一种设备倾斜变形的监测装置及方法与流程
本发明属于输发电铁塔监测领域,具体涉及一种设备倾斜变形的监测装置及方法,尤其涉及一种风电塔筒及大型输电铁塔倾斜变形的监测方法及装置。
背景技术:
1、在风力发电系统中,塔筒起着支撑、保护风力发电机组及相关设备的重要作用,塔筒的安全是整个风力发电系统安全运行的基础;大型输电杆塔是电网高压输电动脉中的关键基础设备,电力塔筒在运行的过程中因气象或地质等因素影响,会发生摆动、倾斜等现象,监测电力塔筒的摆幅、倾斜角度等状态信息是获取电力塔筒运行是否安全的关键手段。目前常见的工程安全监测设计及应用中,用于监测风力发电塔塔筒摆动及倾斜的方法一般是在塔筒顶部布设测斜仪和加速度计,有条件的会沿塔筒内壁自下往上再布设一定数量的测斜仪(倾角计)及及加速度计,输电杆塔的监测应用也类似。
2、如果沿塔筒内壁自下往上布设有多个测斜点,并假设相邻测斜仪之间的塔筒段是完全刚性的,不存在折弯现象,则可以结合相邻测点之间的间距(标距),逐步计算并勾画出沿各测斜仪所在塔筒位置的变形曲线;如果只在塔顶顶部安装测斜仪,则只能忽略塔筒筒体的弯曲形变。加速度计一方面可以测量所在安装部位的振动信息,通过二次积分,理论上还可以获得该部位的动态位移信息。
3、基于现有方法,如果需要比较准确的测得塔筒筒体的倾斜变形,则需要沿塔筒内壁自下而上布设比较多的测斜仪(一般间隔2米左右)。随着测斜仪的增多,一方面监测设备费用增多,安装难度、作业风险及工作量同步增加,在计算塔筒的倾斜变形时,还存在测点的累计误差及无法考虑测点间隔内塔筒弯曲变形等因素影响,最终获得的塔筒整体形变数据与其真实形变往往存在较大差别。另外,在通过测量加速度从而获取塔筒的动态位移时,因为需要进行二次积分,在现有技术条件下,受传感器漂移、采样速率受限、测量精度有限等因素制约,工程应用时,测量数据与塔筒的实际动态位移之间往往存在较大差距。
技术实现思路
1、针对上述问题,本发明提出一种设备倾斜变形的监测装置及方法,能够实现从外部直接测量设备(如风电塔筒及大型输电铁塔等)的整体摆幅及倾斜变形。
2、为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
3、第一方面,本发明提供了一种设备倾斜变形的监测装置,包括第一安装台、第二安装台、辅助定位件、第一测距仪、第二测距仪、测斜仪和处理器;
4、所述第二安装台位于所述第一安装台上方,二者分别用于与待测设备的顶端和底部平台垂直相连;
5、所述辅助定位件和第一测距仪均设于所述第一安装台上靠近第二安装台的一侧,所述辅助定位件的轴向横截面呈现v型,且v型口朝向所述第二安装台;所述第一测距仪产生的测距信号垂直于所述第一安装台;
6、所述第二测距仪和测斜仪均设于所述第二安装台上靠近第一安装台的一侧,所述第二测距仪产生的测距信号垂直于所述第二安装台;
7、所述第一测距仪、第二测距仪和测斜仪的输出端均与所述处理器的输入端相连,所述处理器基于所述第一测距仪、第二测距仪和测斜仪的输出信号,完成设备倾斜变形监测。
