一种空地一体施工生态环境监测装置及可视化处理方法
本发明属于环境检测,尤其是一种空地一体施工生态环境监测装置及可视化处理方法。
背景技术:
1、随着我国城市化进程的不断推进,工程施工的需求和规模也越来越大,建筑工程行业市场未来发展可期,基于我国发展生态型社会的现状,绿色施工与可持续发展成为了必然的趋势。建筑工程施工应当在保障施工质量的同时,也要注重对生态环境的保护,如建筑施工的土方工程、拆除工程、灌注桩浇筑等工程,不仅会产生大量的施工粉尘排放入环境中,同时也可能对土壤造成污染;另一方面,由于机械施工等产生的污水及含油废水等会给周边水域带来污染。因此,传感器和物联网等新兴技术的快速发展,为施工生态环境进行全面监测提供了契机,为降低施工对生态环境的破坏提供了技术支撑,从而推动实现行业发展与环境保护的共同发展。
2、由于采集的海量数据不可避免地存在异常值、缺失值和噪声,会严重影响到统计分析和模型构建的效率,更可能会导致分析结果和模型的偏差,所以进行采集数据的处理十分必要。构建基于智能优化算法的数据处理方法使得对大数据的处理成为了可能,不仅可以提高数据处理的实效性,也能提高数据的精确性,为基于大数据的施工生态环境分析与研究提供数据源。
技术实现思路
1、本发明需要解决的技术问题是提供一种空地一体施工生态环境监测装置及可视化处理方法,该装置可应用于施工环境气象、扬尘、水质和土壤等多维度的立体监测,可以搭配微型无人机等移动设备,进行空间范围内的环境指标数据采集,具体监测指标包括温度、湿度、tsp、pmx、水质ph、总溶解固体(tds)土壤氮、磷、钾和电导率。
2、为实现上述目的,本发明所采用的技术方案是:
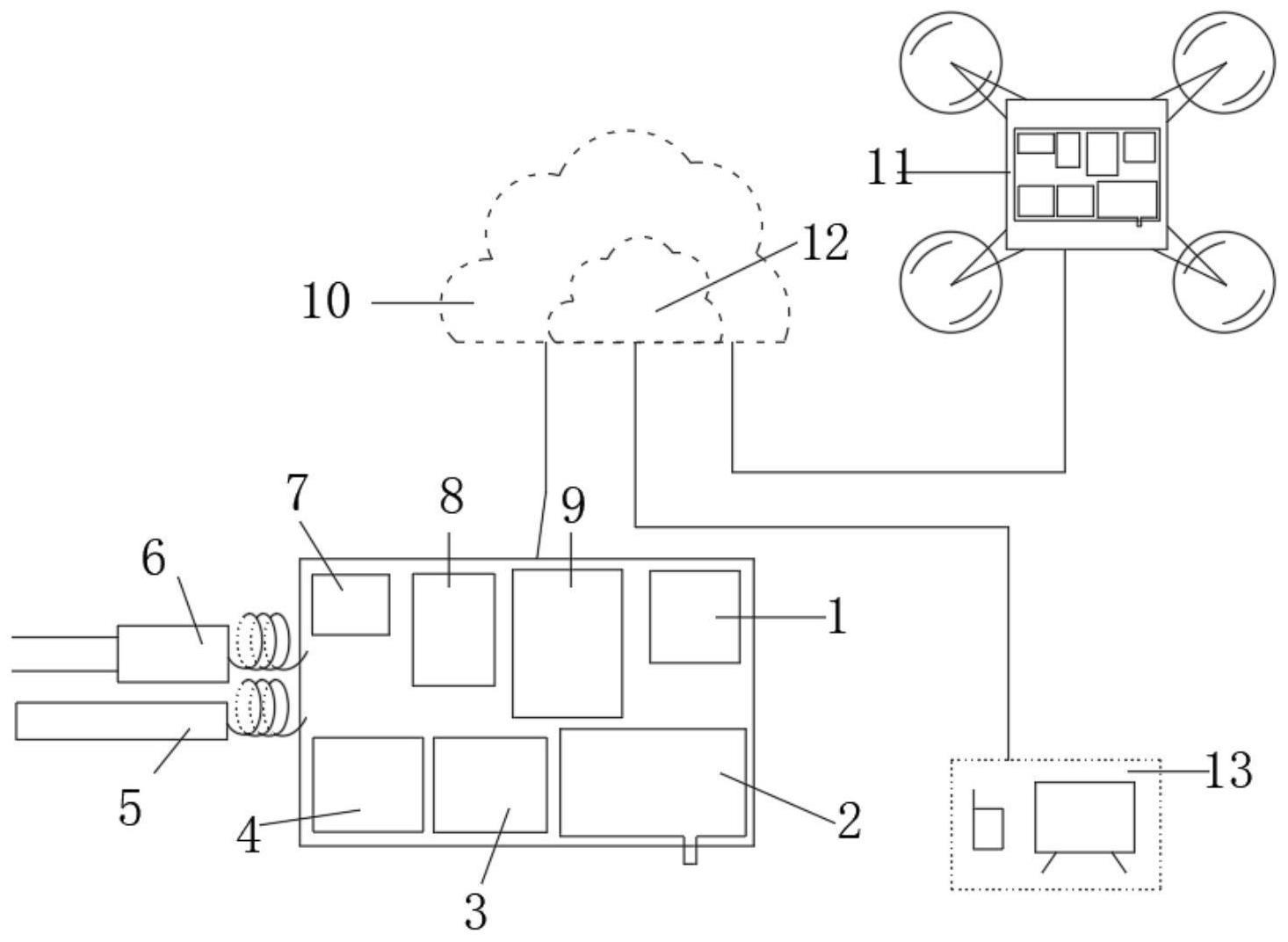
3、一种空地一体施工生态环境监测装置,包括stm32微控制器、扬尘数据采集模块、温湿度数据采集模块、北斗定位模块、水质数据采集模块、土壤数据采集模块、数据通信模块、物联网wifi模块、供电模块、云服务器模块、可视化系统模块和可视化终端、以及环境监测集成装置承载平台;所述环境监测集成装置承载平台包括微型无人机;扬尘数据采集模块包括tsp、pm1.0、pm2.5以及pm10的指标采集;温湿度数据采集模块包括温度和湿度的指标采集;北斗定位模块对采集点进行位置信息采集,水质数据采集模块包括ph和总溶解固体tds的指标采集;土壤数据采集模块包括氮、磷、钾和电导率的指标采集;数据通信模块为5g通信模组,负责无以太网及wifi网络环境下的数据传输;物联网wifi模块为esp8266物联网wifi芯片,负责无线网络环境下的数据传输;云服务器模块负责数据的云存储、处理以及可视化系统的部署;可视化终端包括手机、电脑以及大屏显示器,负责可视化经过处理后的数据。
4、本发明技术方案的进一步改进在于:扬尘数据采集模块包括扬尘传感器,温湿度数据采集模块包括温湿度传感器,水质数据采集模块包括水质传感器,水质传感器设置于待监测水域,土壤数据采集模块包括土壤传感器,土壤传感器设置于待监测土壤区域,监测集成装置还包括stm32控制板,通过集成开发的方式,实现数据采集指标包括tsp、pmx、水质ph和tds、土壤氮n、磷p、钾k和电导率g以及温度t和湿度h的多指标同步采集。
