在车辆辅助系统中确定物理环境的空闲空间边界的方法与流程
本公开涉及用于在车辆辅助系统中确定车辆周围的物理环境的空闲空间边界的计算机实现的方法、设备和计算机程序。此外,本公开还涉及包括上述设备的车辆。
背景技术:
1、如今,车辆(汽车、机器人、叉车、轮船等)时常由车辆辅助系统(例如,由高级驾驶辅助系统(adas))操作以向其驾驶员提供一定程度的驾驶辅助。然而,车辆辅助系统也可以能够半自主地或甚至完全自主地控制车辆。这要求车辆的车辆辅助系统具有足够对其周围环境的认识以意识到不可通行的区域,如墙壁、障碍物、其它车辆等,从而能够避免碰撞并允许车辆安全地导航通过其周围环境。为了能够可靠地区分不可通行区域和空闲空间,必须提供描述车辆周围的空闲空间和不可通行区域的模型。因此,通过处理传感器测量数据来建模以及估计当前局部环境对于车辆辅助系统是必要的。
2、一种常用类型的模型(由s.steyer、g.tanzmeister和d.wollherr在ieeetransactions on intelligent vehicles,vol.3,no.3,pp.384-396,sept.2018中的“grid-based environment estimation using evidential mapping and particletracking”中描述的)是由车辆的传感器(例如测距或测程传感器)提供的处理数据导出的环境的基于网格的表示。然而,由于表示局部环境所需的大量网格单元,在这种模型上执行的计算需要大量计算资源,这在嵌入在车辆中的车辆辅助系统中通常是受限的。另外,存储基于网格的模型需要大量的存储器。此外,如果在车辆之间共享模型或模型的部分,则必须例如通过车辆到车辆(v2v)通信接口来传送大量数据。
3、为了克服这些缺点,本领域已知的方法建议通过压缩技术改变网格本身。一个示例是在g.kraetzschmar、g.p.gassull和k.uhl在proc.of the 5th ifac/euron symposiumon intelligent autonomous vehicles,lisbon,portugal,jul 2004for 2d grids中的“probabilistic quadtrees for variable-resolution mapping of largeenvironments”中使用的公知的基于四叉树的方法。
4、另一种已知的方法是以参数形式对包含在网格中的信息进行编码,这进一步减少了所需的存储。然而,到现在为止,只有诸如道路边界(如由m.darms、m.komar和s.lüke在proc.of the ieee intelligent vehicles symposium,san diego,california,usa,jun2010中的“map based road boundary estimation”中建议的)或移动物体(图由t.-n.nguyen、m.-m.meinecke、m.tornow和b.michaelis在proc.of the ieee intelligentvehicles symposium,xi’an,shaanxi,china,jun 2009,pp.425–430中的“optimizedgrid-based environment perception in advanced driver assistance systems”中建议的)之类的功能特定信息已经从网格中提取并以压缩的参数方式表示。
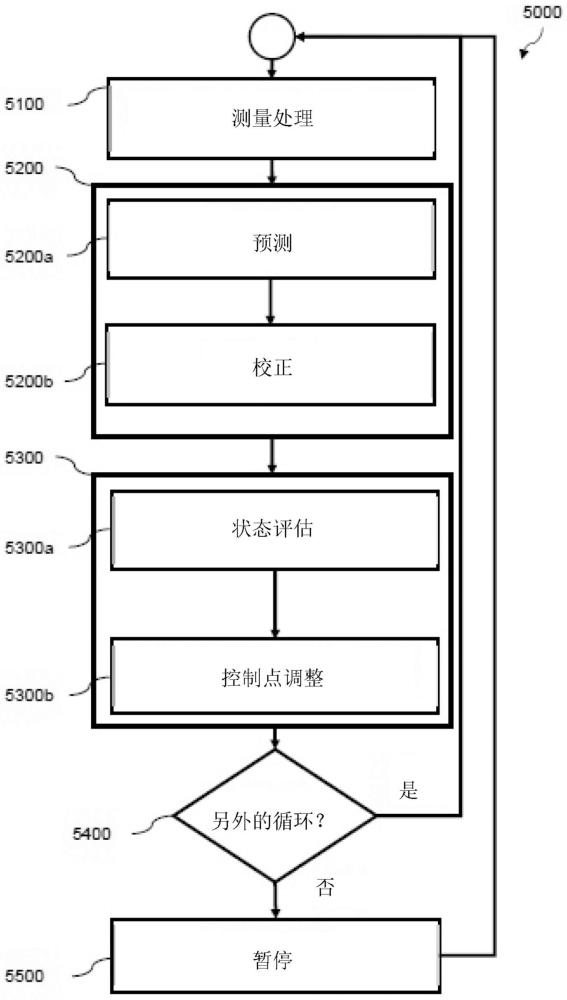
