问题。
技术实现思路
1、本发明针对上述问题,为实现移动机器人沿全局最优路径运行的过程中兼顾实时避障,提出了一种改进a*融合dwa算法的移动机器人路径规划方法。该方法利用a*算法进行路径规划,得到初始路径,将初始路径利用折叠优化算法进行二次优化得到优化路径;最后,将优化路径节点输入到dwa算法作为中间目标点,使dwa算法规划路径遵循优化路径。本发明采用的改进a*融合dwa算法,优化了传统a*算法的路径节点,减少了拐点数量,能够实时避障,保证了移动机器人在复杂环境中的适应能力。
2、本发明采取的技术方案为:一种改进a*融合dwa算法的移动机器人路径规划方法,具体包括以下步骤:
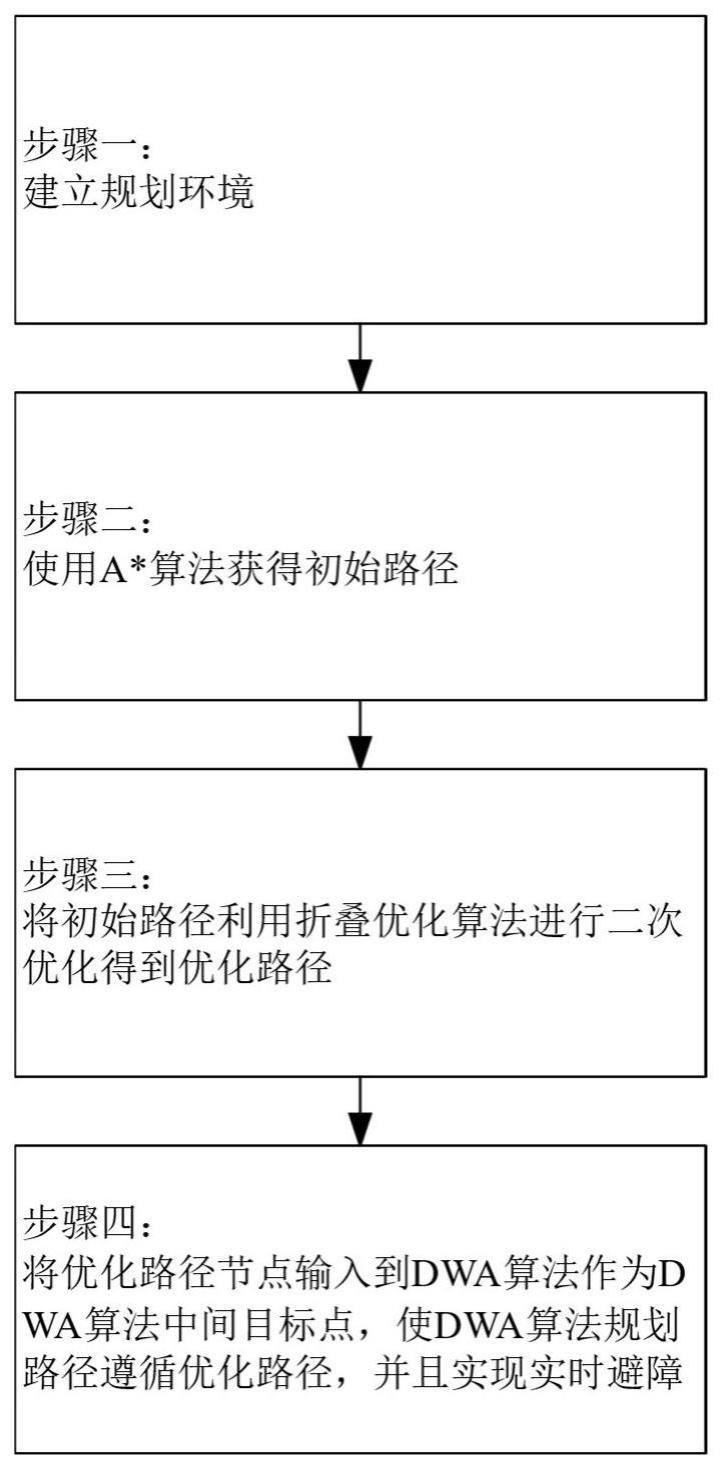
3、步骤一、建立规划环境;
4、步骤二、使用a*算法获得初始路径;
5、步骤三、将初始路径利用折叠优化算法进行二次优化得到优化路径;
6、步骤四、将优化路径节点输入到dwa算法作为dwa算法中间目标点,使dwa算法规划路径遵循优化路径,并且实现实时避障。
7、作为优选,所述步骤一所述的建立规划环境是指用激光雷达获取移动机器人运行的环境,将环境转化为栅格地图,对地图建立全局坐标系,明确每个栅格的坐标,并明确移动机器人的起点和终点。
8、作为优选,所述步骤二所述的使用a*算法获得初始路径是指获得初始路径使用的算法为a*算法。
9、作为优选,所述步骤三所述的将初始路径利用折叠优化算法进行二次优化得到优化路径,是基于折叠优化算法思想设计优化路径的方法。具体包括以下几步:s1:判断初始路径的拐点设定。i为初始路径中某一节点,i-1为这一节点的顺序上一节点,i+1为这一节点的顺序下一节点,|di|≠0时节点i为拐点,|di|的计算方法为:
10、式中:xi为i节点横坐标,yi为i节点纵坐标,xi-1为i-1节点横坐标,yi-1为i-1节点横坐标,xi+1为i-1节点横坐标,yi+1为i-1节点横坐标,a为单个栅格的宽度。s2:判断拐点的朝向。设定i为初始路径中某一拐点,判断方法为:
11、式中lu,ld,ru,rd代表四种拐点朝向类型,“&”代表的数学含义为“且”,“or”代表的数学含义为“或”。s3:初始路径拓展得到路径road(l)和road(r)。拓展方法为:设定i为初始路径中某一拐点
12、式中xi为i拐点横坐标,yi为i拐点纵坐标,xnew为一次折叠拓展后新节点的横坐标,ynew为一次折叠拓展后新节点的纵坐标。将进行一次折叠拓展后得到的路径再次判断拐点和拐点类型,然后继续进行折叠拓展,触碰障碍物停止,直到路径中所有与拐点i拐点朝向类型相同的拐点均无法继续拓展时折叠拓展停止。此时road(l)为初始路径仅对lu和ld类拐点进行拓展的到的路径,road(r)为初始路径仅对ru和rd类拐点进行拓展得到的路径。s4:在road(l)和road(r)包围形成的局部优化区域内确定局部优化路径。所述s4中局部优化区域为road(l)和road(r)相邻公共节点之间由road(l)和road(r)构成的封闭多边形;所述确定局部优化路径的方法为:设定road(l)和road(r)相邻公共节点为a和b,road(l)在a和b之间的路径为lab,road(r)在a和b之间的路径为rab,若road(l)和road(r)若a和b之间的连线完全处于局部优化区域内则将a和b直接相连,连线为局部优化路径。若a和b之间的连线不完全处于局部优化区域内,按照求得{k};按照求得h(n),式中xb为b节点的横坐标,yb为b节点的纵坐标,xk(n)为{k}集合中节点n的横坐标,yk(n)为{k}集合中节点n的纵坐标;按求得l(n),式中xa为a节点的横坐标,ya为a节点的纵坐标,xb为b节点的横坐标,yb为b节点的纵坐标,xk(n)为{k}集合中节点n的横坐标,yk(n)为{k}集合中节点n的纵坐标;按k(n)=l(n)+h(n)求得k(n),将{k}中k(n)值最小的元素kmin取出并判断a是否可以与kmin直接相连。若a与kmin不可直接相连则从{k}中删除当前kmin并取出新的kmin直到a与kmin可以直接相连。此时kmin与b确定一个新的局部优化区域,可以继续按照确定局部优化路径的方法确定局部优化路线。s5:road(l)和road(r)的重合路径与所有折叠优化区的局部优化路径共同构成优化路径。