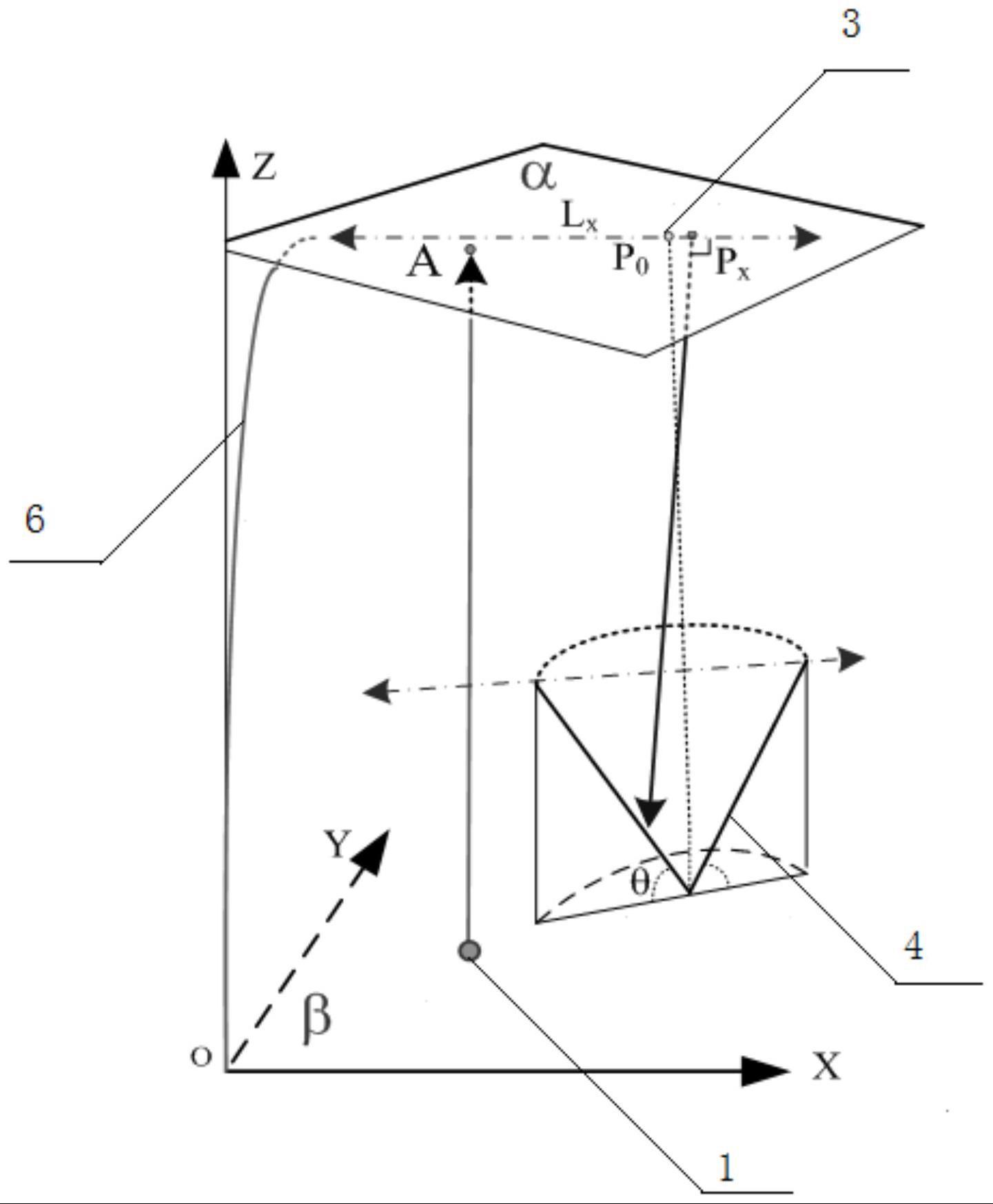
8、可选地,所述辅助定位件的内侧反射面呈圆锥状,过第二测距仪产生的测距信号中心线及辅助定位件锥顶的垂直截面与辅助定位件的内侧反射面相截后形成2条相交斜线,该2条斜线呈“v”字形状,定义该2条斜线为斜线l1和斜线l2,斜线l1和斜线l2与第一安装台的表面之间的夹角为θ。
9、可选地,所述第一安装台设置在水平面上,定义其表平面为水平面β;当设备未发生倾斜变形时,所述第二安装台与第一安装台平行,定义其表平面为平面α;
10、所述第一测距仪在水平面β内的安装坐标已知,其激光束垂直向上照射第二安装台形成激光反射靶点a,第一测距仪输出发射点与反射靶点之间的距离至处理器,经处理器测算得到位于平面α内的激光反射靶点a的空间坐标(x0,y0,z0);
11、所述测斜仪输出测值至处理器;
12、所述处理器基于测值计算出平面α的空间向量并基于平面α内不同于激光反射靶点a的任一点p的空间坐标(x,y,z),计算出根据得到平面α的点-法式方程:a(x-x0)+b(y-y0)+c(z-z0)=0;
13、基于平面α的点-法式方程,以及辅助定位件中心点的安装坐标,求得穿过辅助定位件中心位置垂直向上的直线与平面α的交点p0的空间坐标(x0',y0',z0');
14、所述第二测距仪安装在p0处。
15、可选地,当设备发生倾斜变形后,所述第二测距仪移动到px点,空间坐标变为(x',y',z'),定义平面α内穿过p0、px的直线lx,直线lx指示了设备沿该直线发生倾斜后的移动轨迹;
16、所述测斜仪输出测值至处理器,所述处理器基于测斜仪输出的测值计算出直线lx的方向矢量
17、根据获得直线lx的方程为:
18、可选地,当设备沿直线lx方向发生倾斜时,所述第二测距仪测得其当前位置到辅助定位装件反射面的距离为pxpt,其中pt为第二测距仪发射的测量激光在辅助定位件反射面上的靶点;
19、所述处理器通过测斜仪测量值计算出直线lx与水平平面之间的夹角γ;
20、在直角三角形rtδcxpxpt中,pxpt⊥lx,∠pxcxpt=α=θ-γ,θ为辅助定位件反射面与水平面β之间的夹角;cx为直线lx与辅助定位件反射面上的斜线l1或斜线l2的延长线的交点,由基于直线lx的方程和斜线l1或斜线l2的方程求得;
21、由cxpx=pxpt*cotα,计算出px点的空间位置,根据第二测距仪与设备顶端之间的固定位置关系,求算出设备顶端最终的实际变形位移。
22、可选地,所述第一测距仪和第二测距仪均为激光测距仪。
23、第二方面,本发明提供了一种基于第一方面所述的设备倾斜变形的监测装置的监测方法,包括:
24、将第一测距仪、第二测距仪和测斜仪的输出信号发送至所述处理器;
25、利用所述处理器基于所述第一测距仪、第二测距仪和测斜仪的输出信号,完成设备倾斜变形监测。
26、可选地,所述辅助定位件的内侧反射面呈圆锥状,过第二测距仪产生的测距信号中心线及辅助定位件锥顶的垂直截面与辅助定位件的内侧反射面相截后形成2条相交斜线,该2条斜线呈“v”字形状,定义该2条斜线为斜线l1和斜线l2,斜线l1和斜线l2与第一安装台的表面之间的夹角为θ;
