一种水下机器人的抗紊流测试装置的制作方法
本发明涉及机器人测试领域,具体是涉及一种水下机器人的抗紊流测试装置。
背景技术:
1、紊流又称湍流,是流体的一种流动状态。水下机器人是一种在水下作业的机器人,受到工作环境影响,其在工作时会受到水流变化带来的冲击,致使检测数据和动作稳定性受到影响,特别是在遇到紊流时,水流的流速较快,流场中有许多小漩涡,对水下机器人的机体稳定性造成较大冲击。
2、为此,中国专利申请cn111141540a公开了一种水下机器人手臂抗水流干扰测试台,其通过水泵的启动,可以将测试槽内部的水源进行吸收,再通过分支管循坏排至到测试槽的内部,对机器人进行测试槽,以及通过出水管排至到喷嘴的内部,通过喷嘴进行喷洒水源,进行顶部抗水流测试槽,通过右侧以及顶部的水源喷射,可以有效的对机器人的手臂进行冲击,进而可以提高测试的全面性和准确性,进一步提高了水下机器人的合格率,而且也可以注满四分之三,通过分支管进行喷洒,形成暗流,进一步满足了机器人在水底中抗暗流的测试槽;通过第一电机的启动,可以带动转动轴进行旋转,间接带动螺纹杆进行旋转,螺纹杆旋转时,可以带动螺纹块左右运动,间接带动驱动块左右运动,通过驱动块左右的运动,可以带动滑动板和u型块左右运动,间接带动机器人本体左右运动,以便于模拟机器人在水中行走的状态,进而提高测试槽的全面性,操作简单,使用方便,可以准确的对机器人的手臂进行水流干扰测试,有利于提高了机器人的产品质量。
3、但是,现有技术仅针对水下机器人的手臂进行抗水流测试,在对整个水下机器人进行抗紊流测试时,仍需要将寻找合适水域,将水下机器人放置到水中进行测试,但是这种测试过程中,很难准确收集实验数据,导致无法达到预期的测试效果。
技术实现思路
1、针对上述问题,提供一种水下机器人的抗紊流测试装置,通过缸体、紊流制造装置和检测装置解决了水下机器人在进行整机测试时实验数据的收集较为困难的问题。
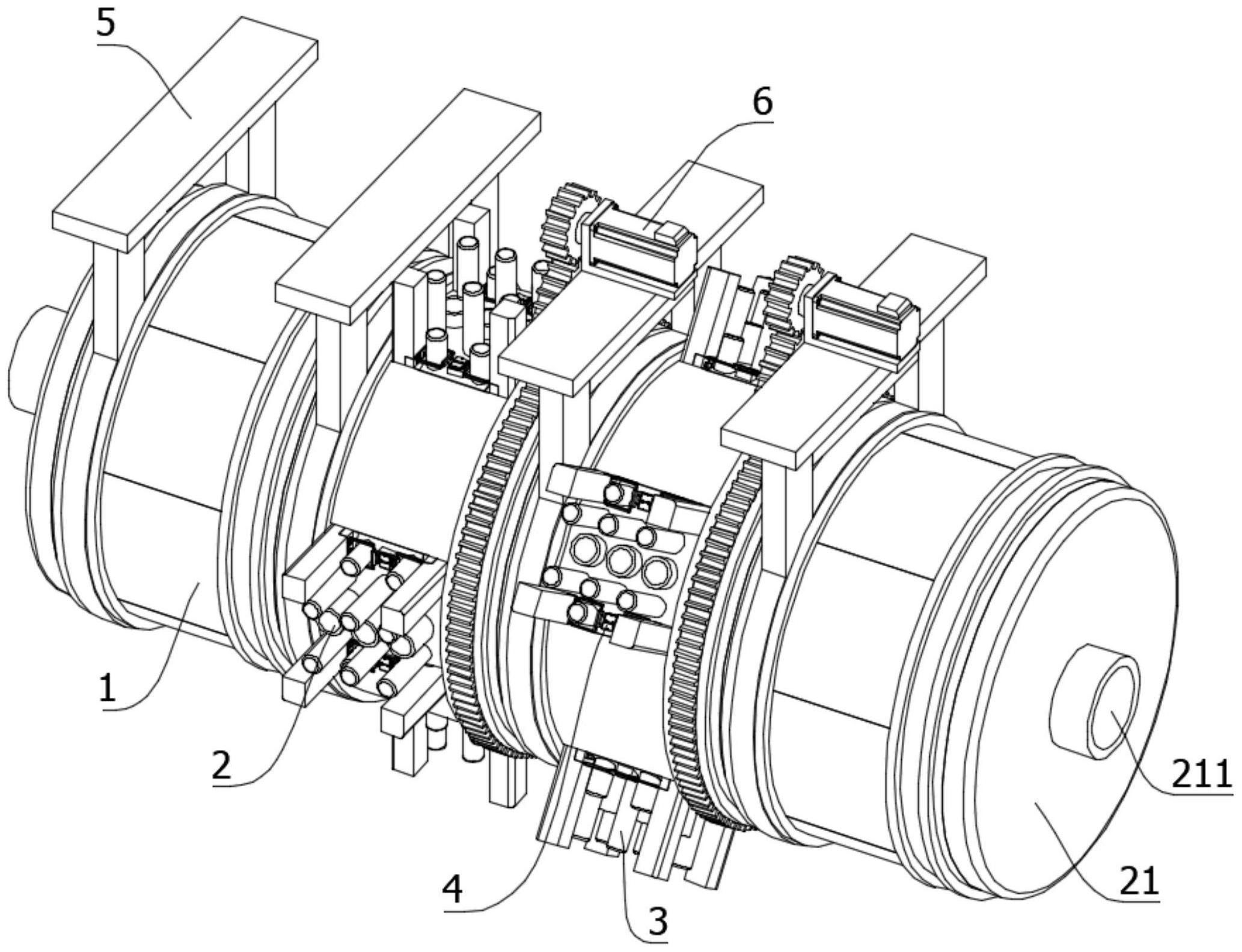
2、为解决现有技术问题,本发明提供一种水下机器人的抗紊流测试装置,包括缸体、紊流制造装置和检测装置;紊流制造装置包括端盖和第一安装座;端盖设有两个且其分别安装在缸体的两端;第一安装座设置在缸体的内部;检测装置包括第二安装座和检测组件;第二安装座安装在缸体上,第一安装座设置在第二安装座上,第一安装座和第二安装座至少设有两个,多个第二安装座沿缸体的轴线中心对称设置;检测组件包括第一氮气弹簧,第一氮气弹簧安装在第二安装座上,且第一氮气弹簧的活塞杆与第一安装座连接。
3、优选的,检测装置还包括二级缓冲组件,二级缓冲组件包括第二氮气弹簧和缓冲板;第二氮气弹簧安装在第二安装座上;第二氮气弹簧的活塞杆与缓冲板连接,缓冲板位于第一安装座和第二安装座之间。