5、为了提供功能无关的通用映射表示,m.schreier、v.willert和j.adamy在2013ieee intelligent vehicles symposium(iv),2013,pp.938-944中的“from gridmaps to parametric free space maps—a highly compact,generic environmentrepresentation for adas”中提出了驾驶环境的高度压缩的通用表示,其被称为参数空闲空间(pfs)映射,其中空闲空间表示车辆的可通行空间。pfs映射是车辆周围的局部静态环境的连续的鸟瞰视图2d表示。这种pfs映射不是通过离散网格单元来模拟世界,而是通过参数形式的柔性和闭合曲线来描述空闲空间。所提出的算法基于传感器数据和相应的图像分析生成占用网格。网格的外部占据边界用作对闭合b样条曲线的控制点的递归估计的测量向量。根据新的环境测量值随时间跟踪和更新样条。建议固定数量的样条控制点,其中控制点沿着样条等距离地分布。结果,甚至复杂的静态环境也可以被足够精确地建模,同时与基于网格的表示相比减少了所需的存储量。
6、然而,由于沿着整个样条(例如,在样条的s域中)均匀分布的样条控制点的固定数量,导致控制点的数量与边界形状的局部复杂度不匹配。换言之,在边界的形状具有非常低的曲率的位置处可能使用了太多的控制点,而在边界的形状局部复杂的位置处可能使用了太少的控制点。因此,所得到的样条不能充分地匹配空闲空间的边界。此外,可能使用了大量不必要的控制点。
7、在yang等人的“control point adjustment for b-spline curveapproximation”(computer-aided design 36(2004)639–652)中,提出了一种用于b样条曲线近似的控制点调整的方法。该方法基于用于局部复杂度确定的参考曲线,以便增加近似的精确度。然而,对于未知/变化的环境,如对于大多数车辆辅助系统的情况,没有可用的参考曲线。
8、针对该背景,需要一种在车辆辅助系统中确定物理环境的空闲空间边界的方法,该方法减少了处理表示空闲空间边界的参数曲线所需的计算资源,同时至少保持了相对于真实世界空闲空间边界的形状和近似质量。
技术实现思路
1、上述问题至少部分地通过根据第一方面的计算机实现的方法、根据第二十方面的设备、根据第二十一方面的计算机程序以及根据第二十二方面的车辆来解决。
2、本发明的第一方面涉及一种在车辆辅助系统中确定车辆周围的物理环境的空闲空间边界的计算机实现的方法。该方法包括如下步骤:a.获得近似表示空闲空间边界的空间信息的参数曲线,其中,所述参数曲线由多个控制点定义;b.确定所述多个控制点中的控制点的形状复杂度指示符,所述形状复杂度指示符指示受所述控制点影响的所述参数曲线的一部分的形状复杂度;以及c.基于所述形状复杂度指示符修改受所述控制点影响的所述参数曲线的所述部分。
3、基于形状复杂度指示符修改受控制点影响的参数曲线的部分可产生更好地反映物理环境且因此更好地反映空闲空间边界的参数曲线。增加空闲空间边界的近似质量可以使车辆在空闲空间中更安全且更有效地四处移动。所述车辆可以是汽车、机器人、轮船、飞机或任何其它合适的运动装置。车辆辅助系统可以是半自主或完全自主驾驶系统、高级驾驶员辅助系统(adas)或可用于至少部分地影响车辆控制的任何其它合适的辅助系统。
4、根据第一方面中的第二方面,修改受控制点影响的参数曲线的部分包括以下各项中的至少一项:如果形状复杂度指示符指示高形状复杂度,则增加受控制点影响的参数曲线的部分中的控制点的量;如果形状复杂度指示符指示低形状复杂度,则减少受控制点影响的参数曲线的部分中的控制点的量。
5、增加具有高形状复杂度的部分中的控制点的量可以增加近似质量,而减少具有低形状复杂度的部分中的控制点的量可以减少用于处理和/或存储参数曲线的计算资源。
