基于方位角扩展误差和紧凑度误差的跟踪关联的制作方法
背景技术:
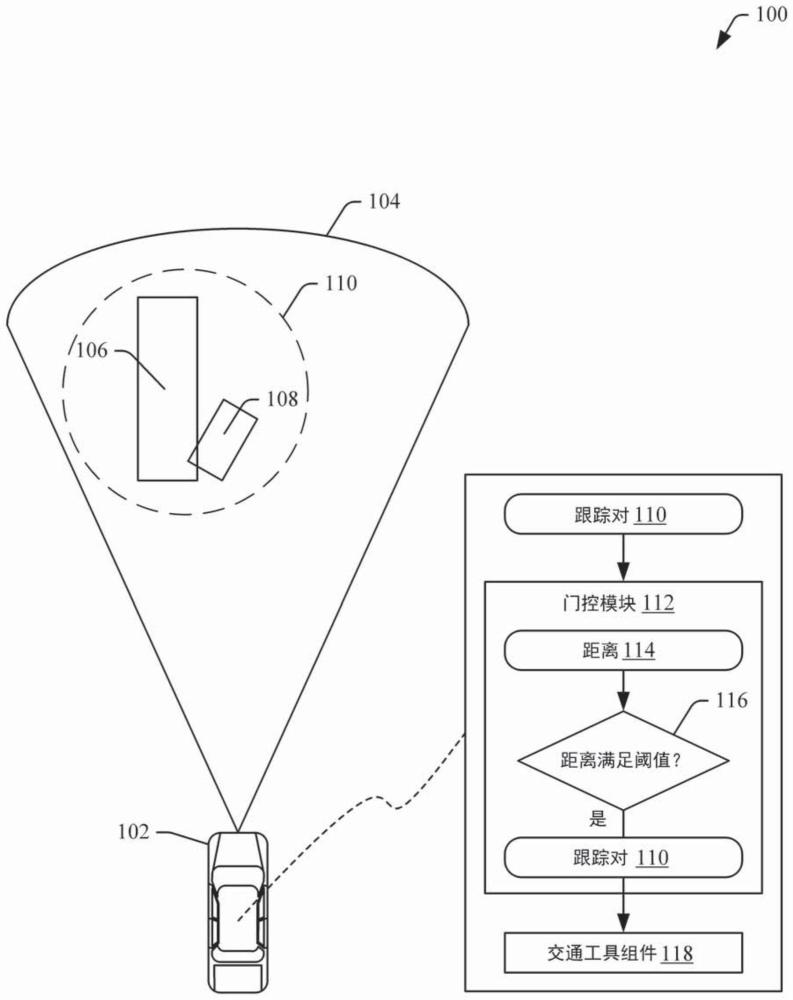
1、交通工具(vehicle)可以使用各种类型的传感器来跟踪交通工具附近的静止和移动对象(例如,其他交通工具、行人、动物、建筑物)。传感器(例如,相机、雷达传感器、lidar传感器)收集可以用于推断对象的位置、形状、速度、轨迹、类别和其他参数(例如,跟踪)的数据。杂乱的环境可能导致来自各种传感器的多个跟踪的生成。随着跟踪的生成,可以采取步骤将源自不同传感器的跟踪配对并关联到共同的对象(例如,相机跟踪与雷达跟踪)。由于存在许多不同的可能的跟踪关联或配对,将不同的跟踪正确地匹配或关联到共同的对象(例如,门控(gating))可能是困难的,尤其是对于扩展的和/或部分观察到的跟踪。
技术实现思路
1、本文档涉及用于实现基于方位角扩展误差和紧凑度误差的跟踪关联的系统、装置、技术和方法。这些系统和装置可以包括用于执行本文所述的技术和方法的组件或装置(例如,处理系统)。
2、以下描述的一些方面包括一种方法,该方法包括:由至少一个处理器接收包括第一对象的位置和覆盖区域(footprint)的第一跟踪;以及由处理器接收包括第二对象的位置和覆盖区域的第二跟踪。方法进一步包括:由处理器基于方位角扩展误差来确定第一跟踪和第二跟踪之间的方位角距离,方位角扩展误差与第一跟踪和第二跟踪之间相对于主交通工具的方位角展开(spread)相对应;以及由处理器基于紧凑度误差来确定第一跟踪和第二跟踪之间的位置距离,紧凑度误差与第一跟踪和第二跟踪之间的覆盖区域差相对应。方法还包括:由处理器并且根据基于方位角扩展误差的方位角距离和基于紧凑度误差的位置距离,确立第一对象和第二对象是否是共同的对象。
3、装置可以包括系统,系统包括至少一个处理器,至少一个处理器被配置成用于执行上述方法或其他方法。组件可以包括计算机可读介质(例如非瞬态存储介质),该计算机可读介质包括指令,该指令在由系统、另一系统或组件、或其组合执行时,实现上述方法和其他方法。本
技术实现要素:
介绍了用于实现基于方位角扩展误差和紧凑度误差的跟踪关联的简化概率,在具体实施方式和附图中进一步描述该简化概念。本发明内容并非旨在标识出要求保护的主题的必要特征,也并非旨在用于确定要求保护的主题的范围。
技术特征:
1.一种方法,所述方法包括:
2.如权利要求1所述的方法,进一步包括基于涵盖所述第一跟踪和所述第二跟踪的组合方位角范围来确定所述方位角扩展误差。
3.如权利要求2所述的方法,其特征在于,确定所述方位角扩展误差进一步基于所述第一跟踪的方位角范围和所述第二跟踪的方位角范围的总和。
4.如权利要求1所述的方法,进一步包括基于包围所述第一跟踪和所述第二跟踪的最小矩形面积来确定所述紧凑度误差。