4、优选的,第二安装座上还设有辅助控制装置,辅助控制装置包括移动控制组件,移动控制组件包括棘齿条、固定座、斜向卡块和弹性件;棘齿条安装在第二安装座上;固定座安装在第一安装座上;斜向卡块滑动安装在固定座上,斜向卡块与棘齿条单向传动配合;弹性件的两端分别与固定座和斜向卡块连接。
5、优选的,辅助控制装置还包括复位组件,复位组件包括控制片、连接杆和直线驱动器;控制片滑动安装在固定座上;连接杆的两端分别与控制片和直线驱动器的驱动端连接;直线驱动器安装在第二安装座上。
6、优选的,缸体包括环形安装管,环形安装管至少设有两个,多个环形安装管沿轴线方向阵列分布,且相邻的环形安装管密闭连接;第一安装座安装在环形安装管上;环形安装管的其中一端开设有环形槽,其另一端安装有与环形槽配合的环形密封条。
7、优选的,测试装置还包括调整装置,调整装置包括支撑架和旋转驱动组件;相邻的环形安装管之间转动连接,环形安装管转动安装在支撑架上;旋转驱动组件安装在支撑架上且其用于控制环形安装管转动。
8、优选的,旋转驱动组件包括旋转驱动器、转轴、第一旋转齿轮、第二旋转齿轮和齿环;旋转驱动器安装在支撑架上;转轴转动安装在支撑架上;第一旋转齿轮和第二旋转齿轮分别套接在转轴和旋转驱动器的驱动端上;第一旋转齿轮和第二旋转齿轮传动连接;齿环套接在环形安装管上,齿环与第一旋转齿轮传动连接。
9、优选的,缸体还包括缓冲舱;多个环形安装管相互配合形成两端开口的管状容器;缓冲舱设有两个且其分别设置在所述管状容器的两端;缓冲舱上转动安装有舱盖。
10、优选的,第二安装座和缓冲板上分别安装有第一压力传感器和第二压力传感器;第一压力传感器位于第二安装座和第一氮气弹簧的活塞杆之间;第二压力传感器位于缓冲板和第二氮气弹簧的活塞杆之间。
11、优选的,第一安装座上还安装有用于包裹棘齿条的密封盒,密封盒与第一安装座密闭配合。
12、本发明相比较于现有技术的有益效果是:
13、1、本发明通过缸体、紊流制造装置和检测装置实现了模拟水下紊流环境的功能,达到检测水下机器人在遇到紊流时的状态的效果,以便于操作人员观测和收集水下机器人在测试过程中的情况,解决了水下机器人在进行整机测试时实验数据的收集较为困难的问题。
14、2、本发明通过第二氮气弹簧和缓冲板实现了二段缓冲的功能,达到在水下机器人所受冲击较大且其抗紊流能力较差时对其进行进一步缓冲的效果,避免其与缸体内壁发生剧烈碰撞,且能够对其抗紊流性能进行细化判断。
15、3、本发明通过棘齿条、固定座、斜向卡块和弹性件实现了在测试后固定第二安装座位置的功能,达到保存测试结果的效果,使得操作人员有足够时间观测和记录实验数据。
技术特征:
1.一种水下机器人的抗紊流测试装置,其特征在于,包括缸体(1)、紊流制造装置(2)和检测装置(3);
