基于图像匹配的AUV水下辅助导航方法、系统、设备及介质
本发明涉及水下图像处理与组合导航,特别是涉及基于图像匹配的auv水下辅助导航方法、系统、设备及介质。
背景技术:
1、自主水下航行器(autonomous underwater vehicle,auv),作为无人水下航行器的一种,以其高自主性、智能性及强机动性的特点,成为当下海洋领域备受重视的技术之一。auv用途广泛,能够在人类难以涉足的复杂水下环境开展各类科研观测工作,依托于其能够脱离人工操纵、根据预设路线完成自主航行的能力,auv在深海与极地环境冰下区域中具有极大的应用优势。但现有技术中也存在一些缺点:
2、(1)当前侧扫声呐采集得到的数据文件常常需要使用某些商用软件才能直接打开,但这些软件不具备对图像进行任何实时预处理的功能,仅能将文件中的数据以瀑布图的形式进行直接展示,图像内存在大量噪声,并且具有较为严重的灰度衰减与几何畸变,不能反映真实地理环境信息,无法应用于实时侧扫声呐图像匹配中。
3、(2)侧扫声呐图像预处理方法复杂性较高,多以离线运行为主。侧扫声呐图像灰度校正常用的tvg、波束模型等方法较为依赖先验知识,往往需要根据实际环境及侧扫声呐硬件参数进行预先设置,应对不同环境的适应能力较差,难以满足高精度的实时水底地形特征还原的需求,导致图像特征不突出或产生畸变,进而降低图像匹配的稳定性,对侧扫声呐图像的辅助导航稳定性造成负面影响。
4、(3)常用于组合导航滤波的卡尔曼滤波(kalman filtering,kf)和扩展卡尔曼滤波(extended kalman filter,ekf)等方法都有一定的局限性。auv运动模型往往是非线性的,并且实际应用中常包含非高斯噪声,常规的kf、ekf方法处理非线性系统的效果都较为有限,无损卡尔曼滤波(unscented kalman filter,ukf)、粒子滤波(particle filter,pf)等方法虽然能够更好地适用于非线性系统,但ukf方法处理非高斯系统时的表现欠佳,pf方法则会因样本贫化问题而导致算法稳定性有所下滑。
5、(4)目前针对侧扫声呐图像的处理研究及相关的方法改进主要集中于针对侧扫声呐图像处理流程中的单一步骤,这些单一处理步骤的算法之间因参数设置及数据格式的衔接等问题而存在冲突,并且在实时处理及其与导航系统的数据融合过程中各部分算法间反复的数据传输也会降低处理效率,导致基于侧扫声呐图像的导航信息生成实时性不足,难以满足auv水下自主实时导航的需求。
6、因此,亟需一种auv水下辅助导航方案以解决上述问题。
技术实现思路
1、本发明提供一种基于图像匹配的auv水下辅助导航方法、系统、设备及介质,达到减小航位推算算法随时间累积的误差,避免环境突发影响导致测量噪声的系统误差不服从高斯分布进而影响定位精度的目的。
2、为达到上述目的,本发明第一方面提供一种基于图像匹配的auv水下辅助导航方法,包括:
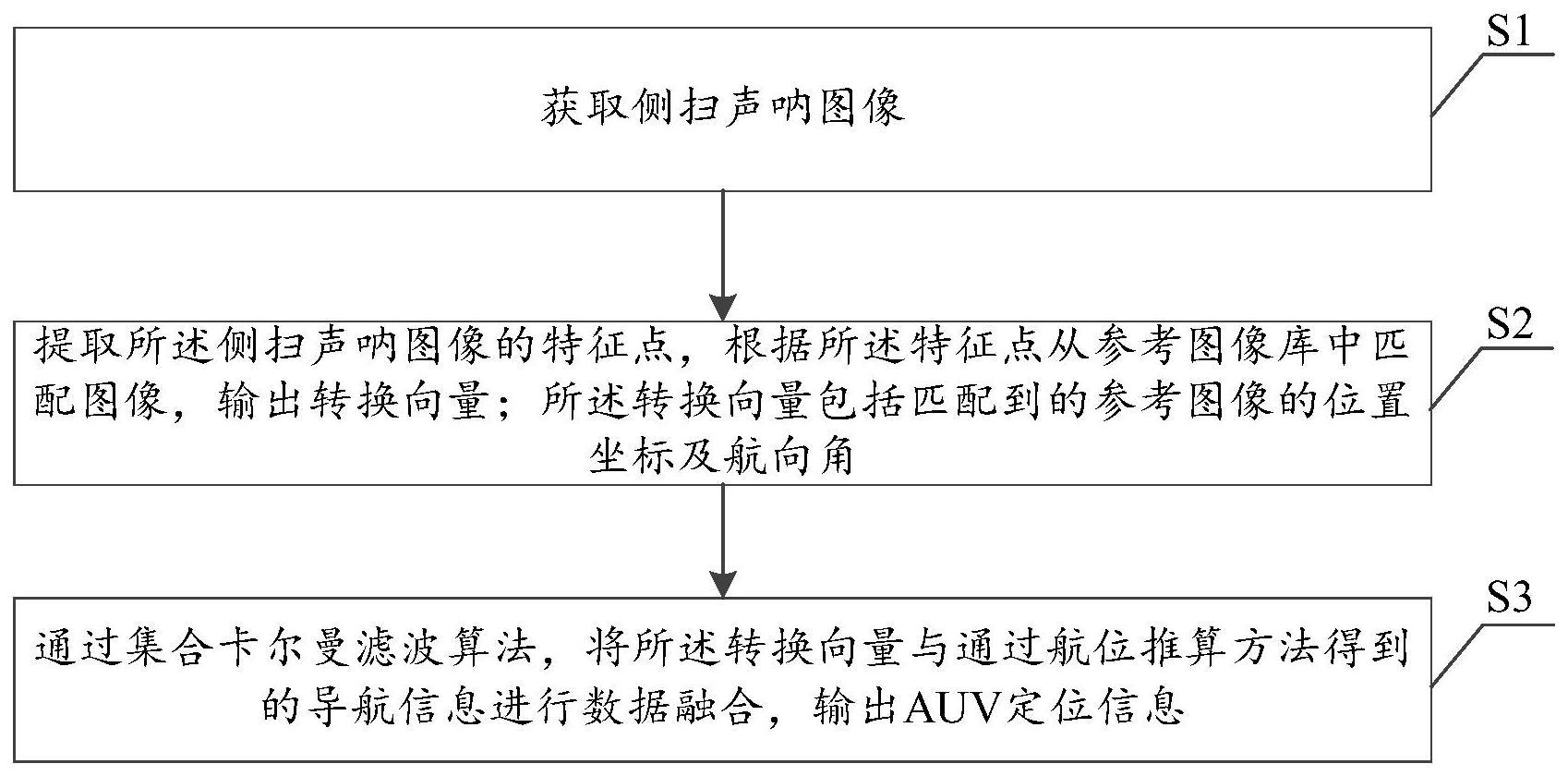
3、获取侧扫声呐图像;
4、提取所述侧扫声呐图像的特征点,根据所述特征点从参考图像库中匹配图像,输出转换向量;所述转换向量包括匹配到的参考图像的位置坐标及航向角;
