基于交通雷达的隧道目标点云检测方法与流程
本发明涉及雷达数据处理,具体而言,涉及一种基于交通雷达的隧道目标点云检测方法、设备和计算机可读存储介质。
背景技术:
1、本发明对于背景技术的描述属于与本发明相关的相关技术,仅仅是用于说明和便于理解本发明的
技术实现要素:
,不应理解为申请人明确认为或推定申请人认为是本发明在首次提出申请的申请日的现有技术。
2、交通雷达在隧道中的应用是为了实现对车辆和行人等交通目标的检测和跟踪。然而,由于隧道环境的特殊性,交通雷达在隧道中面临着严重的多径干扰问题。多径干扰是指雷达信号在传播过程中经过多条路径反射、散射后到达接收器,导致接收到的信号中存在多个回波,干扰了目标的检测和定位。
3、在隧道中,多径干扰问题尤为严重,主要有以下几个原因:(1)隧道内壁面反射:隧道内的墙壁和天花板等表面会反射雷达信号,形成额外的回波信号,干扰目标的回波信号。(2)多个反射点:隧道内的结构物和障碍物可能存在多个反射点,导致信号经过多条路径传播,增加了多径干扰的复杂性。
4、由于多径干扰的存在,隧道中的目标点云检测结果可能不稳定,角度偏差较大,可能出现检测的点云在车道之外的情况。这对于点云后续的跟踪滤波处理也难以形成稳定的轨迹。
5、为了解决上述技术问题,本发明提出了一种基于交通雷达的隧道目标点云检测方法、设备和计算机可读存储介质,能够在隧道环境中有效地识别和定位目标,减少多径干扰对目标检测的影响,提供稳定和准确的点云数据。
技术实现思路
1、本发明提供了一种基于交通雷达的隧道目标点云检测方法、设备和计算机可读存储介质,能够在隧道环境中有效地识别和定位目标,减少多径干扰对目标检测的影响,提供稳定和准确的点云数据。
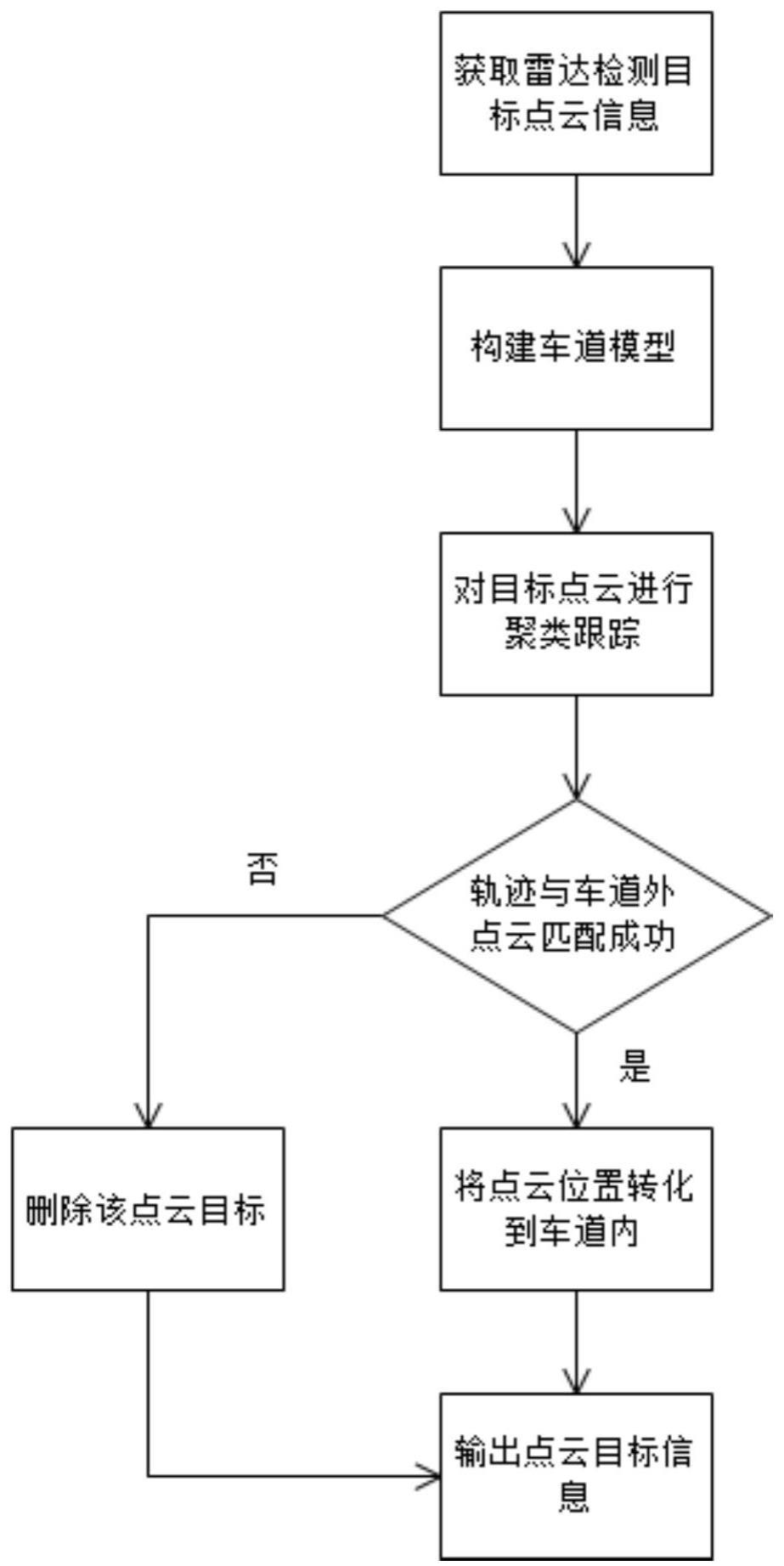
2、本发明第一方面的实施例提供了一种基于交通雷达的隧道目标点云检测方法,包括如下步骤:获取雷达检测的初始目标点云信息;构建车道模型;对目标点云进行处理形成稳定轨迹;根据稳定轨迹与车道外点云目标做匹配;对匹配成功的车道外点云目标,根据点云信息特征将其坐标转化到车道内;对匹配失败的车道外点云目标进行删除;输出点云目标信息。
3、优选地,获取雷达检测的初始目标点云信息的步骤中,初始目标点云信息包括距离信息、角度信息、速度信息。
4、优选地,构建车道模型步骤中,根据实际车道环境构建车道模型,包括直道、弯道、直道与弯道结合情况。
5、优选地,根据实际车道环境构建车道模型中,对于直道与弯道结合情况,构建车道模型的参数包括车道宽度、直道长度、弯道角度、弯道长度。
6、优选地,对目标点云进行处理形成稳定轨迹的步骤具体包括如下操作:对车道内的目标点云进行dbscan算法聚类;对聚类后的目标点云采用扩展卡尔曼算法进行跟踪滤波;得到稳定轨迹。