6、根据第二方面中的第三方面,增加控制点的量包括以下各项中的至少一项:在受控制点影响的参数曲线部分增加新的控制点;将所述多个控制点中的控制点从所述参数曲线的另一部分移动到受所述控制点影响的所述参数曲线的所述部分;和/或其中,减少控制点的量包括以下各项中的至少一项:从多个控制点中移除控制点;将控制点从参数曲线的所述部分移动到该参数曲线的另一部分;将所述控制点与所述参数曲线的所述部分内的多个控制点中的另一控制点合并。
7、根据第三方面中的第四方面,添加控制点还包括:在所述控制点与相邻控制点之间添加新的控制点。
8、为了改善近似质量,添加、移除、移动控制点或合并控制点可以允许调整参数曲线,使得控制点可以仅被放置在必要的地方以充分描述环境的空闲空间边界。通过添加控制点,可以优化具有高复杂度的参数曲线的部分以基本上匹配空闲空间边界的形状。通过移除或合并实现良好近似质量所不需要的控制点,可以减少存储参数曲线所需的存储器以及将其传输到其它车辆所需的带宽。移动(即,直接改变控制点的坐标以及重新定位控制点)可以增加该方法的效率,因为可以避免移除和添加新的控制点。
9、根据第三至第四方面中任一方面的第五方面,添加新的控制点的步骤包括:直接在控制点和后续控制点之间添加控制点,或者将与新的控制点相关联的信息添加到添加列表中;和/或其中,移除第一控制点的步骤包括:直接移除第一控制点,或将第一控制点添加到移除列表。
10、可以在两个控制点之间直接添加新的控制点,即,在确定要添加新的控制点之后。直接添加新的控制点可以具有增加该区域中的曲线的自由度的优点,这可以导致近似质量的增加。将与新的控制点相关联的信息添加到添加列表中可以降低复杂度,这是因为在完成对整个多个控制点的一次迭代之前索引不变。因此,在这样的整个迭代之后,将根据包括在添加列表中的添加信息来添加新的控制点。这可导致执行持续时间和所需计算资源的减少。相同的推理适用于直接移除控制点或将它们添加到移除列表的方面。然而,直接移除控制点可立即减少存储器消耗。
11、根据第一至第五方面中任一方面的第六方面,根据步骤b确定控制点的形状复杂度指示符包括以下各项中的至少一项:确定距离复杂度指示符包括:确定所述控制点与后续控制点之间的控制点距离;确定足点(footpoint)复杂度指示符包括:确定与所述控制点相对应的足点,以及确定所述足点与所述控制点之间的足点距离;确定角度复杂度指示符包括确定所述控制点、后继控制点和前一控制点之间的角度。
12、在确定受控制点影响的参数曲线的部分的复杂度时考虑至少一个方面(例如,距离复杂度、足点复杂度和/或角度复杂度)增加了所确定的形状复杂度指示符的准确度。因此,可以基于形状复杂度指示符做出关于如何修改受控制点影响的参数曲线的部分的更复杂的决定,这可以导致更高的近似质量或更少的存储器消耗,因为可以移除表示空闲空间边界不需要的一些控制点。
13、根据第六方面中的第七方面,确定距离复杂度指示符还包括:如果控制点距离低于或等于距离下限,则将所述距离复杂度指示符设置为根据距离复杂度下限的值,其中所述根据距离复杂度下限的值指示最低距离形状复杂度;如果控制点距离大于或等于距离上限,则将距离复杂度指示符设置为根据距离复杂度上限的值,其中所述根据距离复杂度上限的值指示最高距离形状复杂度;如果控制点距离大于所述距离下限并且小于所述距离上限,则将所述距离复杂度指示符设置为位于所述距离复杂度上限与所述距离复杂度下限之间的值,其中,位于所述距离复杂度上限与所述距离复杂度下限之间的值指示中间距离形状复杂度。
14、提供上述用于确定距离复杂度指示符的规则可以允许将距离值精确地映射到距离复杂度指示符的复杂度值。因此,指示符可以精确地指示由控制点之间的距离引入的复杂性。因此,可以做出关于如何基于形状复杂度指示符来修改受控制点影响的参数曲线的部分的更复杂的决定,这可以导致更高的近似质量或更少的所需存储器。
