一种磁悬浮转子径向位移检测方法和装置与流程
本发明涉及磁悬浮转子控制,特别是涉及一种磁悬浮转子径向位移检测方法、一种磁悬浮转子径向位移检测装置、一种电子设备和存储介质。
背景技术:
1、磁悬浮转子即基于磁悬浮轴承实现对转子无接触、无磨损的支撑,转子与叶轮直接连接,传动零损失,以此达到成功输送气体等介质而机器内部无磨损、低噪音、无需润滑等效果。为了让转子能够平稳高速转动,需要通过检测并反馈实时位移信号进行计算分析后,通过改变轴承线圈电流大小,从而实现转子的稳定转动。
2、目前针对于磁悬浮转子常用的位移传感器为电涡流传感器,电涡流传感器与转子并不直接接触,而是有一定的距离,电涡流传感器采集到的位移信号经过差分处理电路后得到,在信号获取速度上较低;且在对于转子处于柔性弯曲等一些非刚性状态时,电涡流传感器检测到的位移信号与实际位移有一定的偏差,因此在信号准确性也较低。并且常用的混合式的位移传感器,内径较大,对磁悬浮转子的占用内部空间较大。
技术实现思路
1、鉴于上述问题,提出了本发明实施例以便提供一种克服上述问题或者至少部分地解决上述问题的一种磁悬浮转子径向位移检测方法、一种磁悬浮转子径向位移检测装置、一种电子设备和存储介质。
2、在本发明的第一个方面,本发明实施例公开了一种磁悬浮转子径向位移检测方法,应用于控制器,所述控制器与姿态传感器连接,所述姿态传感器位于磁悬浮转子的端面,所述方法包括:
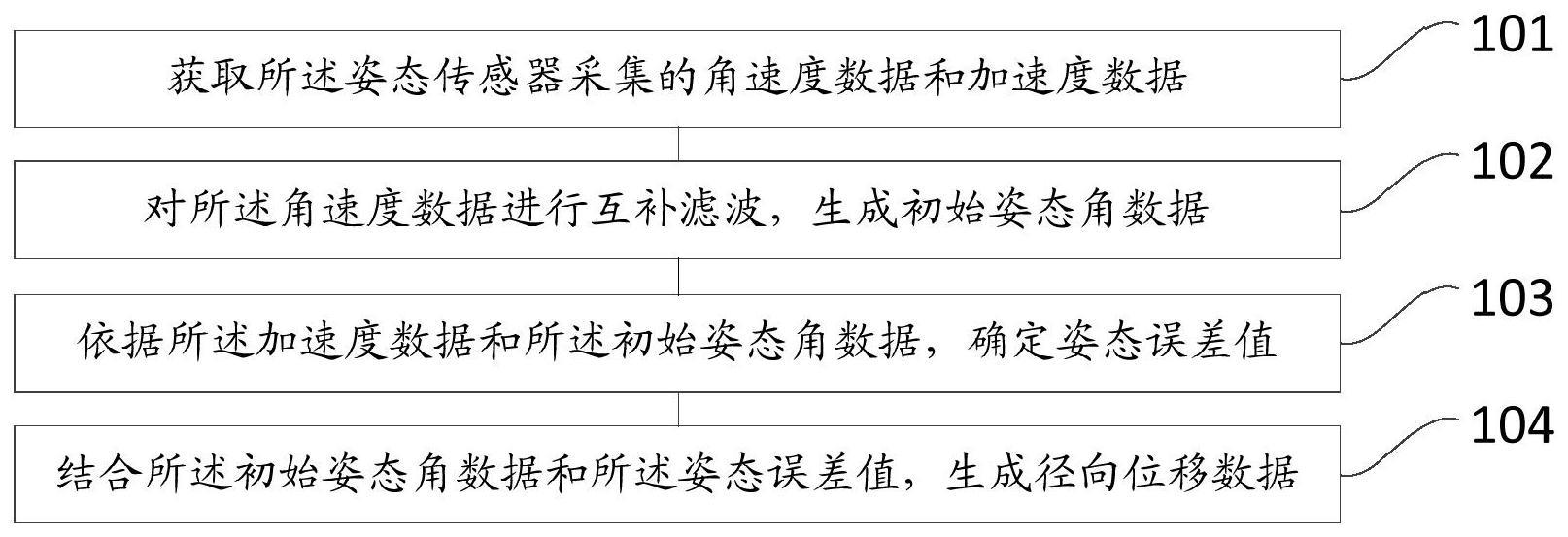
3、获取所述姿态传感器采集的角速度数据和加速度数据;
4、对所述角速度数据进行互补滤波,生成初始姿态角数据;
5、依据所述加速度数据和所述初始姿态角数据,确定姿态误差值;
6、结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据。
7、进一步地,所述对所述角速度数据进行互补滤波,生成初始姿态角数据的步骤包括:
8、依据所述角速度数据计算四元数;
9、将所述四元数确定为所述初始姿态角数据。
10、进一步地,所述加速度数据包括真实加速度值,所述依据所述加速度数据和所述初始姿态角数据,确定姿态误差值的步骤包括:
11、基于预设旋转矩阵,将所述四元数转换为理论加速度;
12、将所述真实加速度值转换为第一向量,将所述理论加速度值转换为第二向量;
13、计算所述第一向量和所述第二向量的向量叉积;
14、依据所述向量叉积确定所述姿态误差值。
15、进一步地,所述结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据的步骤包括:
16、基于预设控制策略,依据所述姿态误差值,确定补正值;
17、将所述补正值叠加到所述初始姿态角数据中,生成所述径向位移数据。
18、进一步地,所述预设控制策略为比例积分策略,所述比例积分策略包括比例权值和积分权值;所述基于预设控制策略,依据所述姿态误差值,确定补正值的步骤包括:
19、确定所述姿态误差值与所述比例权值的第一乘积值;
20、确定所述姿态误差值与所述积分权值的第二乘积值;
21、将所述第一乘积值和所述第二乘积值之和确定为所述补正值。
22、进一步地,所述控制器包括两个环形控制器,两个所述环形控制器位于磁悬浮转子的不同端面。
23、进一步地,所述姿态传感器设置于所述环形控制器的内部,所述姿态传感器与所述环形控制器基于集成电路总线连接。
24、在本发明的第二个方面,本发明实施例公开了一种磁悬浮转子径向位移检测装置,应用于控制器,所述控制器与姿态传感器连接,所述姿态传感器位于磁悬浮转子的端面,所述装置包括:
25、获取模块,用于获取所述姿态传感器采集的角速度数据和加速度数据;
26、互补滤波模块,用于对所述角速度数据进行互补滤波,生成初始姿态角数据;
27、误差确定模块,用于依据所述加速度数据和所述初始姿态角数据,确定姿态误差值;
28、修正模块,用于结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据。
