测定系统和检查方法与流程
本公开涉及一种测定系统和检查方法。
背景技术:
1、在专利文献1中公开有一种测定装置,该测定装置具备:测头,其进行工件的三维测定;以及机器人臂,其在前端具有表面粗糙度仪。
2、在专利文献1中公开有一种测定装置,该测定装置具备机器人臂,该机器人臂在前端具有表面粗糙度仪。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2021-092531号公报
技术实现思路
1、发明要解决的问题
2、然而,在专利文献1所公开的测定装置中,为了避免三维坐标测定机与支承表面粗糙度仪的机器人臂之间的碰撞,在由一方的测定机进行测定时使另一方退避。因此,无法同时测定三维形状和表面粗糙度。
3、然而,在专利文献1所公开的方法中,在表面粗糙度的测定时有可能会损伤被测定物的表面。
4、本公开的一个方式的目的在于实现一种对被测定物的尺寸和表面粗糙度使用同一触针同时进行测定的测定系统。
5、本公开的另一个方式的目的在于实现一种能够不损伤被测定物的表面地检测表面的粗糙度的测定系统。
6、用于解决问题的方案
7、为了解决上述的课题,本公开的一个方式所涉及的测定系统具备触针、手部、机器人臂、力觉传感器以及控制装置。触针用于检测被测定物的表面的粗糙度。手部被安装有触针。机器人臂对手部以能够变更该手部的位置和姿势的方式进行支承。在将触针按压接触于被测定物的表面时,力觉传感器检测从被测定物的表面向触针的反作用力。控制装置具有一个或多个处理器、以及存储部。存储部存储与被测定物的三维形状有关的三维数据。一个或多个处理器执行路径设定处理、第一获取处理、第二获取处理以及尺寸测定处理。在路径设定处理中,设定使触针沿着被测定物的表面进行仿形的手部的移动路径。该设定是基于三维数据、以使由力觉传感器检测的反作用力成为规定值的方式进行的。在第一获取处理中,获取手部实际运动的轨迹。该获取是以一边以使由力觉传感器检测出的反作用力成为规定值的方式进行调整、一边实际使触针沿着被测定物的表面进行仿形的方式进行的。在第二获取处理中,从触针获取被测定物的表面的粗糙度。该获取是在通过第一获取处理实际使触针沿着被测定物的表面进行仿形的期间进行的。在尺寸测定处理中,测定被测定物的尺寸。该测定是基于移动路径和三维数据中的至少一方以及轨迹来进行的。