5、本发明技术方案的进一步改进在于:运用5g通信模组和物联网wifi芯片,可以实现网络自主选择和切换,解决了由于网络设施限制导致监测装置无法联网的问题,保障最优网络环境下的数据传输。
6、本发明技术方案的进一步改进在于:运用基于通信的云服务器模块可以实现快速通信功能,并将设备采集到的各项生态环境监测信息数据实时传输到云服务器中的数据库中,保障多维数据的同步性。
7、本发明技术方案的进一步改进在于:空地一体施工生态环境监测集成装置具有高度集成性,方便微型无人机搭载进行空间环境数据采集,从而实现空地一体的施工生态环境数据采集。
8、一种施工生态环境监测指标的可视化处理方法,包括以下步骤:
9、s1、通过空地一体施工生态环境监测装置获取到采集的原始数据集;
10、s2、基于莱茵达准则3σ进行异常值的判别和剔除,再通过均值法对由于异常值造成的空缺值以及采集过程出现的缺失值进行补充,得到初始数据集;
11、s3、运用白鲸算法bwo进行变分模态分解vmd的参数分解模态个数k和惩罚因子α优化,得出k和α组合参数的最优解;
12、s4、运用vmd对初始数据集进行降噪,得到采集数据的有效值,即处理数据集;
13、s5、将通过3σ-bwo-vmd方法进行处理得到的处理数据集进行数据可视化展示。
14、本发明技术方案的进一步改进在于:所述步骤s2具体包括:
15、首先对s1中的原始数据进行异常值筛选,根据莱茵达准则将异常值剔除,即将监测的误差绝对值超过三倍标准偏差的值进行剔除,并将其归类为缺失值;
16、
17、|vi|>3σ
18、式中xi为生态环境监测指标的第i次监测值,n为样本数量,为该指标算数平均值,σ(x)为标准偏差,vi为第i次监测值的误差;采用相邻数据均值进行填补,得到生态环境监测初始数据集。
19、本发明技术方案的进一步改进在于:所述步骤s3中vmd信号解析前需要设置合适的模态个数k和惩罚参数α,而依靠人工经验进行参数选择难度大、主观性强。通过bwo智能优化算法帮助个体跳出局部最优,同时改善收敛速度,求得模态个数k和惩罚因子α的最优组合解;
20、s31为求得vmd中的模态个数k和惩罚因子α,以包络熵作为适应度函数,构建最小包络熵为目标函数j:
21、
22、
23、式中,a(i)为各imf分量经希尔伯特解调后所得的包络信息;pi为a(i)的归一化形式;
24、s32设置k,α范围、种群规模和最大迭代次数,设置k和α为整数,k的范围为(0,10],α的范围为(0,3000],种群规模n设置为20,最大迭代次数d设置为100;
25、s33初始化种群,计算适应度函数值j0;
26、s34确定最佳个体和适应度,计算平衡因子bf和鲸落概率wf;
27、
28、
29、式中,bf为平衡因子,wf为鲸落概率,d为当前迭代次数,d为总迭代次数,bf>0.5时为勘探阶段,反之为开发阶段;