5、通过集合卡尔曼滤波算法,将所述转换向量与通过航位推算方法得到的导航信息进行数据融合,输出auv定位信息。
6、进一步地,获取侧扫声呐图像,包括:
7、对侧扫声呐收集的图像数据文件进行解码,从中提取回波强度灰度图像;
8、通过均值滤波对所述回波强度灰度图像进行模糊处理;
9、根据预设阈值将模糊处理后的所述回波强度灰度图像中的像素点进行二值化处理,得到二值化图像;
10、通过canny边缘检测算法对所述二值化图像进行处理,得到海底线位置;
11、以所述海底线位置为边界,将平均灰度值较低的一侧像素点作为水柱区清除,并将左右舷侧扫声呐图像合并,得到所述侧扫声呐图像。
12、进一步地,还包括:
13、对侧扫声呐图像进行预处理;所述预处理包括灰度校正和几何校正;所述几何校正包括速度校正与斜距校正。
14、进一步地,灰度校正,包括以下步骤:
15、对所述侧扫声呐图像逐像素点添加tvg趋势项,将原有像素值与对应趋势项相乘进行粗补偿;
16、设置高斯卷积函数尺度,将加入tvg趋势项的像素点进行对数变换,得到所述侧扫声呐图像在对数域的反射图;
17、将所述反射图从对数域变换至实数域,得到灰度校正后的所述侧扫声呐图像。
18、进一步地,提取所述侧扫声呐图像的特征点,包括:
19、通过高斯卷积核对所述侧扫声呐图像进行高斯平滑、逐层降采样处理,并在全尺度空间上构建高斯差分金字塔;
20、在所述高斯差分金字塔上对局部极值点进行选取,去除不稳定的边缘响应点后,得到具有尺度不变、旋转不变的候选特征点;
21、在预设邻域窗口内对所述候选特征点的像素梯度模值及方向进行计算,生成梯度方向直方图,并将所述梯度方向直方图的峰值代表的方向作为对应候选特征点的主方向;
22、根据所述候选特征点的稳定程度进行关键点选取,并为每个关键点分配一个或多个局部梯度方向;
23、通过一组128维的特征向量对所述候选特征点的位置、尺度及方向进行描述,得到所述候选特征点对应的关键点的特征点描述子。
24、进一步地,根据所述特征点从参考图像库中匹配图像,输出转换向量,包括:
25、通过暴力匹配算法,将所述特征点对应的关键点与所述参考图像库中的关键点进行穷举匹配,并遍历计算每一对关键点向量之间的欧式距离,选取所述参考图像库中与当前所述特征点距离最小的关键点作为最佳匹配点,构成关键匹配对;
26、通过随机抽样一致算法对所述关键匹配对之间的转换向量进行遍历计算,将包含最多所述关键匹配对的转换向量,作为所述侧扫声呐图像与匹配到的所述参考图像之间的转换向量进行输出。
27、进一步地,通过集合卡尔曼滤波算法,将所述转换向量与通过航位推算方法得到的导航信息进行数据融合,输出auv定位信息,包括:
28、基于所述转换向量构建卡尔曼滤波状态方程与观测方程;
29、通过拉普拉斯分布函数,在所述卡尔曼滤波状态方程与观测方程的系统状态中,添加一系列叠加了随机扰动项的样本,得到状态向量集合;
30、计算所述状态向量集合的均值及误差协方差,将当前状态下的所述误差协方差代入卡尔曼增益计算公式中,得到本次迭代对应的卡尔曼增益值;
31、对所述导航信息对应的观测向量添加随机扰动项,生成观测集合,并计算所述观测集合的观测误差协方差;