27、所述第一安装台设置在水平面上,定义其表平面为水平面β;当设备未发生倾斜变形时,所述第二安装台与第一安装台平行,定义其表平面为平面α;
28、所述第一测距仪在水平面β内的安装坐标已知,其激光束垂直向上照射第二安装台形成激光反射靶点a,第一测距仪输出发射点与反射靶点之间的距离至处理器,经处理器测算得到位于平面α内的激光反射靶点a的空间坐标(x0,y0,z0);
29、所述测斜仪输出测值至处理器;
30、所述处理器基于测值计算出平面α的空间向量并基于平面α内不同于激光反射靶点a的任一点p的空间坐标(x,y,z),计算出根据得到平面α的点-法式方程:a(x-x0)+b(y-y0)+c(z-z0)=0;
31、基于平面α的点-法式方程,以及辅助定位件中心点的安装坐标,求得穿过辅助定位件中心位置垂直向上的直线与平面α的交点p0的空间坐标(x0',y0',z0');
32、所述第二测距仪安装在p0处。
33、可选地,当设备发生倾斜变形后,所述第二测距仪移动到px点,空间坐标变为(x',y',z'),定义平面α内穿过p0、px的直线lx,直线lx指示了设备沿该直线发生倾斜后的移动轨迹;
34、所述测斜仪输出测值至处理器,所述处理器基于测斜仪输出的测值计算出直线lx的方向矢量
35、根据获得直线lx的方程为:
36、可选地,当设备沿直线lx方向发生倾斜时,所述第二测距仪测得其当前位置到辅助定位装件反射面的距离为pxpt,其中pt为第二测距仪发射的测量激光在辅助定位件反射面上的靶点;
37、处理器通过所述测斜仪测量值计算出直线lx与水平平面之间的夹角γ;
38、在直角三角形rtδcxpxpt中,pxpt⊥lx,∠pxcxpt=α=θ-γ,θ为辅助定位件上反射面与水平面β之间的夹角;cx为直线lx与辅助定位件上的斜线l1或斜线l2的延长线的交点,由基于直线lx的方程和斜线l1或斜线l2的方程求得;
39、由cxpx=pxpt*cotα,计算出px点的空间位置,根据第二测距仪与设备顶端之间的固定位置关系,求算出设备顶端最终的实际变形位移。
40、与现有技术相比,本发明的有益效果:
41、本发明实现采用2台激光测距仪联合1台倾斜仪的联合测量方法,直接从外部测量电力塔筒的整体倾斜变形。
42、具体地,本发明通过在第一安装台(参考基础平面)设置一坐标信息确定的第一激光测距仪,其测量激光束垂直向上照射位于待测设备顶部的第二安装台,以测取位于第二安装台表平面α内的激光反射靶点a的空间坐标,通过安装在第二安装台上的测斜仪获得平面α的法向量,从而获得平面α的点-法式方程;同时,通过在第一安装台设置一坐标信息确定的辅助定位件,在平面α安装一台与待测设备之间存在固定映射位置关系的第二激光测距仪,通过测量其与辅助定位件反射斜面之间的距离信息,及测斜仪提供的倾斜方向信息,可计算出待测设备发生倾斜变形后,第二激光测距仪的新的空间坐标信息,基于第二激光测距仪与待测设备之间的固定映射位置关系,求算出设备顶端最终的实际变形位移。
- 还没有人留言评论。精彩留言会获得点赞!