7、优选地,根据稳定轨迹与车道外点云目标做匹配步骤中,对每个稳定轨迹与车道外的每个点云目标进行匹配条件计算,匹配条件包括:轨迹速度与点云速度相差小于第一预设值;轨迹y方向坐标与点云y方向坐标相差小于第二预设值,其中,y方向为雷达正前方朝向,y方向与x方向垂直,x方向为雷达左右横向方向;轨迹的snr信噪比与点云的snr信噪比相差小于第三预设值。
8、优选地,对匹配成功的车道外点云目标,根据点云信息特征将其坐标转化到车道内的步骤中,转化包括如下操作:获取该目标点云的位置信息;根据位置信息与车道模型的位置关系判断该目标点云处于左边界外或是右边界外;根据目标点云的位置信息与车道模型的边界位置关系,计算第一横向距离差ghostdist;根据稳定轨迹的坐标信息与车道模型的边界位置关系,计算第二横向距离差referdist;根据第一横向距离差ghostdist与第二横向距离差referdist相减取绝对值的结果进行坐标转化;将经过坐标转化后的目标点云信息输出。
9、优选地,根据第一横向距离差ghostdist与第二横向距离差referdist相减取绝对值的结果进行坐标转化。具体包括如下操作:若第一横向距离差ghostdist与第二横向距离差referdist相减取绝对值的结果大于第四预设值;当该目标点云在左边界外时,横向坐标posx需要转化为posx,posx=posx+sumlanewidth;当该目标点云在右边界外时,横向坐标posx需要转化为posx,posx=posx–sumlanewidth;其中,sumlanewidth表示车道总宽度;若第一横向距离差ghostdist与第二横向距离差referdist相减取绝对值的结果小于第四预设值;当该目标点云在左边界外时,横向坐标posx需要转化为posx,posx=leftbound+ghostdist,leftbound表示车道左边界的横向坐标;当该目标点云在右边界外时,横向坐标posx需要转化为posx,posx=rightbound-ghostdist,rightbound表示车道右边界的横向坐标。
10、本发明第二方面的实施例还提供了一种基于交通雷达的隧道目标点云检测设备,其包括存储器和处理器;其中,存储器用于存储可执行程序代码;处理器用于读取存储器中存储的可执行程序代码以执行基于交通雷达的隧道目标点云检测方法。
11、本发明第三方面的实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现基于交通雷达的隧道目标点云检测方法。
12、本发明提供的基于交通雷达的隧道目标点云检测方法、设备和计算机可读存储介质,能够在隧道环境中有效地识别和定位目标,减少多径干扰对目标检测的影响,提供稳定和准确的点云数据。
13、本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种基于交通雷达的隧道目标点云检测方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述获取雷达检测的初始目标点云信息的步骤中,所述初始目标点云信息包括距离信息、角度信息、速度信息。