5.如权利要求4所述的方法,其特征在于,确定所述紧凑度误差进一步基于所述第一跟踪的面积和所述第二跟踪的面积的总和。
6.如权利要求1所述的方法,其特征在于,所述方位角距离和所述位置距离是马氏距离。
7.如权利要求1所述的方法,进一步包括由所述处理器基于所述第一跟踪和所述第二跟踪的相应长度对所述方位角距离的分量进行加权。
8.如权利要求1所述的方法,进一步包括由所述处理器基于所述第一跟踪和所述第二跟踪的相应面积对所述位置距离的分量进行加权。
9.如权利要求1所述的方法,其特征在于,所述第一跟踪是雷达跟踪。
10.如权利要求1所述的方法,其特征在于,所述第二跟踪是视觉跟踪。
11.一种系统,所述系统包括:
12.如权利要求11所述的系统,其特征在于,所述方位角扩展误差基于:涵盖所述第一跟踪和所述第二跟踪的组合方位角范围;以及所述第一跟踪的方位角范围和所述第二跟踪的方位角范围的总和。
13.如权利要求11所述的系统,其特征在于,所述紧凑度误差基于:包围所述第一跟踪和所述第二跟踪的最小矩形面积;以及所述第一跟踪的面积和所述第二跟踪的面积的总和。
14.如权利要求11所述的系统,其特征在于,所述方位角距离和所述位置距离是马氏距离。
15.如权利要求11所述的系统,其特征在于,所述方位角距离具有基于所述第一跟踪和所述第二跟踪的相应长度进行加权的分量。
16.如权利要求11所述的系统,其特征在于,所述位置距离具有基于所述第一跟踪和所述第二跟踪的相应面积进行加权的分量。
17.如权利要求11所述的系统,其特征在于,所述第一跟踪是雷达跟踪。
18.如权利要求11所述的系统,其特征在于,所述第二跟踪是视觉跟踪。
19.如权利要求11所述的系统,进一步包括被配置成用于产生所述第一跟踪的雷达系统和被配置成用于产生所述第二跟踪的视觉系统。
20.一种计算机可读存储介质,所述计算机可读存储介质包括指令,所述指令在被执行时使至少一个处理器用于:
技术总结
本文的技术和系统实现了基于方位角扩展误差和紧凑度误差的跟踪关联。具体地,接收包括相应对象的相应位置和覆盖区域的第一跟踪和第二跟踪。方位角距离是基于方位角扩展误差来确定的,该方位角扩展误差与第一跟踪和第二跟踪之间相对于主交通工具的方位角展开相对应。还基于与第一跟踪和第二跟踪之间的覆盖区域差相对应的紧凑度误差来确定位置距离。基于方位角距离和位置距离,确立第一对象和第二对象是否是共同对象。通过这样做,当跟踪是扩展的(例如,非点目标)和/或部分观察到的(例如,跟踪不是整个对象的)时,系统可以更好地确定跟踪是否是共同对象的。
技术研发人员:S·A·伊姆兰,刘子鑫
受保护的技术使用者:安波福技术有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!