一种基于磁场传感器阵列的表盘读数计算方法及装置与流程
本发明涉及基于磁场传感器与角度传感器、仪表刻度识别,尤其涉及一种基于磁场传感器阵列的表盘读数计算方法及装置。
背景技术:
1、在现代工业生产中,传统机械指针式仪表在温度、压力、流量等物理量检测和显示中仍广泛应用。这些仪表通常采用旋转指针来指示相应的物理量。
2、随着图像识别技术的发展,一些基于图像处理的方法被应用于角度测量。通过安装摄像头并采集指针表盘的图像,利用图像处理和识别算法来识别指针的位置并计算角度。然而,图像识别方法的实时性和精度在某些情况下仍存在一定的限制,尤其是在快速旋转和视觉偏移的情况下。因此,需要一种新的解决方案来克服传统轴上测量方法和图像识别方法的局限性,实现小角度范围内旋转角度的准确测量,并具备实时性和稳定性。
3、轴上磁场角度传感器方法是实现旋转角度测量的一种有效方法。该方法主要依赖于处于旋转轴中心的磁场源产生的激励信号,并通过固定于旋转轴中心的磁场角度传感器来获得旋转角度信息。然而,这种轴上测量方法在一些应用场景下存在局限性。如在专利cn107063310a和cn102445221a说明书中记载了基于轴心磁角度传感器的测量方法,当磁场角度传感器或磁场源未处于旋转中心时,磁角度传感器xy轴信号将失去相位差关系,并且产生波形失真,这种相位差和波形失真将导致实际测定角度存在误差。在实际应用中,基于中心磁场源的方法需要确保磁场源和磁场传感器的准确对准,在实际工况中可能会面临困难。其次,在小角度范围内,磁场角度传感器的输出信号可能缺乏极值,导致难以准确测量旋转角度。此外,对于快速旋转的情况,轴上测量方法也无法实现实时性的要求。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。
3、因此,本发明提供了一种基于磁场传感器阵列的表盘读数计算方法及装置,能够解决背景技术中提到的问题。
4、为解决上述技术问题,本发明提供如下技术方案,一种基于磁场传感器阵列的表盘读数计算方法,包括:
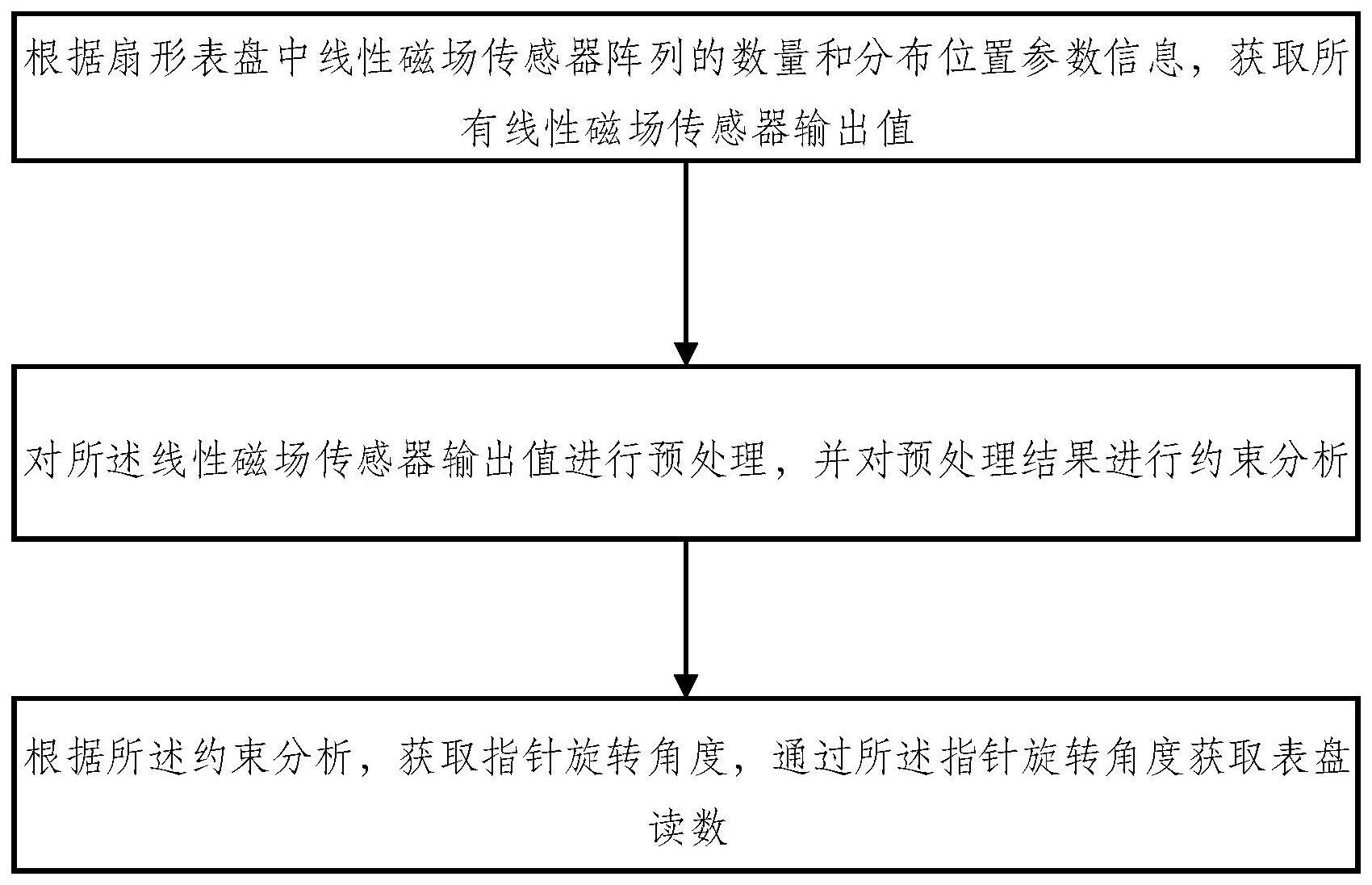
5、根据扇形表盘中线性磁场传感器阵列的数量和分布位置参数信息,获取所有线性磁场传感器输出值;
6、对所述线性磁场传感器输出值进行预处理,并对预处理结果进行约束分析;
7、根据所述约束分析,获取指针旋转角度,通过所述指针旋转角度获取表盘读数。
8、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:所述扇形表盘包括至少两组线性磁场传感器构成的阵列以及至少一个磁铁,记所述磁铁为长宽高分别为2a、2b和2c的长方体,其南北磁性垂直于ac面,即长高所在面,其南北磁性平行于旋转圆周切线,所述旋转圆周切线为指针旋转所形成的圆周的切线;
9、以ac面中心为原点建立空间直角坐标系,记该磁铁为磁密度为ρm的分布磁荷的空间叠加;
10、
11、其中,m0为剩余磁化强度,垂直于ac面均匀充磁,m0为常矢量,只有面磁荷存在,标量磁位ψm与面磁荷密度δm关系有:
12、
13、其中,ds为ac面的面积元,r为点p(x,y,z)到面积元ds距离,c为积分常数,s为永磁体边界面。
14、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:所述获取所有线性磁场传感器输出值包括,
15、点p(x,y,z)的磁场强度为:
16、
17、其中,hs+、hs-分别为正、负磁荷产生用磁场,r+、r-为正负磁荷的源点到场点p的距离。
18、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:所述获取所有线性磁场传感器输出值还包括,