30、s35判断属于开发阶段还是勘探阶段,并根据相应阶段进行位置更新计算;其中,勘探阶段的位置更新公式为:
31、
32、
33、式中,和为第i条白鲸在k和α上的新位置,和xi,α为第i条白鲸在k和α上的当前位置,和为随机选择的白鲸的当前位置,r1和r2为(0,1)上的随机数;
34、其中,开发阶段的位置更新公式为:
35、
36、式中,和为第i条白鲸和随机选择的白鲸的当前位置,为最优白鲸的当前位置,r3和r4为(0,1)上的随机数,lf为levy飞行函数;
37、
38、式中,μ和υ为服从正态分布的随机数,β取值为1.5;
39、s36若平衡因子大于鲸落概率,则进行鲸落阶段位置更新计算,重新计算适应度值并确定最佳个体;反之,直接计算适应度值并确定最佳个体;
40、其中,鲸落阶段的位置更新公式为:
41、
42、
43、式中,xs为鲸落步长,h和l为k和α取值的上下界,r5、r6和r7为(0,1)上的随机数;
44、s37进行迭代,直至达到总迭代次数;
45、s38输出最优解k和α,和最优适应度值j。
46、本发明技术方案的进一步改进在于:所述步骤s4包括:
47、在上述最优解k和α基础上,对生态环境监测初始数据集运用vmd方法进行降噪处理,模态分解原理如下:将原始信号x(t)分解为k个imf分量,表达式为:
48、
49、
50、式中:k为分解层数;{uk}={u1,u2,…,uk}为k个imf分量;{ωk}为每个imf分量对应的中心频率;δ(t)为单位脉冲函数;j为虚数单位;*为卷积运算;
51、由于上述约束变分问题难以求解,引入惩罚因子α和拉格朗日乘子λ,得出迭代求解公式如下:
52、
53、
54、
55、s41初始化{λ1}和n为0;
56、s42 n=n+1,开始循环;
57、s43将上述最优解k和α带入迭代求解公式中,进行更新,直至分解个数达到k时停止内循环;
58、s44根据上述公式对λ进行更新;
59、s45设置迭代精度ε为1e-6,满足迭代精度后停止计算,判别公式如下,否则重复s42至s45步骤,直至达到最大迭代次数则停止循环;
60、
61、s46将k个imf分量求和,即得出经过3σ-bwo-vmd方法处理的生态环境监测处理数据集。
62、本发明技术方案的进一步改进在于:所述步骤s5中数据可视化展示为:
63、经过阿里云部署的b/s架构可视化系统,包含tsp、pmx、水质ph和tds、土壤氮n、磷p、钾k和电导率g以及温度t和湿度h的生态环境监测处理数据集可进行实时地、免受时空限制的可视化展示,为施工生态环境监测指标的数据展示和后续统计分析提供参考。
64、由于采用了上述技术方案,本发明取得的技术进步是:
65、本技术装置通过高精度传感器与stm32控制板的集成开发,充分利用物联网技术,应用5g通信模组与物联网wifi芯片,同时方便微型无人机承载,实现空地一体的施工生态环境监测效果。该装置具有高度集成、数据传输稳定的特点,可以实现数据的实时采集以及云端存储与处理,实现大数据的共享与可视化,为施工对生态环境的影响研究和决策提供数据参考。
- 还没有人留言评论。精彩留言会获得点赞!