15、根据第六至第七方面中的第八方面,确定所述足点复杂度指示符还包括:如果足点距离低于或等于足点距离下限,则将足点复杂度指示符设置为根据足点距离复杂度下限的值,其中,所述根据足点距离复杂度下限的值指示最低足点形状复杂度;如果足点距离大于或等于足点距离上限,则将所述足点复杂度指示符设置为根据足点距离复杂度上限的值,其中,所述根据足点距离复杂度上限的值指示最高的足点形状复杂度;如果足点距离大于所述足点距离下限并且小于所述足点距离上限,则将所述足点复杂度指示符设置为位于所述足点距离复杂度下限与所述足点距离复杂度上限之间的值,其中位于所述足点距离复杂度下限与所述足点距离复杂度上限之间的值指示中间足点形状复杂度。
16、提供上述用于确定足点复杂度指示符的规则可允许将足点距离值准确映射到用于足点复杂度指示符的复杂度值。因此,指示符能够精确地指示由足点距离引入的复杂性。因此,可以做出关于如何基于形状复杂度指示符来修改受控制点影响的参数曲线的部分的更复杂的决定,这可以导致更高的近似质量或更少的所需存储器。
17、根据第六至第八方面中任一方面的第九方面,确定角度复杂度指示符还包括:如果角度小于或等于角度下限,则将角度复杂度指示符设置为根据角度复杂度下限的值,其中,所述根据角度复杂度下限的值指示最低角度形状复杂度;如果角度大于或等于角度上限,则将角度复杂度指示符设置为根据角度复杂度上限的值,其中,所述根据角度复杂度上限的值指示最高角度形状复杂度;如果角度大于所述角度下限并且小于所述角度上限,则将所述角度复杂度指示符设置为位于所述角度复杂度上限与所述角度复杂度下限之间的值,其中,所述位于所述角度复杂度上限与所述角度复杂度下限之间的值指示中间角度形状复杂度。
18、提供上述用于确定角度复杂度指示符的规则可以允许角度值到角度复杂度指示符的复杂度值的精确映射。因此,指示符可以精确地指示由控制点之间的角度引入的复杂性。因此,可以做出关于如何基于形状复杂度指示符来修改受控制点影响的参数曲线的部分的更复杂的决定,这可以导致更高的近似质量或更少的所需存储器。
19、根据第六至第九方面中任一方面的第十方面,确定对应于控制点的足点包括:确定控制点的s域值;基于控制点的所述s域值确定参数曲线的纵向1d表示中的足点的纵向值;基于控制点的所述s域值确定参数曲线的横向1d表示中的足点的横向值;根据所述纵向值和所述横向值将所述足点设置在所述参数曲线上的一位置处。
20、提供精确确定足点的位置(即,坐标)的方式可在确定足点距离方面提供增加的准确度。因此,相应的足点复杂度的精确度也会增加。
21、根据第六至第十方面中任一方面的第十一方面,确定所述形状复杂度还包括以下步骤:基于所述距离复杂度指示符、所述足点复杂度指示符和/或所述角度复杂度指示符来计算函数值;将所述函数值映射到具有复杂度下限和复杂度上限的值范围;其中,所述复杂度下限优选为-1,所述复杂度上限优选为1。
22、提供上述用于确定形状复杂度指示符的规则可以允许准确合并和映射相应角度、距离和/或足点距离复杂度指示符的单个值。因此,形状指示符可以精确地指示受控制点影响的参数曲线部分的整体复杂度。因此,可以做出关于如何基于形状复杂度指示符来修改受控制点影响的参数曲线的部分的更复杂的决定,这可以导致更高的近似质量或更少的所需存储器。
23、根据第一至第十一方面中任一方面的第十二方面,该方法包括:对于所述多个控制点中的每个控制点,重复步骤b和c。
24、在所述多个控制点的全部控制点上迭代并且评估是否必须修改受相应控制点影响的参数曲线的部分可以增加近似质量和/或减少用于存储参数曲线表示的存储器消耗。
25、根据前述方面中任一方面的第十三方面,所述方法还包括:在步骤b之前,基于测量数据确定状态指示符,该状态指示符指示是否需要控制点来定义参数曲线以表示空闲空间边界;以及如果所述状态指示符指示不需要所述控制点,则移除该控制点并跳过步骤b和c;或维持所述控制点。
26、为控制点提供附加的状态指示符可以导致参数曲线近似的执行效率增加。这是因为状态指示符提供关于控制点的附加上下文信息。状态指示符可以基于控制点的状态来指示是移除还是维持控制点。测量数据可以包括新接收的测量点、自上次状态更新以来的测量时间或与控制点的位置有关的信息(例如,控制点与车辆或位于车辆周围的预定区域之外的控制点之间的距离)。