13、作为优选,所述步骤四所述的将优化路径节点输入到dwa算法作为dwa算法中间目标点,使dwa算法规划路径遵循优化路径,并且实现实时避障。
14、本发明的有益效果:
15、1、利用折叠优化算法对a*算法得到的初始路径进行优化从而得到优化路径,剔除了冗余共线节点,减少了路径拐点,缩短了路径距离。
16、2、改进的a*算法与dwa算法融合,将优化路径节点输入到dwa算法作为dwa算法中间目标点,使dwa算法规划路径遵循优化路径,并且实现实时避障。既能够使得路径进一步平滑,又能够实现实时避障,还能够解决dwa算法的盲目性,保证了移动机器人在复杂环境中的适应能力。
技术特征:
1.一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述步骤一中建立规划环境是指用激光雷达获取移动机器人运行的环境,将环境转化为栅格地图,对地图建立全局坐标系,明确每个栅格的坐标,并明确移动机器人的起点和终点。
3.根据权利要求1所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述步骤二中获得初始路径使用的算法为a*算法。
4.根据权利要求1所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述步骤三中得到优化路径使用的算法为折叠优化算法。
5.根据权利要求1所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述步骤三中折叠优化算法,具体包括以下步骤:
6.根据权利要求5所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述s1中判断初始路径的拐点的方法如下:
7.根据权利要求5所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述s2中判断拐点朝向的方法为:
8.根据权利要求5所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述s3中初始路径拓展得到路径road(l)和road(r)的拓展方法为:
9.根据权利要求5所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述s3中road(l)为初始路径中所有拐点朝向类型为lu和ld的拐点经过折叠拓展后得到的路径,所述s3中road(r)为初始路径中所有拐点朝向类型为ru和rd的拐点经过折叠拓展后得到的路径。
10.根据权利要求5所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述s4中局部优化区域为road(l)和road(r)相邻公共节点之间由road(l)和road(r)构成的封闭多边形;所述确定局部优化路径的方法为:
11.根据权利要求1所述的一种改进a*融合dwa算法的移动机器人路径规划方法,其特征在于:所述步骤四中将所述步骤三中利用折叠优化算法进行二次优化得到优化路径与dwa算法的融合,提取优化路径的关键点作为dwa算法的中间目标点,通过本发明所述改进a*融合dwa算法,实现移动机器人导航过程中的最优路径规划,同时兼具实时避障功能。
技术总结
本发明公开了一种改进A*融合DWA算法的移动机器人路径规划方法,首先用激光雷达获取移动机器人运行的环境,将环境转化为栅格地图,对地图建立全局坐标系,明确每个栅格的坐标;其次,利用A*算法进行路径规划,得到初始路径,将初始路径利用折叠优化算法进行二次优化得到优化路径;最后,将优化路径节点输入到DWA算法作为中间目标点,使DWA算法规划路径遵循优化路径。本发明采用的改进A*融合DWA算法,优化了传统A*算法的路径节点,减少了拐点数量,能够实时避障,保证了移动机器人在复杂环境中的适应能力。
技术研发人员:杨瑞刚,郭浩显,史易烜,王宇琦,苗琦
受保护的技术使用者:太原科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!