车门开启过程的避障方法及装置与流程
本技术属于毫米波雷达传感器的目标检测,尤其涉及一种车门开启过程的避障方法及装置。
背景技术:
1、随着电动汽车行业迅速发展,用户对电动车门的智能化、安全性需求与日俱增。现有的电动车门能够自动开启或关闭,给用户带来方便体验的同时,也带来了一定风险。例如当车门附近存在障碍物时,由于车门自动开启过程中难以及时使车门停止,可能会与障碍物发生碰撞,会对车辆造成一定损伤,甚至威胁到乘客的人身安全。因此,有必要提出一种在车辆开启过程中避免车门与障碍物发生撞击的方法。
技术实现思路
1、本技术实施例提供一种车门开启过程的避障方法及装置,能够在车辆开启过程中避免车门与障碍物发生撞击。
2、第一方面,本技术实施例提供一种车门开启过程的避障方法,该方法可以包括:
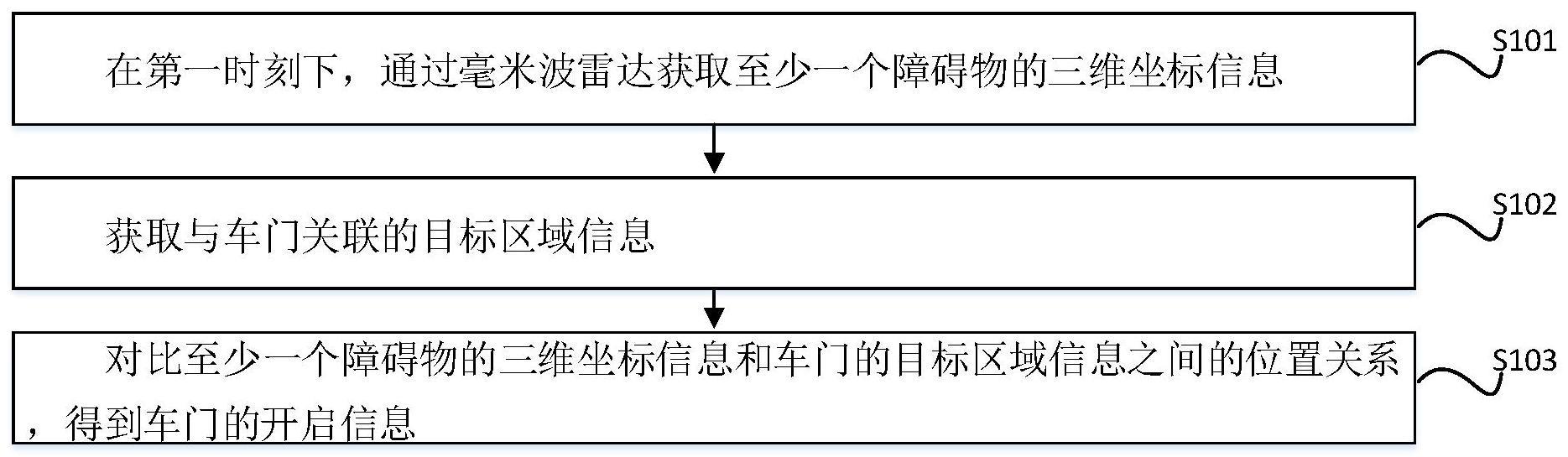
3、在第一时刻下,通过毫米波雷达获取至少一个障碍物的三维坐标信息,至少一个障碍物为在第一时刻下位于毫米波雷达的探测区域内的至少部分物体,
4、获取与车门关联的目标区域信息,目标区域信息用于指示车门在开启过程中其运动轨迹所覆盖的区域,
5、对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到车门的开启信息,开启信息用于控制车门停止开启。
6、在其中一个实施例中,上述涉及到的第一时刻为车门处于未开启状态的时刻,
7、对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到车门的开启信息,包括:
8、对比至少一个障碍物的三维坐标信息和第一区域位置信息之间的位置关系,得到第一比较结果,第一比较结果用于指示至少一个障碍物是否位于第一区域中,第一区域位置信息用于指示第一区域覆盖的范围,第一区域为车门在开启过程中其运动轨迹所覆盖的区域中的部分区域,
9、在第一比较结果指示至少一个障碍物非位于第一区域中的情况下,对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到第二比较结果,第二比较结果用于指示至少一个障碍物是否位于车门在开启过程中其运动轨迹所覆盖的区域中,
10、根据第一比较结果和/或第二比较结果,得到车门的开启信息。
11、在其中一个实施例中,上述涉及到的根据第一比较结果和/或第二比较结果,得到车门的开启信息,包括:
12、在第一比较结果指示至少一个障碍物位于第一区域中的情况下,将第一信息确定为车门的开启信息,第一信息用于控制车门不可开启。
13、在其中一个实施例中,上述涉及到的根据第一比较结果和/或第二比较结果,得到车门的开启信息,包括:
14、在第一比较结果指示至少一个障碍物非位于第一区域中,且第二比较结果指示至少一个障碍物位于车门在开启过程中其运动轨迹所覆盖的区域中的情况下,根据至少一个障碍物的三维坐标信息和第一区域位置信息之间的位置关系,计算得到第一角度,第一角度为车门可开启的角度,
15、基于第一角度,将第二信息确定为车门的开启信息,第二信息用于在第二时刻下车门的开启角度为第一角度后控制车门停止开启,第二时刻为在第一时刻之后的时刻。
16、在其中一个实施例中,上述涉及到的第一时刻为车门处于已开启状态的时刻,
17、对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到车门的开启信息,包括:
18、对比至少一个障碍物的三维坐标信息和第二区域位置信息之间的位置关系,得到第三比较结果,第一比较结果用于指示至少一个障碍物是否位于第二区域中,第二区域位置信息用于指示第二区域覆盖的范围,第二区域为车门在开启过程中其运动轨迹所覆盖的区域中的部分区域,
19、在第三比较结果指示至少一个障碍物非位于第二区域中的情况下,对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到第四比较结果,第四比较结果用于指示至少一个障碍物是否位于车门在开启过程中其运动轨迹所覆盖的区域中,
