机器人调度方法、系统、设备以及路径拼接方法、机器人与流程
本发明属于机器人,尤其涉及一种机器人调度方法、系统、设备以及路径拼接方法、机器人。
背景技术:
1、随着计算机、传感器、智能控制等技术的快速更新和迭代,机器人产业呈现出前所未有的发展活力,各种新型智能机器人层出不穷,不仅为人类生活带来了便利,同时推动着各行各业的发展。
2、移动机器人作为工业机器人的重要发展分支,已经成为许多工业生产过程中不可替代的角色。在这些工业生产过程中,移动机器人最普遍的应用形式就是多移动机器人调度系统。在一些任务复杂度高或任务数量大的应用场合中,通过引用各种功能一样或不一样的多种移动机器人调度系统,以机器人群体作业的形式替换传统生产过程中的简单重复的人力劳动环节,不仅减少了企业人力资源的消耗,而且还提高了企业生产的效率与质量。其中,最典型一些多移动机器人调度系统,如政务机器人服务系统,货物分拣系统等。
3、多移动机器人调动系统,按机器人群体控制方式不一样,多机器人的任务分配主要分为集中式和分布式这两种。多数场景采用集中式控制方式,控制中心会根据各个机器人的状态信息以及任务信息,通过集中式任务分配算法计算出任务分配方案,再将任务分配每个机器人。对于功能不一样且拥有自主任务多机器人,集中式分配任务的方案就不适用了。
4、为了满足当前环境中功能不一的多移动机器人同时工作,但又不能出现发生碰撞风险,故有必要提出一种新的技术方案,以解决上述技术问题。
技术实现思路
1、本申请实施例的目的在于提供一种机器人调度方法,旨在解决满足当前环境中功能不一的多移动机器人同时工作,但又不能出现发生碰撞风险的问题。
2、本申请实施例是这样实现的,一种机器人调度方法,所述调度方法包括:
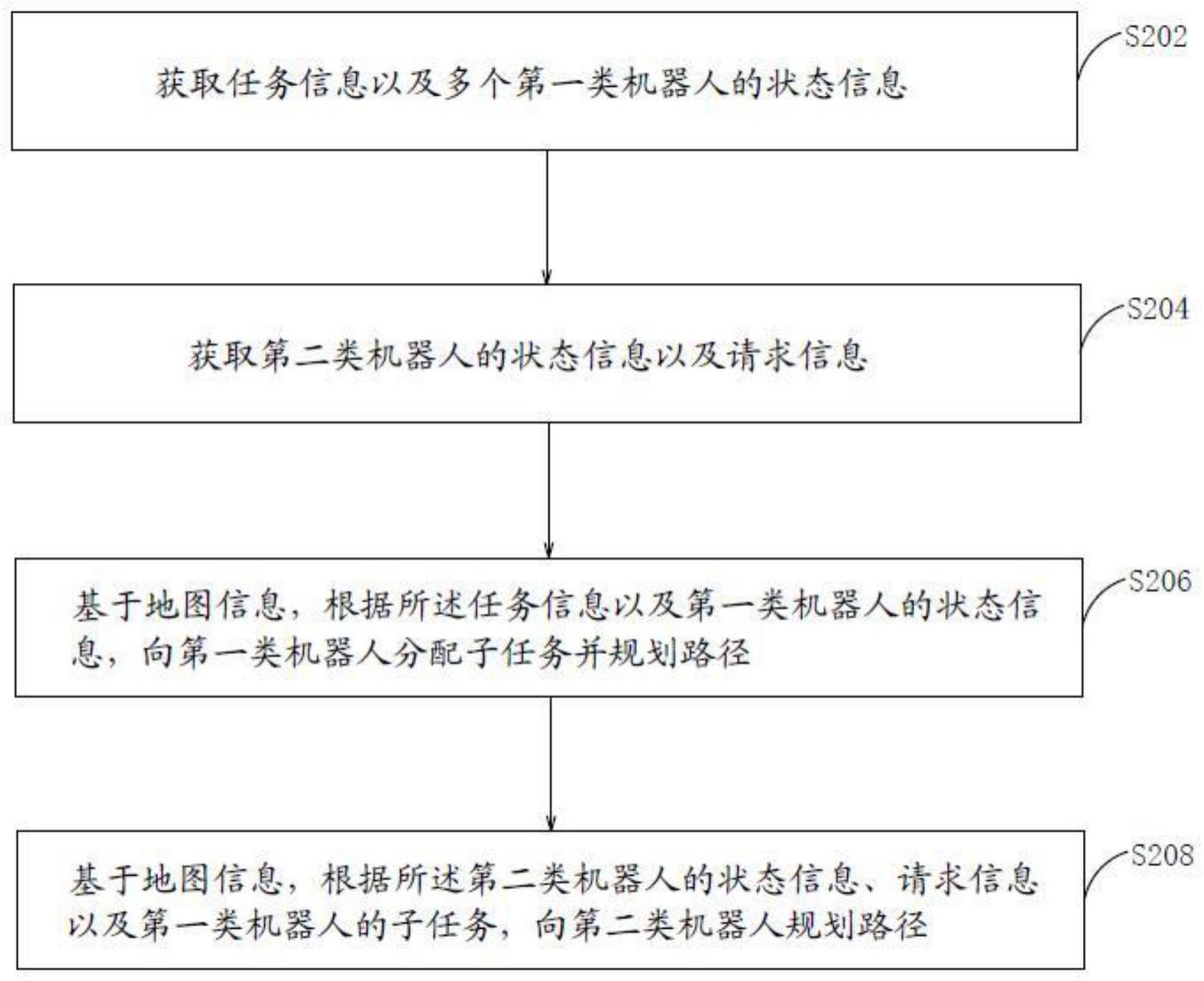
3、获取任务信息以及多个第一类机器人的状态信息,所述任务信息用于指示第一类机器人完成对应子任务;
4、获取第二类机器人的状态信息以及请求信息,所述请求信息用于请求管控区域的使用权限;所述第一类机器人与第二类机器人均为移动机器人;所述管控区域用于第二类机器人执行任务;
5、基于地图信息,根据所述任务信息以及第一类机器人的状态信息,向第一类机器人分配子任务并规划路径;
6、基于地图信息,根据所述第二类机器人的状态信息、请求信息以及第一类机器人的子任务,向第二类机器人规划路径。
7、本申请实施例的另一目的在于一种路径拼接方法,所述拼接方法包括:
8、接收所述机器人调度方法得到的前向路径;
9、基于bezier曲线二次公式法将多个前向路径拼接为单一路径;
10、当达到管控区域,基于dijkstra规划算法规划任务执行路径。。
11、本申请实施例的另一目的在于一种机器人调度系统,包括:
12、计算机设备,用于执行上述实施例所述的机器人调度方法;
13、多个第一类机器人,与管理端通信;以及
14、第二类机器人,与所述管理端通信,并用于执行如上述实施例提供的路径拼接方法;
15、其中,所述管理端向所述第二类机器人发送的前向路径为基于拓扑地图生成的路径,所述单一路径与任务执行路径为基于格栅地图生成的路径。