29、在本发明的第三个方面,本发明实施例还公开了一种电子设备,包括处理器、存储器及存储在所述存储器上并能够在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上所述的磁悬浮转子径向位移检测方法的步骤。
30、在本发明的第四个方面,本发明实施例还公开了一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如上所述的磁悬浮转子径向位移检测方法的步骤。
31、本发明实施例包括以下优点:
32、本发明实施例通过姿态传感器位于磁悬浮转子的端面,获取所述姿态传感器采集的角速度数据和加速度数据;对所述角速度数据进行互补滤波,生成初始姿态角数据;依据所述加速度数据和所述初始姿态角数据,确定姿态误差值;结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据。通过集成姿态传感器在磁悬浮转子端面,使得姿态传感器与磁悬浮转子直接接触,采集到的加速度和角速度更加准确,进而基于加速度和角速度计算得到的径向位移数据准确性更高,可以提高磁悬浮转子控制的可靠性;并且由于姿态传感器与磁悬浮转子直接接触,采集到达加速度和角速度更贴近于磁悬浮转子当前的实际加速度和角速度,获取速度的延时短,从而提高了磁悬浮转子控制的响应速度;而且姿态传感器位于磁悬浮转子的端面,可以减少对内部空间的占用。
技术特征:
1.一种磁悬浮转子径向位移检测方法,其特征在于,应用于控制器,所述控制器与姿态传感器连接,所述姿态传感器位于磁悬浮转子的端面,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述角速度数据进行互补滤波,生成初始姿态角数据的步骤包括:
3.根据权利要求2所述的方法,其特征在于,所述加速度数据包括真实加速度值,所述依据所述加速度数据和所述初始姿态角数据,确定姿态误差值的步骤包括:
4.根据权利要求1所述的方法,其特征在于,所述结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据的步骤包括:
5.根据权利要求4所述的方法,其特征在于,所述预设控制策略为比例积分策略,所述比例积分策略包括比例权值和积分权值;所述基于预设控制策略,依据所述姿态误差值,确定补正值的步骤包括:
6.根据权利要求1所述的方法,其特征在于,所述控制器包括两个环形控制器,两个所述环形控制器位于磁悬浮转子的不同端面。
7.根据权利要求6所述的方法,其特征在于,所述姿态传感器设置于所述环形控制器的内部,所述姿态传感器与所述环形控制器基于集成电路总线连接。
8.一种磁悬浮转子径向位移检测装置,其特征在于,应用于控制器,所述控制器与姿态传感器连接,所述姿态传感器位于磁悬浮转子的端面,所述装置包括:
9.一种电子设备,其特征在于,包括处理器、存储器及存储在所述存储器上并能够在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如权利要求1至7中任一项所述的磁悬浮转子径向位移检测方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的磁悬浮转子径向位移检测方法的步骤。
技术总结
本发明实施例提供了一种磁悬浮转子径向位移检测方法和装置,所述方法应用于控制器,所述控制器与姿态传感器连接,所述姿态传感器位于磁悬浮转子的端面,包括:获取所述姿态传感器采集的角速度数据和加速度数据;对所述角速度数据进行互补滤波,生成初始姿态角数据;依据所述加速度数据和所述初始姿态角数据,确定姿态误差值;结合所述初始姿态角数据和所述姿态误差值,生成径向位移数据。通过集成姿态传感器在磁悬浮转子端面,直接基于姿态传感器的加速度和角速度进行径向位移检测,可以提高磁悬浮控制的可靠性和响应速度、节省结构空间。
技术研发人员:王运博,林润方,唐文婕
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!