3.根据权利要求1所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述构建车道模型步骤中,根据实际车道环境构建车道模型,包括直道、弯道、直道与弯道结合情况。
4.根据权利要求3所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述根据实际车道环境构建车道模型中,对于直道与弯道结合情况,构建车道模型的参数包括车道宽度、直道长度、弯道角度、弯道长度。
5.根据权利要求1所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述对目标点云进行处理形成稳定轨迹的步骤具体包括如下操作:
6.根据权利要求1所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述根据所述稳定轨迹与车道外点云目标做匹配步骤中,对每个稳定轨迹与车道外的每个点云目标进行匹配条件计算,所述匹配条件包括:
7.根据权利要求1-6中任意一项所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述对匹配成功的车道外点云目标,根据点云信息特征将其坐标转化到车道内的步骤中,转化包括如下操作:
8.根据权利要求7所述的基于交通雷达的隧道目标点云检测方法,其特征在于,所述根据所述第一横向距离差ghostdist与所述第二横向距离差referdist相减取绝对值的结果进行坐标转化。具体包括如下操作:
9.一种基于交通雷达的隧道目标点云检测设备,其包括存储器和处理器;其中,所述存储器用于存储可执行程序代码;所述处理器用于读取所述存储器中存储的可执行程序代码以执行根据权利要求1-8任意一项所述的基于交通雷达的隧道目标点云检测方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-8任意一项所述的基于交通雷达的隧道目标点云检测方法。
技术总结
本发明提供了一种基于交通雷达的隧道目标点云检测方法,包括如下步骤:获取雷达检测的初始目标点云信息;构建车道模型;对目标点云进行处理形成稳定轨迹;根据稳定轨迹与车道外点云目标做匹配;对匹配成功的车道外点云目标,根据点云信息特征将其坐标转化到车道内;对匹配失败的车道外点云目标进行删除;输出点云目标信息。本发明提供的基于交通雷达的隧道目标点云检测方法、设备和计算机可读存储介质,能够在隧道环境中有效地识别和定位目标,减少多径干扰对目标检测的影响,提供稳定和准确的点云数据。
技术研发人员:饶鼎,李俊,赵宇,李妞妞,张悦,柏宇豪
受保护的技术使用者:嘉兴聚速电子技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!