27、根据第十三方面中的第十四方面,确定用于所述多个控制点中的控制点的状态指示符的步骤包括:从车辆的传感器接收测量点;确定所述测量点是否位于与所述控制点相关联的参数曲线支持区间内;如果确定所述测量点位于所述参数曲线支持区间内,则设置所述状态指示符以指示需要该控制点;如果确定测量点不在参数曲线支持区间内,则设置所述状态指示符以指示不需要该控制点。
28、根据第十四方面中的第十五方面,将状态指示符设置为指示不需要该控制点可以进一步取决于确定超过了自上次更新以来的时间阈值(time-since-last-updatethreshold)。
29、确定控制点是否受测量点影响(即,测量点是否位于相应的参数曲线支持区间内)增加了确定相应控制点的状态的准确性。因此,如果控制点受到影响,则该控制点的状态可以被设置为updated,这可导致状态指示符指示保持该点。如果不是,则该控制点的状态可被设置为coasted,这可导致(在超过自上次更新以来的时间阈值之后)状态指示符指示移除该点。
30、根据第十三至第十五方面中任一方面的第十六方面,确定所述多个控制点中的控制点的状态指示符的步骤包括:确定所述控制点与所述车辆之间的距离高于超范围阈值;和/或确定所述控制点位于所述车辆周围的预定区域之外;以及设置所述状态指示符以指示不需要该控制点。
31、这可以允许有效地确定控制点是否处于out-of-reach状态。如果控制点处于out-of-reach状态,则该控制点可被认为是定义表示空闲空间边界的参数曲线所不需要的。这是因为所述控制点可能涉及(例如,在安全或导航方面)不再与车辆辅助系统相关的物理环境的区域。因此,具有out-of-reach状态的控制点的状态指示符可以指示移除控制点并跳过步骤b和c。
32、根据第十三至第十六方面中任一方面的第十七方面,所述方法还包括以下步骤:对于多个控制点中的每个控制点,重复确定所述多个控制点中的控制点的状态指示符;如果状态指示符指示不需要该控制点,则移除该控制点并跳过步骤b和c;如果状态指示符指示需要该控制点,则保持该控制点并执行步骤b和c。
33、确定每个控制点的状态指示符可以增加所提出的方法的执行速度。这是因为在评估受控制点影响的参数曲线的部分的复杂度之前,可以基于状态指示符移除控制点。因此,可以减少形状复杂度指示符必须被确定的控制点的数量。
34、根据前述方面中任一方面的第十八方面,根据步骤a获得参数曲线包括:基于车辆的至少一个传感器的传感器数据来确定所述参数曲线;或从在工作上连接到车辆辅助系统的存储器接收所述参数曲线。
35、使用车辆的传感器数据来确定参数曲线是描述该车辆的物理环境的可靠数据源。因此,基于这样的数据确定的参数曲线可以实现高的近似质量。在已经确定了相应的参数曲线的情况下,从存储器接收它而不是重新确定它可能是有益的。从存储器接收参数曲线可以节省计算资源,例如存储器。
36、根据前述方面中任一方面的第十九方面,所述方法还包括:基于影响车辆辅助系统的一个功能的参数曲线来确定操作指令,其中,该功能优选地包括以下各项中的至少一项:在车辆的显示器上显示所述参数曲线;进行车辆路径规划;触发警告;在停车过程中影响车辆的控制。
37、在优化的参数曲线上确定的用于车辆辅助系统的操作指令可以增加系统效率和安全性。由于根据存储器消耗来优化参数曲线,因此可以更快地确定相应的操作指令。此外,由于高近似质量,确保并提高了系统/车辆安全性。
38、第二十方面涉及一种设备,该设备包括被配置为执行如上所述的方法的装置。
39、第二十一方面涉及一种包括指令的计算机程序,所述指令在由计算机执行时使所述计算机执行如上所述的方法。
40、第二十二方面涉及一种包括上述第二十方面的设备的车辆。
- 还没有人留言评论。精彩留言会获得点赞!