16、本申请实施例的另一目的在于一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行上述的一种机器人调度方法的步骤。
17、本申请实施例的另一目的在于一种机器人,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行上述的一种路径拼接方法的步骤。
18、本申请实施例提供的一种机器人调度方法,通过同时接收第一类机器人和第二类机器人的信息,且主要对第一类机器人进行任务分配以及路径规划,并同时兼容第二类机器人的任务执行,通过确定第二类机器人执行任务所需的管控区域,来确定管控区域的安全,并为第二类机器人规划路径,以使第二类机器人能够顺利到达管控区域;在不影响第一类机器人的任务执行的情况下,使第二类机器人能够顺利执行任务,防止碰撞。
技术特征:
1.一种机器人调度方法,其特征在于,所述调度方法包括:
2.根据权利要求1所述的一种机器人调度方法,其特征在于,所述基于地图信息,根据所述第二类机器人的状态信息、请求信息以及第一类机器人的子任务,向第二类机器人规划路径包括以下步骤:
3.根据权利要求2所述的一种机器人调度方法,其特征在于,所述向第二类机器人规划由当前位置到管控区域的路径包括以下步骤:
4.根据权利要求1所述的一种机器人调度方法,其特征在于,所述调度方法还包括以下步骤:
5.根据权利要求4所述的一种机器人调度方法,其特征在于,所述构建地图,并将第二类机器人执行任务所需的管控区域更新至地图中包括以下步骤:
6.根据权利要求1所述的一种机器人调度方法,其特征在于,所述第一类机器人为消杀机器人,所述第二类机器人为政务机器人。
7.一种路径拼接方法,其特征在于,所述拼接方法包括:
8.一种机器人调度系统,其特征在于,包括:
9.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行权利要求1至3中任一项权利要求所述的一种机器人调度方法的步骤。
10.一种机器人,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行权利要求7所述的一种路径拼接方法的步骤。
技术总结
本发明适用于机器人技术,提供了机器人调度方法、系统、设备以及路径拼接方法、机器人,所述调度方法包括:获取任务信息以及多个第一类机器人的状态信息,所述任务信息用于指示第一类机器人完成对应子任务;获取第二类机器人的状态信息以及请求信息;所述管控区域用于第二类机器人执行任务;基于地图信息,根据所述任务信息以及第一类机器人的状态信息,向第一类机器人分配子任务并规划路径;基于地图信息,根据所述第二类机器人的状态信息、请求信息以及第一类机器人的子任务,向第二类机器人规划路径。本申请能够使第二类机器人能够顺利到达管控区域;在不影响第一类机器人的任务执行的情况下,使第二类机器人能够顺利执行任务,防止碰撞。
技术研发人员:张亚磊,丁磊,陈放,柏晓乐
受保护的技术使用者:深圳市神州云海智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!