19、
20、
21、
22、其中,hxs+、hys+、hzs+为s+面在点p(x,y,z)的ijk方向分量,令y=y-h求解s-面在点p(x,y,z)的ijk方向分量hxs-、hys-、hzs-的表达式。
23、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:所述对所述线性磁场传感器输出值进行预处理包括,
24、记传感器阵列元件各元件sn相对基准位置的圆心角为[θ0n]=[60°,135°],n为传感器个数,测量磁场传感器阵列的元件不加磁场时的静态偏置[v0n],测量永磁铁位于磁场传感器元件上方时该元件输出的绝对值的最大值[vmn];
25、以[vmn-v0n]为比例对该元件输出作去偏置最值归一化修正,修正后的输出[vn/(vmn-v0n)]存在相位上的差异;
26、将传感器阵列元件n去偏置最值归一化输出vn/(vmn-v0n)从大到小重新排列为vk=vk/(vmk-v0k),对应圆心角[θ0n]重新排列为[θ0k]。
27、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:所述对预处理结果进行约束分析包括,
28、圆心角按步长δ进行增加,依次求解归一化理论值vc(φ)=ht(φ)/ht_m对于相对误差绝对值满足|(vcn-vk)/vk|<ξ对应的φk(k≤n)或φ2n-k(n<k≤2n);
29、若不存在i使得θ≈θ0i-φi≈θ0k-φ2n-k,则增加δ步长,重新进行求解;
30、若存在i使得θ≈θ0i-φi≈θ0k-φ2n-k,则所求θ即为当前旋转角度。
31、作为本发明所述的基于磁场传感器阵列的表盘读数计算方法的一种优选方案,其中:在保持连续采样且采样频率f>2πωmax时,通过计算θ±1°对应的预测旋转方向;
32、当则减少δ步长求解归一化理论值vc(φ)=ht(φ)/ht_m对于相对误差绝对值满足|(vcn-vk)/vk|<ξ对应的φk(k≤n)或φ2n-k(n<k≤2n);
33、当则增加δ步长求解归一化理论值vc(φ)=ht(φ)/ht_m对于相对误差绝对值满足|(vcn-vk)/vk|<ξ对应的φk(k≤n)或φ2n-k(n<k≤2n)。
34、一种基于磁场传感器阵列的表盘读数计算装置,其特征在于:包括,
35、后端信号处理电路,所述后端信号处理电路用于对磁场传感器阵列的信号进行放大、滤波以及线性化处理,并提取角度信息;
36、至少两组线性磁场传感器构成的阵列,所述线性磁场传感器固定于扇形表盘上;
37、至少一个磁铁,所述磁铁相对于旋转轴进行转动,通过刚性结构安装于垂直旋转轴的旋转平面;
38、扇形表盘旋转轴、指针、刻度表盘与旋转轴的机械驱动装置。
39、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上所述的方法的步骤。
40、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述的方法的步骤。
41、本发明的有益效果:本发明提出一种基于磁场传感器阵列的表盘读数计算方法及装置,基于磁场传感器阵列,并提供相应的角度求解算法。该装置包括一个磁铁,通过刚性结构固定在旋转轴上,随轴作圆周运动。磁场传感器阵列元件分布在所测角度范围内的旋转圆周上,并且相邻元件的输出具有非零有效数据交集。通过对传感器阵列元件对磁场源激励的响应信号进行处理,可以构建实测数据集,并进行计算或优化实例,以求解小角度范围内的旋转角度。该装置及算法为实现高精度的扇形机械表盘指针读数提供了一种有效的解决方案。
- 还没有人留言评论。精彩留言会获得点赞!