20、根据第三比较结果和/或第四比较结果,得到车门的开启信息。
21、在其中一个实施例中,上述涉及到的根据第三比较结果和/或第四比较结果,得到车门的开启信息,包括:
22、在第三比较结果指示至少一个障碍物位于第二区域中的情况下,将第三信息确定为车门的开启信息,第三信息用于控制车门停止开启。
23、在其中一个实施例中,上述涉及到的根据第三比较结果和/或第四比较结果,得到车门的开启信息,包括:
24、在第三比较结果指示至少一个障碍物非位于第二区域中,且第四比较结果指示至少一个障碍物位于车门在开启过程中其运动轨迹所覆盖的区域中的情况下,根据至少一个障碍物的三维坐标信息和第二区域位置信息之间的位置关系,计算得到第二角度,第二角度为车门可开启的角度,
25、基于第二角度,将第四信息确定为车门的开启信息,第四信息用于在第二时刻下车门的开启角度为第二角度后控制车门停止开启,第二时刻为在第一时刻之后的时刻。
26、在其中一个实施例中,上述涉及到的通过毫米波雷达获取至少一个障碍物的三维坐标信息,包括:
27、通过毫米波雷达采集至少一个障碍物的雷达回波信息,以及获取毫米波雷达的位置信息,毫米波雷达的位置信息用于指示毫米波雷达所处的空间位置坐标,
28、对至少一个障碍物的雷达回波信息进行信号处理,得到至少一个目标点云信息,目标点云信息用于指示障碍物的三维位置信息,
29、基于毫米波雷达的位置信息,对至少一个目标点云信息进行筛选,确定至少一个有效点云信息,
30、对至少一个有效点云信息进行点云聚类、跟踪处理和加权平均滤波处理,得到至少一个障碍物的三维坐标信息。
31、在其中一个实施例中,上述涉及到的加权平均滤波处理包括:
32、基于计算公式对至少一个有效点云信息进行加权平均滤波,计算公式包括:
33、zk=αzmeas+βzk-1
34、其中,zk为第k时刻下的z值,k为大于1的整数,z值为目标方向的坐标值,zmeas为聚类体核心点的z值,zk-1为第k-1时刻下的z值,聚类体核心点为点云聚类的聚类体中距离最小的点。
35、第二方面,本技术实施例提供一种车门开启过程的避障装置,该装置可以包括:
36、第一获取模块,用于在第一时刻下,通过毫米波雷达获取至少一个障碍物的三维坐标信息,至少一个障碍物为在第一时刻下位于毫米波雷达的探测区域内的至少部分物体,
37、第二获取模块,用于获取与车门关联的目标区域信息,目标区域信息用于指示车门在开启过程中其运动轨迹所覆盖的区域,
38、对比模块,用于对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到车门的开启信息,开启信息用于控制车门停止开启。
39、第三方面,本技术实施例提供了一种电子设备,设备包括:
40、处理器;
41、用于存储处理器可执行指令的存储器;
42、其中,处理器被配置为执行指令,以实现如第一方面的任一项实施例中所示的车门开启过程的避障方法。
43、第四方面,本技术实施例提供了一种计算机存储介质,该计算机可读存储介质上存储计算机程序,计算机程序被处理器执行时实现如第一方面的任一项实施例中所示的车门开启过程的避障方法。
44、第五方面,本技术实施例还提供了一种计算机程序产品,该计算机程序产品包括计算机程序,该计算机程序存储在可读存储介质中,设备的至少一个处理器从存储介质读取并执行计算机程序,使得设备执行第一方面的任一项实施例中所示的车门开启过程的避障方法。
45、本技术实施例提供了一种车门开启过程的避障方法及装置,相较于现有技术,本技术具有以下有益效果:
46、本技术实施例的一种车门开启过程的避障方法及装置,在第一时刻下,通过毫米波雷达获取至少一个障碍物的三维坐标信息,以及获取与车门关联的目标区域信息,并且对比至少一个障碍物的三维坐标信息和车门的目标区域信息之间的位置关系,得到车门的开启信息。
47、由此,通过对比至少一个障碍物的三维坐标信息和车门的目标区域信息,确定车门开启过程中其运动轨迹所覆盖的区域中是否存在障碍物,确定车门是否停止开启或可开启的角度,如此,能够在车门开启过程中避免车门与障碍物发生碰撞。
- 还没有人留言评论。精彩留言会获得点赞!