2.根据权利要求1所述的一种水下机器人的抗紊流测试装置,其特征在于,检测装置(3)还包括二级缓冲组件(33),二级缓冲组件(33)包括第二氮气弹簧(331)和缓冲板(332);
3.根据权利要求1或2所述的一种水下机器人的抗紊流测试装置,其特征在于,第二安装座(31)上还设有辅助控制装置(4),辅助控制装置(4)包括移动控制组件(41),移动控制组件(41)包括棘齿条(411)、固定座(412)、斜向卡块(413)和弹性件(414);
4.根据权利要求3所述的一种水下机器人的抗紊流测试装置,其特征在于,辅助控制装置(4)还包括复位组件(42),复位组件(42)包括控制片(421)、连接杆(422)和直线驱动器(423);
5.根据权利要求1所述的一种水下机器人的抗紊流测试装置,其特征在于,缸体(1)包括环形安装管(11),环形安装管(11)至少设有两个,多个环形安装管(11)沿轴线方向阵列分布,且相邻的环形安装管(11)密闭连接;
6.根据权利要求5所述的一种水下机器人的抗紊流测试装置,其特征在于,测试装置还包括调整装置(5),调整装置(5)包括支撑架(51)和旋转驱动组件(52);
7.根据权利要求6所述的一种水下机器人的抗紊流测试装置,其特征在于,旋转驱动组件(52)包括旋转驱动器(521)、转轴(522)、第一旋转齿轮(523)、第二旋转齿轮(524)和齿环(525);
8.根据权利要求5所述的一种水下机器人的抗紊流测试装置,其特征在于,缸体(1)还包括缓冲舱(12);
9.根据权利要求2所述的一种水下机器人的抗紊流测试装置,其特征在于,第二安装座(31)和缓冲板(332)上分别安装有第一压力传感器(322)和第二压力传感器(333);
10.根据权利要求3所述的一种水下机器人的抗紊流测试装置,其特征在于,第一安装座(22)上还安装有用于包裹棘齿条(411)的密封盒(222),密封盒(222)与第一安装座(22)密闭配合。
技术总结
本发明涉及机器人测试领域,具体是涉及一种水下机器人的抗紊流测试装置,包括缸体、紊流制造装置和检测装置;紊流制造装置包括端盖和第一安装座;第一安装座设置在缸体的内部;检测装置包括第二安装座和检测组件;第二安装座安装在缸体上,第一安装座设置在第二安装座上,多个第二安装座沿缸体的轴线中心对称设置;检测组件包括第一氮气弹簧,第一氮气弹簧安装在第二安装座上,且第一氮气弹簧的活塞杆与第一安装座连接。本发明实现了模拟水下紊流环境的功能,达到检测水下机器人在遇到紊流时的状态的效果,以便于操作人员观测和收集水下机器人在测试过程中的情况,解决了水下机器人在进行整机测试时实验数据的收集较为困难的问题。
技术研发人员:刘海钧,陈震峰,黄香朝
受保护的技术使用者:国家电投集团徐闻风力发电有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!