8、为了解决上述的课题,本公开的另一个方式所涉及的测定系统具备触针、手部、机器人臂、力觉传感器以及控制装置。触针用于检测被测定物的表面的粗糙度。手部被安装有触针。机器人臂对手部以能够变更手部的位置和姿势的方式进行支承。在将触针按压接触于被测定物的表面时,力觉传感器检测从被测定物的表面向触针的反作用力。控制装置具有一个或多个处理器。一个或多个处理器执行测定处理和判定处理。在测定处理中,从触针获取被测定物的表面的粗糙度。该获取是通过一边以使由力觉传感器检测出的反作用力成为规定值的方式调整手部的姿势和位置、一边使触针沿着被测定物的表面进行仿形来进行的。在判定处理中,判定通过测定处理获取到的被测定物的表面的粗糙度是否在规定范围内。
9、本公开的各方式所涉及的控制装置也可以通过计算机来实现,在该情况下,通过使计算机作为所述控制装置具备的各部(软件要素)进行动作来通过计算机实现所述控制装置的控制装置的程序以及记录有该程序的计算机可读取的记录介质也纳入本公开的范畴。
10、发明的效果
11、根据本公开的一个方式,能够对被测定物的尺寸和表面粗糙度使用同一触针同时进行测定。
12、根据本公开的另一个方式,能够不损伤被测定物的表面地检测表面的粗糙度。
技术特征:
1.一种测定系统,具备:
2.根据权利要求1所述的测定系统,其中,
3.根据权利要求1所述的测定系统,其中,
4.根据权利要求1所述的测定系统,其中,
5.根据权利要求1至4中的任一项所述的测定系统,其中,
6.根据权利要求1至4中的任一项所述的测定系统,其中,
7.一种检查方法,使用根据权利要求5所述的测定系统来检查所述被测定物的表面的粗糙度和所述被测定物的尺寸。
8.一种测定系统,具备:
9.根据权利要求8所述的测定系统,其中,
10.一种检查方法,使用根据权利要求8或9所述的测定系统,所述检查方法包括以下工序:
11.根据权利要求10所述的检查方法,其中,还包括以下工序:
12.根据权利要求11所述的检查方法,其中,
13.根据权利要求11所述的检查方法,其中,
技术总结
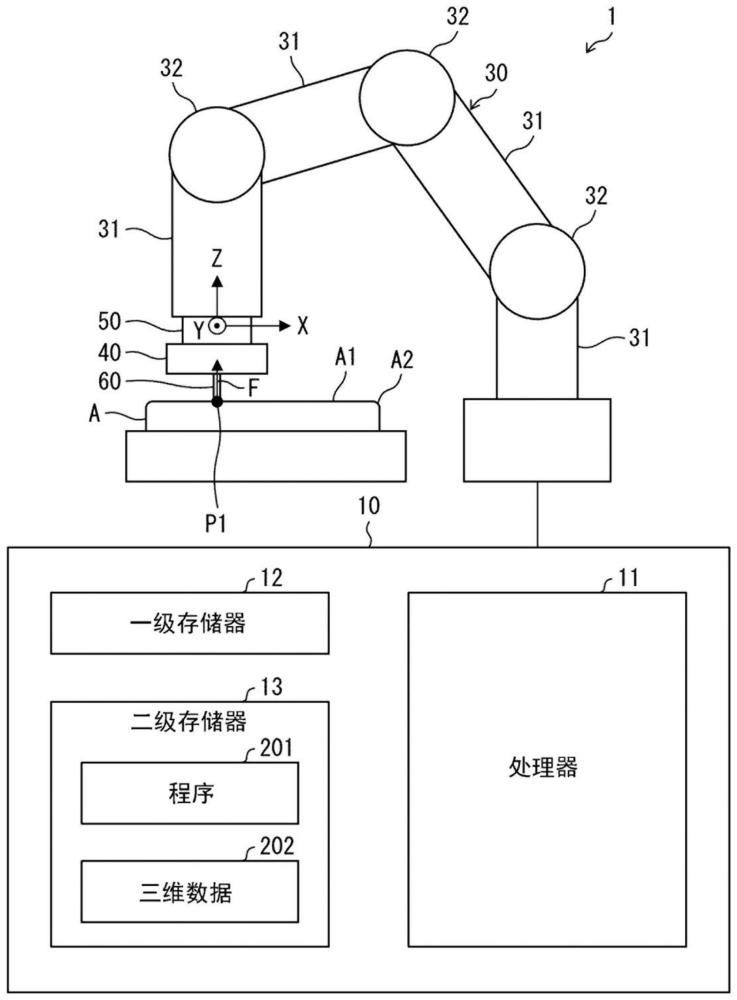
本公开涉及测定系统和检查方法。在测定系统(1)中,处理器(11)基于三维数据(202),以使由力觉传感器(50)检测的反作用力成为规定值的方式设定使触针(60)沿着被测定物(A)的表面(A1等)进行仿形的手部(40)的移动路径。处理器(11)一边以使该反作用力成为规定值的方式进行调整,一边使触针(60)沿着被测定物(A)的表面(A1等)进行仿形,获取手部(40)运动的轨迹。处理器(11)在使触针(60)沿着被测定物(A)的表面(A1等)进行仿形的期间,从触针(60)获取该表面(A1等)的粗糙度。处理器(11)基于移动路径和三维数据(202)中的至少一方以及轨迹来测定被测定物(A)的尺寸。
技术研发人员:田名网克周,林美由希
受保护的技术使用者:新东工业株式会社
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!