32、在每次迭代时,将计算得到的所述观测误差协方差代入卡尔曼增益计算公式中,得到卡尔曼增益矩阵;
33、根据所述卡尔曼增益值和所述卡尔曼增益矩阵计算滤波融合结果,并将所述滤波融合结果作为所述auv定位信息输出。
34、本发明第二方面提供一种基于图像匹配的auv水下辅助导航系统,包括:
35、图像获取模块,用于获取侧扫声呐图像;
36、图像匹配模块,用于提取所述侧扫声呐图像的特征点,根据所述特征点从参考图像库中匹配图像,输出转换向量;所述转换向量包括匹配到的参考图像的位置坐标及航向角;
37、定位优化模块,用于通过集合卡尔曼滤波算法,将所述转换向量与通过航位推算方法得到的导航信息进行数据融合,输出auv定位信息。
38、本发明第三方面提供一种电子装置,包括处理器、存储器以及存储在所述存储器中且被配置为由所述处理器执行的计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面中任意一项所述的基于图像匹配的auv水下辅助导航方法。
39、本发明第四方面提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如上述第一方面中任意一项所述的基于图像匹配的auv水下辅助导航方法。
40、与现有技术相比,本发明实施例的有益效果在于:
41、本发明提供基于图像匹配的auv水下辅助导航方法、系统、设备及介质,基于集合卡尔曼滤波算法对航位推算信息与侧扫声呐图像配准信息进行数据融合,提高基于地理信息的auv定位精度,修正航位推算法随时间增长所累积的定位误差,相较于传统的水下导航定位方法具有更高的定位精度与稳定性。该方案还达到以下效果:
42、(1)将经过处理后的侧扫声呐图像信息用于组合导航系统的定位校正中,能够系统、流畅地对侧扫声呐图像数据进行预处理,具有足以满足导航算法要求的实时性与自主性的同时,有效减小了航位推算算法随时间累积的误差,提高了导航的精度;
43、(2)基于改进的canny边缘检测的二维海底线检测方法,利用海底线的灰度特征、对称性及连续性特征,能够有效减小高亮噪声点对海底线检测的影响,提高海底线提取的准确性;
44、(3)结合了tvg趋势项的retinex灰度校正方法能够在颜色恒定性、灰度动态范围压缩及边缘增强三方面达到平衡,在不依赖人为参数设定的情况下依据不同的运行环境较好地对图像进行增强,凸显真实地物特征,获得良好的校正结果,能为后续的图像匹配提供更为准确的信息,提升图像匹配的稳定性;
45、(4)开创性地将集合卡尔曼滤波(ensemble kalman filter,enkf)用作dvl、电子罗盘、侧扫声呐等传感器数据的数据融合算法,通过蒙特卡洛法计算预测误差协方差矩阵的方法,使得每次迭代中更新的误差协方差矩阵信息能够跟随状态向量集合被隐式地传递至下一次迭代中,有效减小了计算量与滤波器的存储负担。此外,依托于enkf采用一组每次更新步骤中都会改变的集合样本来表示系统模型的特点,能够适用于非高斯非线性模型中,避免环境突发影响导致测量噪声的系统误差不服从高斯分布进而影响定位精度的问题,具有较为良好的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!